2 Paddle3D 雷达点云CenterPoint模型训练–包含KITTI格式数据地址
2.0 数据集 百度DAIR-V2X开源路侧数据转kitti格式。
2.0.1 DAIR-V2X-I\velodyne中pcd格式的数据转为bin格式
参考源码:雷达点云数据.pcd格式转.bin格式
def pcd2bin():
import numpy as np
import open3d as o3d
from tqdm import tqdm
import os
pcdPath = r'E:\DAIR-V2X-I\velodyne'
binPath = r'E:\DAIR-V2X-I\kitti\training\velodyne'
files = os.listdir(pcdPath)
files = [f for f in files if f[-4:]=='.pcd']
for ic in tqdm(range(len(files)), desc='进度 '):
f = files[ic]
pcdname = os.path.join(pcdPath, f)
binname = os.path.join(binPath, f[:-4] + '.bin')
# 读取PCD文件
# pcd = o3d.io.read_point_cloud("./data/002140.ply")
pcd = o3d.io.read_point_cloud(pcdname)
# print('==============pcd\n', pcd)
# print('==============pcd.points\n', pcd.points)
points = np.asarray(pcd.points)
# print('==============points\n', points)
# print(type(points))
# print(points.shape)
# 添加全0列
point0 = np.zeros((points.shape[0], 1))
points = np.column_stack((points,point0))
# print(points.shape)
# 查看点云图像
# o3d.visualization.draw_geometries([pcd])
# 将PCD格式保存为BIN格式,使用.tofile实现;
# 理论上o3d.io.write_point_cloud也可以实现,但是运行的时候,没有报错,但也并没有保存文件
points.tofile(binname)
o3d.io.write_point_cloud(os.path.join(binPath, f[:-4]+'.bin'), pcd)
# if ic == 1:
# break
可视化查看bin文件
def visBinData():
"""
可视化的形式查看点云数据的Bin文件
:return:
"""
import numpy as np
from tqdm import tqdm
import mayavi.mlab
import os
binPath = r'D:\lidar3D\data\Lidar0\bin'
# binPath = r'./data'
files = os.listdir(binPath)
files = [f for f in files if f[-4:] == '.bin']
for ic in tqdm(range(len(files)), desc='进度 '):
f = files[ic]
binname = os.path.join(binPath, f)
pointcloud = np.fromfile(binname, dtype=np.float32, count=-1).reshape([-1,4])
x = pointcloud[:, 0]
y = pointcloud[:, 1]
z = pointcloud[:, 2]
r = pointcloud[:, 3]
d = np.sqrt(x ** 2 + y ** 2) # Map Distance from sensor
degr = np.degrees(np.arctan(z / d))
vals = 'height'
if vals == "height":
col = z
else:
col = d
fig = mayavi.mlab.figure(bgcolor=(0, 0, 0), size=(640, 500))
mayavi.mlab.points3d(x, y, z,
col, # Values used for Color
mode="point",
colormap='spectral', # 'bone', 'copper', 'gnuplot'
# color=(0, 1, 0), # Used a fixed (r,g,b) instead
figure=fig,
)
mayavi.mlab.show()
break
def visBinData():
import open3d as o3d
import numpy as np
import os
# 替换为你的 bin 文件路径
bin_file_path = r'E:\DAIR-V2X-I\kitti_s\training\velodyne'
files = os.listdir(bin_file_path)
for f in files[:]:
# 读取 bin 文件
bin_file = os.path.join(bin_file_path, f)
print(bin_file)
points_np = np.fromfile(bin_file, dtype=np.float32)
print(points_np.shape)
points_np = points_np.reshape(-1, 4)
print(points_np.shape)
# 创建 Open3D 点云对象
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points_np[:, :3])
# 可视化点云
o3d.visualization.draw_geometries([pcd])
打印查看bin文件中的数据
def readbinfiles():
import numpy as np
