发布和yaml文件的初步了解。
pod:是k8s中最小的资源管理组件。
pod也是最小化运行容器化的应用的资源管理对象。
pod是一个抽象的概念,可以理解为一个或者多个容器化应用的集合。
在一个pod当中运行一个容器是最常用的方式。
在一个pod当中可以同时运行多个容器,在一个pod当中可以同时封装几个需要耦合热点互相写在的容器。
这些多个容器共享资源,也可以互相协作组成一个service单位。
不论是运行一个容器还是多个容器,k8s管理的都是pod而部署容器。
一个pod内的容器,必须都运行在同一节点。基于现代容器技术的要求,就是一个pod运行一个容器,一个容器只运行一个进程(最常见用法)。
横向扩展,方便扩缩容
解耦,一个pod内运行多个容器,耦合度太高,一旦一个进程失败,整个pod将全部失败。实现解耦,基紆pod可以创建多个副本实现高可用和负载均衡。
管理方便,简单直观。
pod内的容器共享资源。共享机制:pause底层基础容器来提高资源的机制。
pause容器是基础容器,也可以称为父容器。管理pod内容器的共享操作。
pause还可以管理容器的生命周期。
k8s提供了pause容器
pause最基础的init容器,提供容器之间的通信,容器里面的第一层。
1,为pod内的所有容器提高一个命名空间,提供基础环境,给容器提供资源,pod里的容器资源共享。
2,pause启动容器内的pid命名空间,是每个pod中都作为pid为1的进程(init进程),回收僵尸进程。是所有进程的父进程,管理pod内部所有进程。
3,创建pod之前会先创建pause容器,在拉取镜像,生成容器,形成pod。
kubelet管理node节点告诉如何创建pod,创建pause,pause来管理pod内的容器。
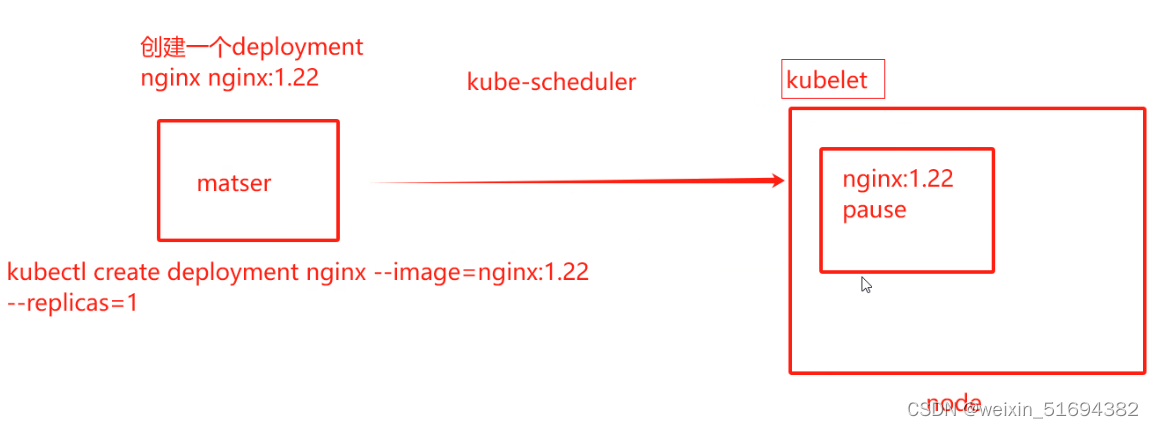
第一步:master节点发出指令,pod只有的镜像nginx pod的副本数
第二步:kube-scheduler来分配执行node节点