print('\n' + '*' * 10 + 'myData' + '*' * 10)
path = r'D:\lidar3D\data\mydatas1\kitti_my\training\velodyne\000003.bin'
# b1 = np.fromfile(path, dtype=np.float)
b2 = np.fromfile(path, dtype=np.float32, count=-1).reshape([-1, 4])
print(type(b2))
print(b2.shape)
print(b2)
2.0.2 先对应training中的所有数据准备好
————————training
______________calib
______________image_2
______________Label_2
______________velodyne
【1】velodyne
这里是所有的.bin格式的点云文件
【2】iamge_2
这里是velodyne中的点云文件对应的图片文件。从原文件里面相同名称的图片复制过来就可以了,这里原图片文件是.jpg的格式,kitti里面查找.png的格式好像是写死的,为避免麻烦,可以先把图片直接重命名为.png的格式。()
def jpg2png():
import os
path = r'E:\DAIR-V2X-I\example71\training\image_2'
files = os.listdir(path)
for f in files:
fsrc = os.path.join(path, f)
fdes = os.path.join(path, f[:-4]+'.png')
os.rename(fsrc, fdes)
【3】calib
两种方式,一种方式是忽略DAIR-V2X数据中的标定,直接复制kitti中calib/000000.txt
if calibFlag:
'''copy kitti-mini/training/calib/00000.txt cotent to my calib'''
calibPath = r'E:\DAIR-V2X-I\training\calib'
binPath = r'E:\DAIR-V2X-I\training\velodyne'
kitti_miniCalibPath = r'D:\lidar3D\data\kitti_mini\training\calib/000000.txt'
with open(kitti_miniCalibPath, "r") as calib_file:
content = calib_file.read()
for f in os.listdir(binPath):
with open(os.path.join(calibPath, f[:-4]+".txt"), "w") as wf:
wf.write(content)
另外一种方式是提取single-infrastructure-side\calib中的标定信息写进calib/xxxxxx.txt文件。因为DAIR-V2X只有一台相机,写到p0: ,R0_rect 和 Tr_velo_to_cam 也从中读取。由于Tr_velo_to_cam 是固定的,所以写死在了代码里面
if calibFlag1:
V2XVelodynePath = r'E:\DAIR-V2X-I\training\velodyne'
files = os.listdir(V2XVelodynePath)
files = [f[:-4]+'.txt' for f in files]
for f in files:
content=[]
cameintriPath = r'E:\DAIR-V2X-I\single-infrastructure-side\calib\camera_intrinsic'
with open(os.path.join(cameintriPath,f[:-4]+'.json'), "r") as rf1:
data = json.load(rf1)
p0 = 'P0:'
for d in data["P"]:
p0 += ' {}'.format(d)
R0_rect = 'R0_rect:'
for r in data["R"]:
R0_rect += ' {}'.format(r)
content.append(p0+'\n')
content.append('P1: 1 0 0 0 0 1 0 0 0 0 1 0\n')
content.append('P2: 1 0 0 0 0 1 0 0 0 0 1 0\n')
content.append('P3: 1 0 0 0 0 1 0 0 0 0 1 0\n')
content.append('R0_rect: 1 0 0 0 1 0 0 0 1\n')
# vir2camePath = os.path.join(V2XCalibPath, cliblist[1])
# with open(os.path.join(vir2camePath,f[:-4]+'.json'), "r") as rf1:
# data = json.load(rf1)
# R = data["rotation"]
# t = data["translation"]
Tr_velo_to_cam = 'Tr_velo_to_cam: -0.032055018882740139 -0.9974518923884874 0.020551248965447915 -2.190444561668236 -0.2240930139414797 0.002986041494130043 -0.8756800120708629 5.6360862566491909 0.9737455440255373 -0.041678350017788 -0.2023375046787095 1.4163664770754852\n'
content.append(Tr_velo_to_cam)
content.append('Tr_imu_to_velo: 1 0 0 0 0 1 0 0 0 0 1 0')
fcalibname = os.path.join(mykittiCalibPath, f)
# content[-1] = content[-1].replace('\n', '')
with open(fcalibname, 'w', encoding='utf-8') as wf:
wf.writelines(content)
【4】Label_2
方法{{{见 《 2.1.3中——【4】问题记录3 —— 重新生成label_2文件过程如下》章节}}}
点云的标签文件single-infrastructure-side\label\virtuallidar*.json转为txt文件存储,这里3Class,故只取类型([“Car”, “Cyclist”, “Pedestrian”])([‘Cyclist’, ‘Car’, ‘Truck’])。
这里将每个标签(目标)记作temp, temp [0:16] 共计16列,含义分别为:
类别[0]+是否截断[1]+是否遮挡[2]+观察角度[3]+图像左上右下[4:8]+高宽长[8:11]+相机坐标系xyz[11:14]+方向角[14]+置信度[15]
注意:测试数据集才有最后一列的置信度。
json转txt代码如下,因为只训练点云数据,所以与图片相关的值这里用0代替。
如下代码是直接取json文件中的数据,尺寸取雷达坐标系下的,位置取相机坐标系下的。
if label_2Flag:
# 1 创建文件夹 label_2
label_2Path = r'E:\DAIR-V2X-I\kitti_s\training\label_22_kitti3clsNewXYZ'
judgefolderExit_mkdir(label_2Path)
V2XVelodynePath = r'E:\DAIR-V2X-I\kitti_s\training\velodyne'
files = os.listdir(V2XVelodynePath)
files = [f[:-4] + '.txt' for f in files]
V2XLabelPathcamera = r'E:\DAIR-V2X-I\single-infrastructure-side\label\camera'
V2XLabelPathlidar = r'E:\DAIR-V2X-I\single-infrastructure-side\label\virtuallidar'
# 2 转化生成对应的.txt标签文件
labelsList = {}
labelsListnew = {}
for f in files[:]:
# print(f)
with open(os.path.join(V2XLabelPathcamera, f[:-4] + '.json'), "r") as rf1:
dataca = json.load(rf1)
with open(os.path.join(V2XLabelPathlidar, f[:-4] + '.json'), "r") as rf1:
datali = json.load(rf1)
label_list = []
if len(dataca) != len(datali):
print('Error: len(dataca) != len(datali)')
continue
for oi in range(len(dataca)):
obj_ca = dataca[oi]
obj_li = datali[oi]
label_name = obj_ca["type"]
label_nameli = obj_li["type"]
if label_name != label_nameli:
print('Error: label_name != label_nameli')
continue
# static labels
if label_name in labelsList.keys():
labelsList[label_name] += 1
else:
labelsList[label_name] = 1
# updata label type
# Car 、 Cyclist、
if label_name == 'Trafficcone' or label_name == 'ScooterRider' or label_name == 'Barrowlist':
continue
elif label_name == 'Motorcyclist':
label_name = 'Cyclist'
elif label_name == 'Van':
label_name = 'Car'
elif label_name == 'Bus':
label_name = 'Car'
elif label_name == 'Truck':
label_name = 'Car'
if label_name in labelsListnew.keys():
labelsListnew[label_name] += 1
else:
labelsListnew[label_name] = 1
scale = obj_li["3d_dimensions"] # 尺寸取雷达坐标系下的
pos = obj_ca["3d_location"] # 位置取相机坐标系下的
rot = obj_li["rotation"]
alpha = obj_ca["alpha"] # 观察角度[3]
cabox = obj_ca["2d_box"] # 图像左上右下[4:8]
occluded_state = obj_ca["occluded_state"] # 是否遮挡[2]
truncated_state = obj_ca["truncated_state"] # 是否截断[1]
tempFlag = True # label_list.append(temp)
if tempFlag == True:
# 2.1 temp 追加目标类型
# temp [0:16] 共计16列
# 类别[0]+是否截断[1]+是否遮挡[2]+观察角度[3]+图像左上右下[4:8]+高宽长[8:11]+
# 相机坐标系xyz[11:14]+方向角[14]+置信度[15]
# 注意:测试数据集才有最后一列的置信度
temp = label_name + ' '+ truncated_state +' '+ occluded_state +' 0 ' + \
cabox["xmin"] + ' ' + cabox["ymin"] + ' ' + cabox["xmax"] + ' ' + cabox["ymax"] + ' '