第三步:node节点的kubelet收到master指令,拉pause,拉nginx:1.22 pod1
第四步: pause容器先启动,提供命名空间,进程管理pid1 来为pod内的容器提供共享服务以及容器的进程管理。
pause容器共享两种资源
网络资源:每一个pod都会被分配一个集群内部唯一ip地址。pod内容器共享网络,通过pod在集群内部的IP地址和端口。pod内部的容器可以使用localhost互相通信。pod的中容器与外部通信时,从共享的资源当中进行分配。宿主机的端口映射。pod和容器共享IP地址。
存储资源:pod可以指定多个共享的volume挂载卷,pod内部的容器共享这些vloume卷。
volume可以时实现数据的持久化。
防止pod重新构建之后文件消失。
总结:
每个pod都有一个基础容器pause容器。
pause容器对应的镜像属于k8s集群的一部分。创建集群就会有pause这个基础镜像。
在node节点上

pod里面包含了一个或者多个相关的容器(应用)
kube-controller-manager来分配ip地址,网络插件来通过网络服务。
为什么要在pod为再设置一个基础镜像:
1,pod内部有一组容器,挂了一个,整个pod也不会失效。引入了pause机制,代表整个容器组的状态。可以对pod内部容器整体状态的判断。
2,pod内的容器共享ip,共享volume挂载卷,解决了容器内网络通信的问题,解决了容器内部文件共享的问题。
pod的分类
自主式pod:pod不会自我修复,如果pod内容器的进程终止,被删除,缺少资源被驱逐,这个pod没有办法自愈。
控制器:deployment daemanset。
控制器管理pod:滚动升级,可以自愈(自动重启),可以管理pod 的数量以及pod的扩缩容。
pod的生命周期:
1,pending 挂起状态
pod已被创建,但是尚未被分配到node节点。(节点上资源不够,需要等待其他pod的调度)
2,running:运行中,pod已经被分配到了node节点,pod内部定义容器都已经启动,运行状态正常,稳定。
3,complete:
successed:
容器内部的进程运行完毕,正常退出。没有发生错误。
4,faild:pod中的容器非正常退出,发生了错误,需要通过查看详情和容器来单位问题。
5,UNkown:由于某些原因,k8s集群无法获取pod的状态。API-service出了问题
6,terminating:表示在终止中,正在被终止,还没有终止。里面的容器正在终止。过程中会进行资源回收,垃圾清理,以及终止过程中需要执行的命令。
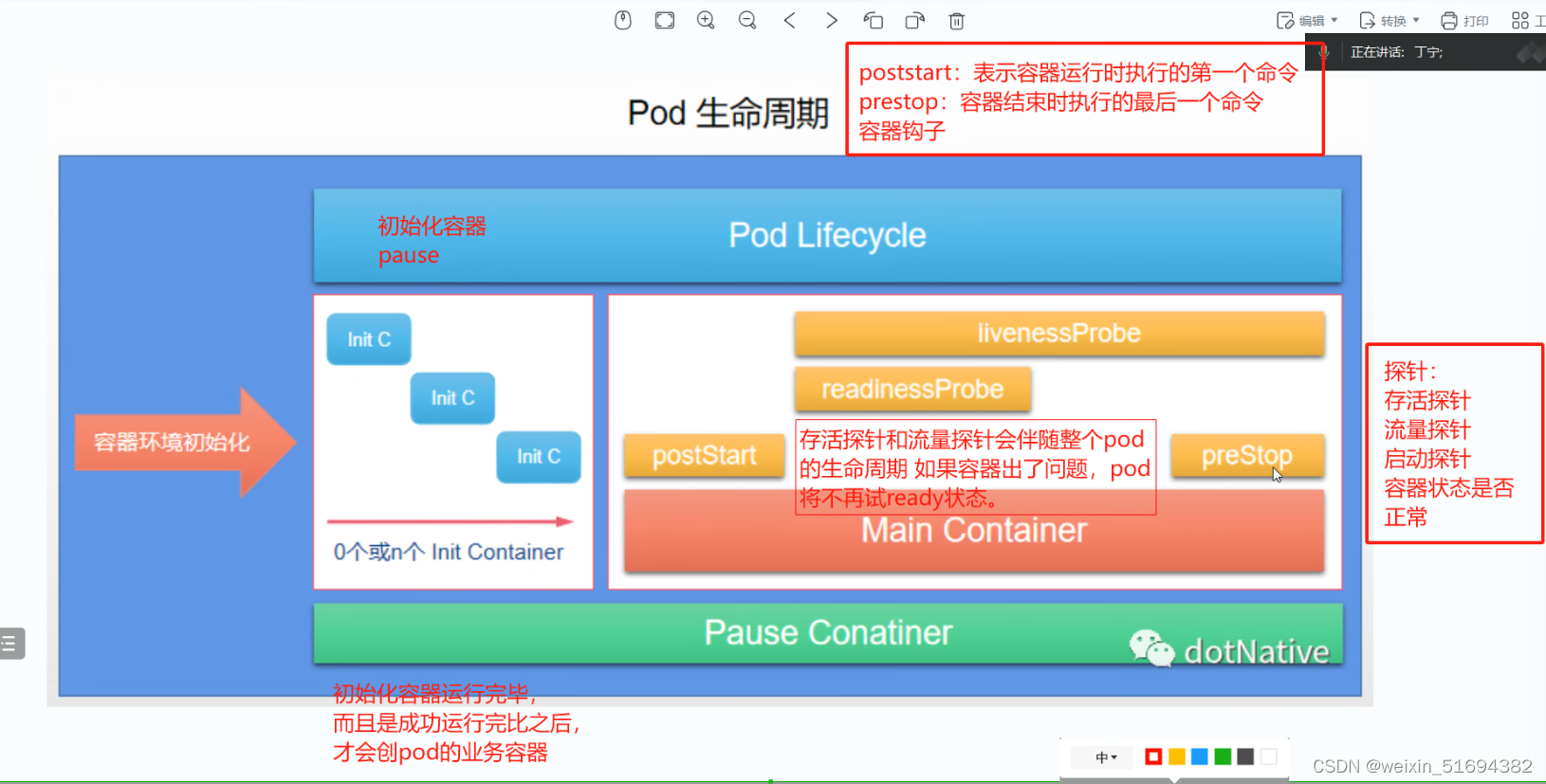
init C 初始化容器,基础容器pause,在初始化容器成功运行完毕之后,在乎创建pod的业务容器
poststart:表示容器运行时执行的第一个命令
prestop:容器结束时执行的最后一个命令
容器钩子
探针:
livenessProbe:存活探针
readnessProbe:流量探针
存活探针和流量探针会伴随整个pod的生命周期。随时检测容器的状态,如果容器出了问题,pod将不再是ready状态。
启动探针:
探针的目的:容器状态是否正常
创建pod发容器分类:
1,基础容器:pause
2,init容器(初始容器)init c
在1和2这个过程中。pod的状态就是init:完成之后才会到业务容器。
3,业务容器
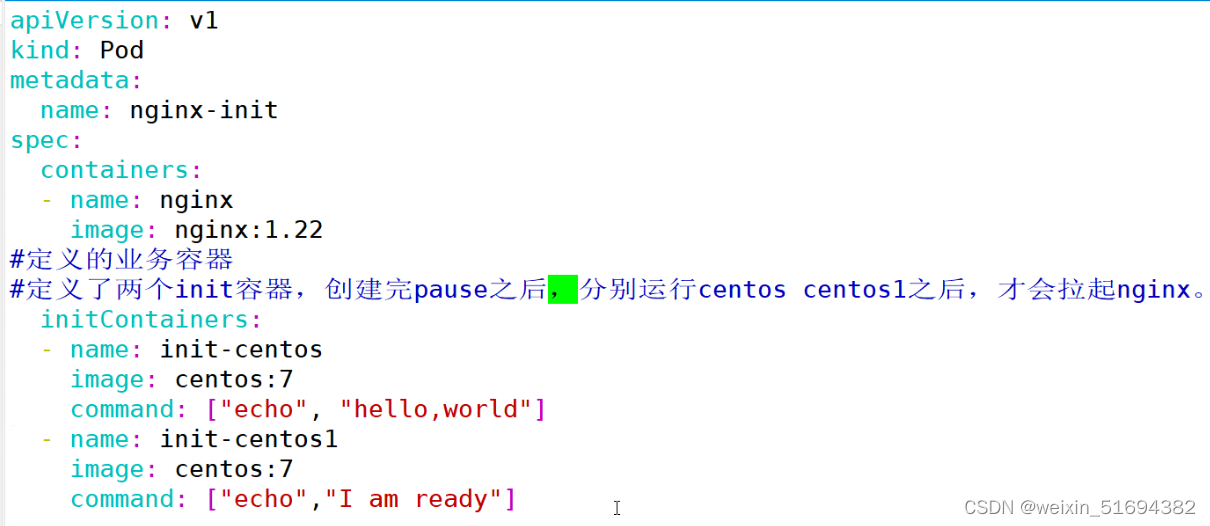
实验:
vim init.yaml
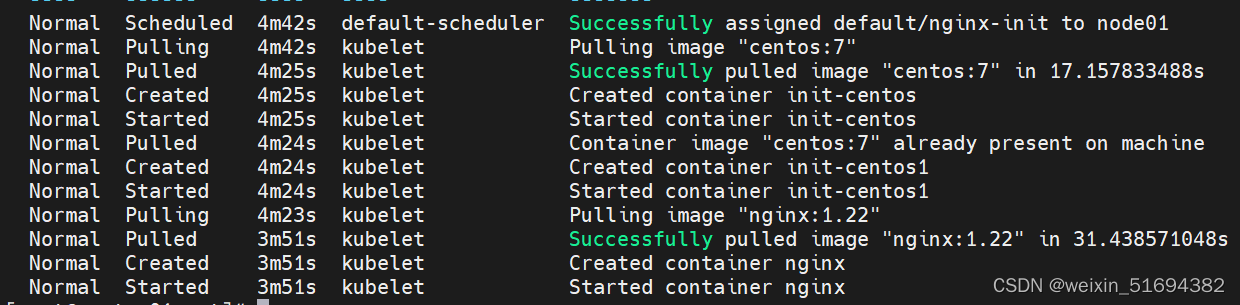
kubectl describe pod nginx-init
docker ps | grep nginx

init容器的作用:
环境变量:
可以在创建的过程中为业务的容器定制好相关的代码和工具
init容器独立于业务容器,他是单独构建的镜像,对业务容器不产生任何安全影响。
init容器能以不同于pod内应用容器的文件系统视图运行。secrets的权限。应用容器是无法访问secerts权限。
总结:init容器提供了应用容器运行之前的先决条件,提供了一种阻塞或者延迟机制来控制应用容器的启动。