temp += (scale['h'].split('.')[0] + "." + scale['h'].split('.')[1][:2] + ' ')
temp += (scale['w'].split('.')[0] + "." + scale['w'].split('.')[1][:2] + ' ')
temp += (scale['l'].split('.')[0] + "." + scale['l'].split('.')[1][:2] + ' ')
# 2.2.1 pos_xyz
# temp += (pos['x'].split('.')[0] + "." + pos['x'].split('.')[1][:2] + ' ')
# temp += (pos['y'].split('.')[0] + "." + pos['y'].split('.')[1][:2] + ' ')
# temp += (pos['z'].split('.')[0] + "." + pos['z'].split('.')[1][:2] + ' ')
# 2.2 固定使用转换矩阵lidar_to_cam后
# 此处的矩阵目的将lidar转到cam下,再转换到rect下,同样追加到temp中(temp追加pos_xyz)
# trans_Mat: calib中的 Tr_velo_to_cam
trans_Mat = np.array(
[[-3.205501888274e-02, -9.974518923885e-01, 2.055124896545e-02, -2.190444561668e+00],
[-2.240930139415e-01, 2.986041494130e-03, -8.756800120709e-01, 5.636086256649e+00],
[9.737455440255e-01, -4.167835001779e-02, -2.023375046787e-01, 1.416366477075e+00],
[0, 0, 0, 1]])
# R0_rect: 三维单位矩阵
rect_Mat = np.array([[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]])
ptx = str2float(pos["x"])
pty = str2float(pos["y"])
# print('pos["z"], scale["l"], type(scale["l"])\n', pos["z"], scale["l"], type(scale["l"]))
ptz = str2float(pos["z"]) - (0.5 * str2float(scale["l"]))
# lidar坐标系下的相机中心点
pt_in_lidar = np.array([[ptx],
[pty],
[ptz],
[1.]])
pt_in_camera = np.matmul(trans_Mat, pt_in_lidar)
pt_in_rect = np.matmul(rect_Mat, pt_in_camera)
temp += str(pt_in_rect[0, 0]).split('.')[0] + "." + str(pt_in_rect[0, 0]).split('.')[1][0:2]
temp += " "
temp += str(pt_in_rect[1, 0]).split('.')[0] + "." + str(pt_in_rect[1, 0]).split('.')[1][0:2]
temp += " "
temp += str(pt_in_rect[2, 0]).split('.')[0] + "." + str(pt_in_rect[2, 0]).split('.')[1][0:2]
temp += " "
## 2.3 temp 追加 rot_xyz(先将 rot 航向角 返回到0-360°之间)
rot = - str2float(rot) - (np.pi / 2)
if rot > np.pi:
rot = rot - 2 * np.pi
elif rot < -np.pi:
rot = rot + 2 * np.pi
temp += str(rot).split('.')[0] + "." + str(rot).split('.')[1][0:2] + "\n"
label_list.append(temp)
label_list[-1] = label_list[-1].replace('\n', '')
# print(label_list)
with open(os.path.join(label_2Path, f[:-4]+'.txt'), "w") as wf:
wf.writelines(label_list)
print('labels Statics = ', labelsList)
print('labels Statics = ', labelsListnew)
如下代码考虑重新计算了位置信息,固定使用转换矩阵lidar_to_cam。[“Car”, “Cyclist”, “Pedestrian”]
if label_2Flag:
# 1 创建文件夹 label_2
label_2Path = r'E:\DAIR-V2X-I\kitti\training\Label_2'
judgefolderExit_mkdir(label_2Path)
V2XVelodynePath = r'E:\DAIR-V2X-I\kitti\training\velodyne'
files = os.listdir(V2XVelodynePath)
files = [f[:-4] + '.txt' for f in files]
V2XLabelPathcamera = r'E:\DAIR-V2X-I\single-infrastructure-side\label\camera'
V2XLabelPathlidar = r'E:\DAIR-V2X-I\single-infrastructure-side\label\virtuallidar'
# 2 转化生成对应的.txt标签文件
labelsList = {}
labelsListnew = {}
for f in files[:]:
# print(f)
with open(os.path.join(V2XLabelPathcamera, f[:-4] + '.json'), "r") as rf1:
dataca = json.load(rf1)
with open(os.path.join(V2XLabelPathlidar, f[:-4] + '.json'), "r") as rf1:
datali = json.load(rf1)
label_list = []
if len(dataca) != len(datali):
print('Error: len(dataca) != len(datali)')
continue
for oi in range(len(dataca)):
obj_ca = dataca[oi]
obj_li = datali[oi]
label_name = obj_ca["type"]
label_nameli = obj_li["type"]
if label_name != label_nameli:
print('Error: label_name != label_nameli')
continue
# static labels
if label_name in labelsList.keys():
labelsList[label_name] += 1
else:
labelsList[label_name] = 1
# updata label type
# Car 、 Cyclist、
if label_name == 'Trafficcone' or label_name == 'ScooterRider' or label_name == 'Barrowlist':
continue
elif label_name == 'Motorcyclist':
label_name = 'Cyclist'
elif label_name == 'Van':
label_name = 'Car'
elif label_name == 'Bus':
label_name = 'Car'
elif label_name == 'Truck':
label_name = 'Car'
if label_name in labelsListnew.keys():
labelsListnew[label_name] += 1
else:
labelsListnew[label_name] = 1
scale = obj_li["3d_dimensions"] # 尺寸取雷达坐标系下的
pos = obj_ca["3d_location"] # 位置取相机坐标系下的
rot = obj_li["rotation"]
tempFlag = False # label_list.append(temp)
if tempFlag == True:
# 2.1 temp 追加目标类型
# temp [0:16] 共计16列
# 类别[0]+是否截断[1]+是否遮挡[2]+观察角度[3]+图像左上右下[4:8]+高宽长[8:11]+
# 相机坐标系xyz[11:14]+方向角[14]+置信度[15]
# 注意:测试数据集才有最后一列的置信度
temp = label_name + ' 0 0 0 0 0 0 0 '
temp += (scale['h'].split('.')[0] + "." + scale['h'].split('.')[1][:2] + ' ')
temp += (scale['w'].split('.')[0] + "." + scale['w'].split('.')[1][:2] + ' ')
temp += (scale['l'].split('.')[0] + "." + scale['l'].split('.')[1][:2] + ' ')
# 2.2.1 pos_xyz
# temp += (pos['x'].split('.')[0] + "." + pos['x'].split('.')[1][:2] + ' ')
# temp += (pos['y'].split('.')[0] + "." + pos['y'].split('.')[1][:2] + ' ')
# temp += (pos['z'].split('.')[0] + "." + pos['z'].split('.')[1][:2] + ' ')
# 2.2 固定使用转换矩阵lidar_to_cam后
# 此处的矩阵目的将lidar转到cam下,再转换到rect下,同样追加到temp中(temp追加pos_xyz)
trans_Mat = np.array(
[[6.927964000000e-03, -9.999722000000e-01, -2.757829000000e-03, -2.457729000000e-02],
[-1.162982000000e-03, 2.749836000000e-03, -9.999955000000e-01, -6.127237000000e-02],
[9.999753000000e-01, 6.931141000000e-03, -1.143899000000e-03, -3.321029000000e-01],
[0, 0, 0, 1]])
rect_Mat = np.array([[9.999128000000e-01, 1.009263000000e-02, -8.511932000000e-03, 0],
[-1.012729000000e-02, 9.999406000000e-01, -4.037671000000e-03, 0],
[8.470675000000e-03, 4.123522000000e-03, 9.999556000000e-01, 0],
[0, 0, 0, 1]])
ptx = str2float(pos["x"])
pty = str2float(pos["y"])
# print('pos["z"], scale["l"], type(scale["l"])\n', pos["z"], scale["l"], type(scale["l"]))
ptz = str2float(pos["z"]) - (0.5 * str2float(scale["l"]))
# lidar坐标系下的相机中心点
pt_in_lidar = np.array([[ptx],
[pty],
[ptz],
[1.]])