只有前置条件满足,才会创建pod应用容器。
k8s的一种机制
按照顺序创建init容器,都成功创建了才会创建业务容器。
1,在pod的启动过程中,每一个初始化容器,容器按照初始化容器先启动,每个容器必须在下一个容器启动之前,要成功退出。
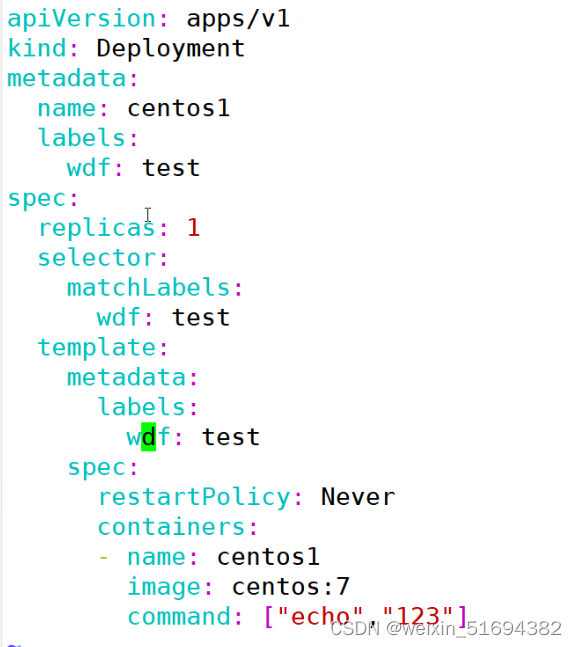
2,如果允许失败,会按照容器的重启策略进行指定动作,restartPolicy Always never onFailure(非正常退出才会重启)
3,所有的容器没有成功之前,pod是不会进入ready状态的。
init容器与service无关,不能对外提供访问。
4,如果重启pod,所有的init容器一定会重新执行。
5,如果修改init容器的spec(参数)只限制于image,其他的修改自动不生效(基于deployment)
6,每个容器的名称都要唯一,不能重复。
k8s当中的重启策略:

针对pod当中的所有容器
Always:只有容器退出,总是重启,物理容器的状态码是否正常。默认策略,可以不加
Never:只有容器退出,不论是否正常,都不重启
OnFailure:只有容器的状态码非0不正常退出才会重启,正常退出不重启。

默认情况下用Always。
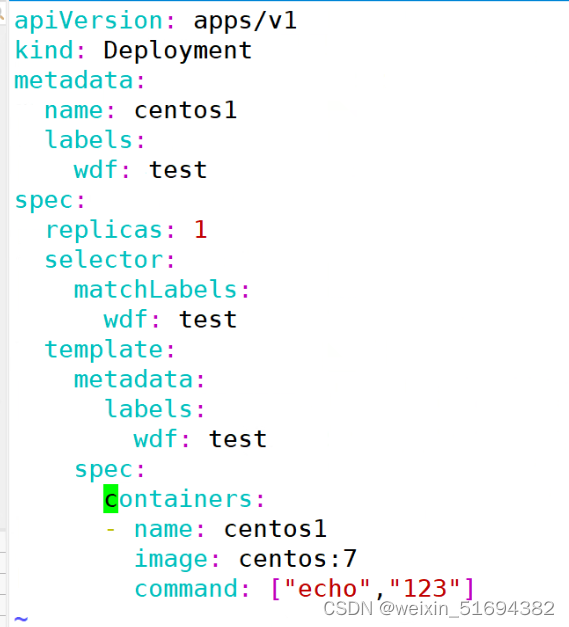
在deployment的yaml文件当中,重启的策略只能的always,可以不写。

总结:
pause容器:底层容器/基础容器
提供pod内容器的物理和存储共享,以及pod内容器退出之后资源回收。
init容器:人为设定的,业务容器启动之前的必要条件。
pod的生命周期:
1,pause基础容器
2,init容器---全部成功退出---业务容器
3,poststart prestop 容器的钩子 启动时命令和退出时的命令
4、探针:探测容器的健康状态。伴随pod的整个生命周期(除了启动探针)。
一句话:
pod就是用来封装容器的,业务是容器。服务也是容器。端口也是容器。