pt_in_camera = np.matmul(trans_Mat, pt_in_lidar)
pt_in_rect = np.matmul(rect_Mat, pt_in_camera)
temp += str(pt_in_rect[0, 0]).split('.')[0] + "." + str(pt_in_rect[0, 0]).split('.')[1][0:2]
temp += " "
temp += str(pt_in_rect[1, 0]).split('.')[0] + "." + str(pt_in_rect[1, 0]).split('.')[1][0:2]
temp += " "
temp += str(pt_in_rect[2, 0]).split('.')[0] + "." + str(pt_in_rect[2, 0]).split('.')[1][0:2]
temp += " "
## 2.3 temp 追加 rot_xyz(先将 rot 航向角 返回到0-360°之间)
rot = - str2float(rot) - (np.pi / 2)
if rot > np.pi:
rot = rot - 2 * np.pi
elif rot < -np.pi:
rot = rot + 2 * np.pi
temp += str(rot).split('.')[0] + "." + str(rot).split('.')[1][0:2] + "\n"
label_list.append(temp)
# label_list[-1] = label_list[-1].replace('\n', '')
# with open(os.path.join(label_2Path, f[:-4]+'.txt'), "w") as wf:
# wf.writelines(label_list)
print('labels Statics = ', labelsList )
print('labels Statics = ', labelsListnew )
2.0.3 kitti\testing中的数据类似training中数据
仅需移动部分数据作为test是数据即可
————————testing
______________calib
______________image_2
______________Label_2
______________velodyne
2.0.4 写kitti/ImageSets 中的txt文件
注意:如下代码中val.txt 与test.txt中的文件是一致的
def filesPath2txt():
import os, random
pathtrain = 'E:\DAIR-V2X-I\kitti_s/training/velodyne/'
pathtest = 'E:\DAIR-V2X-I\kitti_s/testing/velodyne/'
txtPath = 'E:\DAIR-V2X-I\kitti_s/ImageSets/'
txt_path_train = os.path.join(txtPath, 'train.txt')
txt_path_val = os.path.join(txtPath, 'val.txt')
# txt_path_trainval = os.path.join(txtPath, 'trainval.txt')
txt_path_test = os.path.join(txtPath, 'test.txt')
# mkdirImageSets(txt_path_train, txt_path_val, txt_path_trainval, txt_path_test)
files = os.listdir(pathtrain)
filesList = [f[:-4] + '\n' for f in files]
filestr = filesList
filestr[-1] = filestr[-1].replace('\n', '')
with open(txt_path_train, 'w', encoding='utf-8') as wf:
wf.writelines(filestr)
files = os.listdir(pathtest)
filesList = [f[:-4] + '\n' for f in files]
filesval = filesList # random.sample(filesList, 700)
filesval[-1] = filesval[-1].replace('\n', '')
with open(txt_path_val, 'w', encoding='utf-8') as wf:
wf.writelines(filesval)
# filestest = random.sample(filesList, 400)
# filestest[-1] = filestest[-1].replace('\n', '')
with open(txt_path_test, 'w', encoding='utf-8') as wf:
wf.writelines(filesval)
2.1 paddle3D训练
cd ./Paddle3D
2.1.1 数据
【1】数据
数据存放在Paddle3D/datasets目录下,结构如下:
datasets/
datasets/KITTI/
————datasets/KITTI/ImageSets
————datasets/KITTI/testing
————datasets/KITTI/training
【2】数据预处理
使用如下代码完成数据的预处理操作
python tools/create_det_gt_database.py --dataset_name kitti --dataset_root ./datasets/KITTI --save_dir ./datasets/KITTI
上述过程打印如下,运行结束会生成datasets/KITTI/kitti_train_gt_database目录。
root/anaconda3/envs/pip_paddle_env/lib/python3.8/site-packages/setuptools/sandbox.py:13: DeprecationWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io/en/latest/pkg_resources.html
import pkg_resources
root/anaconda3/envs/pip_paddle_env/lib/python3.8/site-packages/pkg_resources/__init__.py:2871: DeprecationWarning: Deprecated call to `pkg_resources.declare_namespace('mpl_toolkits')`.
Implementing implicit namespace packages (as specified in PEP 420) is preferred to `pkg_resources.declare_namespace`. See https://setuptools.pypa.io/en/latest/references/keywords.html#keyword-namespace-packages
declare_namespace(pkg)
root/anaconda3/envs/pip_paddle_env/lib/python3.8/site-packages/pkg_resources/__init__.py:2871: DeprecationWarning: Deprecated call to `pkg_resources.declare_namespace('google')`.
Implementing implicit namespace packages (as specified in PEP 420) is preferred to `pkg_resources.declare_namespace`. See https://setuptools.pypa.io/en/latest/references/keywords.html#keyword-namespace-packages
declare_namespace(pkg)
ortools not installed, install it by "pip install ortools==9.1.9490" if you run BEVLaneDet model
2023-12-26 17:45:46,823 - INFO - Begin to generate a database for the KITTI dataset.
2023-12-26 17:46:06,774 - INFO - [##################################################] 100.00%
2023-12-26 17:46:07,012 - INFO - The database generation has been done.
2.1.2 模型配置文件
为避免修改原模型配置文件,先复制一份并命名为centerpoint_pillars_016voxel_kitti_my.yml
cp ./configs/centerpoint/centerpoint_pillars_016voxel_kitti.yml ./configs/centerpoint/centerpoint_pillars_016voxel_kitti_my.yml
核对文件中的相关配置信息
train_dataset:
type: KittiPCDataset
dataset_root: datasets/KITTI
... ...
class_names: ["Car", "Cyclist", "Pedestrian"]
2.1.3 训练流程及问题调试
【1】使用如下代码进行训练
# python -m paddle.distributed.launch --gpus 0,1,2,3,4,5,6,7 tools/train.py --config configs/centerpoint/centerpoint_pillars_016voxel_kitti.yml --save_dir ./output_kitti --num_workers 4 --save_interval 5
python tools/train.py --config configs/centerpoint/centerpoint_pillars_016voxel_kitti_my.yml --save_dir ./output_kitti --save_interval 5 > 112.log
参数介绍
-m:使用python -m paddle.distributed.launch方法启动分布式训练任务。
参考:https://www.paddlepaddle.org.cn/documentation/docs/zh/api/paddle/distributed/launch_cn.html
> 112.log : 将其中的打印保存在112.log中
【2】问题记录1
【2-1】SystemError: (Fatal) Blocking queue is killed because the data reader raises an exception.
【2-2】KeyError: ‘DataLoader worker(1) caught KeyError with message:\nTraceback (most recent call last):\n File “/home/… …”… … self.sampler_per_class[cls_name].sampling(num_samples)\n KeyError: ‘Car’\n’
【2-1、2-2】解决方法
参考1:SystemError: (Fatal) Blocking queue is killed because the data reader raises an exception : 没找到源码中的相关位置。
参考2:SystemError: (Fatal) Blocking queue is killed (baidu.com)
利用“参考2”中提供的方法, 训练的时候,将num_worker设置为0。如下:
python tools/train.py --config configs/centerpoint/centerpoint_pillars_016voxel_kitti_my.yml --save_dir ./output_kitti --num_workers 0 --save_interval 5
将num_workers 设置为0训练的时候,报如下错误
/Paddle3D/paddle3d/transforms/sampling.py", line 172, in sampling
sampling_annos = self.sampler_per_class[cls_name].sampling(num_samples)
KeyError: 'Car'
采用如下代码打印/Paddle3D/paddle3d/transforms/sampling.py", line 172中的信息,结果是{}。
print('self.sampler_per_class', self.sampler_per_class)
》》》》》》self.sampler_per_class {}
发现是配置文件中class_balanced_sampling参数是设置为False的原因。修改class_balanced_sampling为True如下
train_dataset:
type: KittiPCDataset
dataset_root: datasets/KITTI
... ...
mode: train
class_balanced_sampling: True
class_names: ["Car", "Cyclist", "Pedestrian"]
【3】问题记录2
【3-1】ZeroDivisionError: float division by zero
详细报错包含如下
File "/home/mec/hulijuan/Paddle3D/paddle3d/datasets/kitti/kitti_det.py", line 89, in <listcomp>
sampling_ratios = [balanced_frac / frac for frac in fracs]
ZeroDivisionError: float division by zero
上述问题打印 print(‘kitti_det.py’, cls_dist) 发现是自己数据集中没有"Pedestrian"类别,而class_names中包含该类别。解决办法是增加包含 "Pedestrian"类 的数据。
【4】问题记录3
【4-1】又报错问题同“【2】问题记录1 SystemError: … KeyError: …”,只能是大概上面的问题没有从根本上解决掉
首先看KeyError的问题。
在paddle3d/transforms/sampling.py/class SamplingDatabase(TransformABC):/def __ init __()中增加打印。如下
def __init__(self,
min_num_points_in_box_per_class: Dict[str, int],
max_num_samples_per_class: Dict[str, int],
database_anno_path: str,
database_root: str,
class_names: List[str],
ignored_difficulty: List[int] = None):
self.min_num_points_in_box_per_class = min_num_points_in_box_per_class
self.max_num_samples_per_class = max_num_samples_per_class
self.database_anno_path = database_anno_path
with open(database_anno_path, "rb") as f:
database_anno = pickle.load(f)
print('sampling.py__line58~~~~~~~~~~~~~~~~~~~~58database_anno: ', database_anno)
if not osp.exists(database_root):
raise ValueError(
f"Database root path {database_root} does not exist!!!")
self.database_root = database_root
self.class_names = class_names
self.database_anno = self._filter_min_num_points_in_box(database_anno)
self.ignored_difficulty = ignored_difficulty
if ignored_difficulty is not None:
self.database_anno = self._filter_ignored_difficulty(self.database_anno)
self.sampler_per_class = dict()
print('sampling.py__line70~~~~~~~~~~~~~~~70database_anno: ', self.database_anno)
for cls_name, annos in self.database_anno.items():
self.sampler_per_class[cls_name] = Sampler(cls_name, annos)
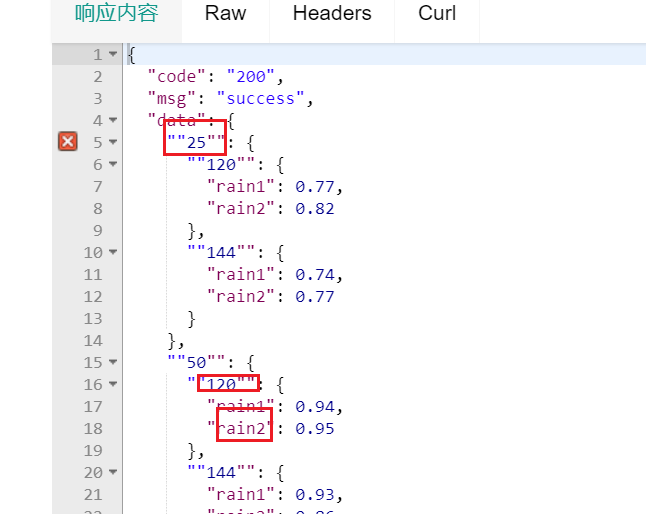
通过打印,可以看出sampling.py–line70的打印是空字典,而sampling.py–line58的打印部分如下:

上图可以看出,num_points_in_box 的值为 0。导致如下代码运行后,database_anno 变成了空字典
self.database_anno = self._filter_min_num_points_in_box(database_anno)
上述问题应该是针对点云文件生成标签文件的时候,方法错了。
重新生成label_2文件过程如下:
1 创建环境
conda create -n pcd2bin_env python=3.8
2 激活环境
conda activate pcd2bin_env
3 安装pypcd
3.1 参考:https://blog.csdn.net/weixin_44450684/article/details/92812746
如下流程:
git clone https://github.com/dimatura/pypcd
cd pypcd
git fetch origin pull/9/head:python3
git checkout python3
python3 setup.py install --user
python3
from pypcd import pypcd
pc = pypcd.PointCloud.from_path('pointcloud.pcd')
利用开源程序重新生成label_2文件过程如下:
源码百度网盘地址:
执行程序:
2.2 数据集地址KITTI格式(DAIR-V2X-I(7058帧数据)):(长期有效)
大小:22G
链接:https://pan.baidu.com/s/1gG_S6Vtx4iWAfAVAfOxWWw
提取码:p48l
数据没有问题 但是label_2中的XYZ需要根据前述lanel_2的方法重新生成。需下载该数据集的标签文件single-infrastructure-side-json.zip
2.3 模型
2.3.1 模型评估
2.3.2 模型测试
2.3.3 导出模型