Lecture 11-12 Geometry 2 (Curves and Surfaces)
Curves
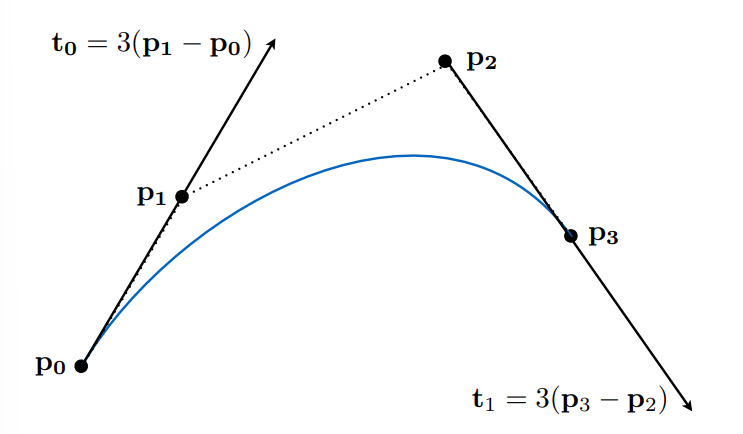
Bézier Curves 贝塞尔曲线
- 使用一系列的控制点定义某个曲线,控制点定义曲线满足的一些性质
- 可以定义出唯一的曲线,从 p 0 p_0 p0 开始, p 3 p_3 p3 结束
de Casteljau Algorithm 绘制贝塞尔曲线
- 给定任意多个控制点,生成贝塞尔曲线
对于两条线段,三个点的情况
- 使用线性插值的方式插入一个点
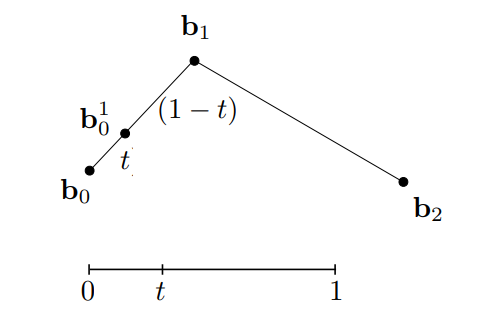
- 在另一条边等比例的插入另外一个点
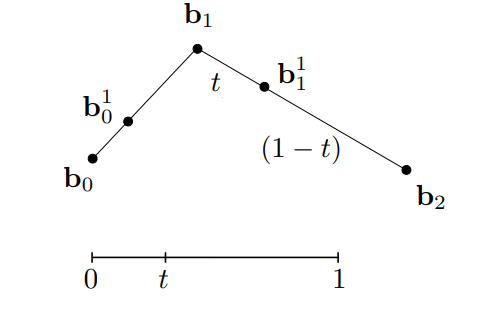
- 连接 b 0 1 b_0^1 b01 和 b 1 1 b_1^1 b11 得到 b 0 2 b_0^2 b02
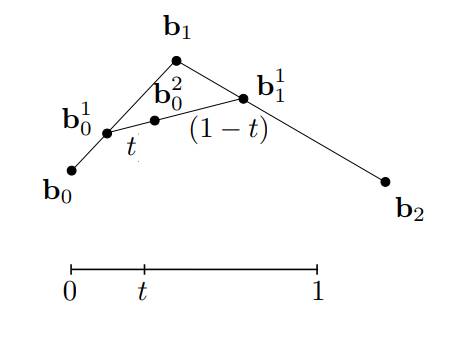
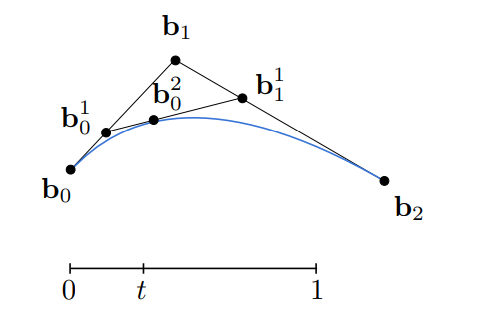
- 枚举 [ 0 , 1 ] [0,1] [0,1] 中所有的参数 t t t ,连接所有得到的 b 0 2 b_0^2 b02 ,就获得了生成的曲线
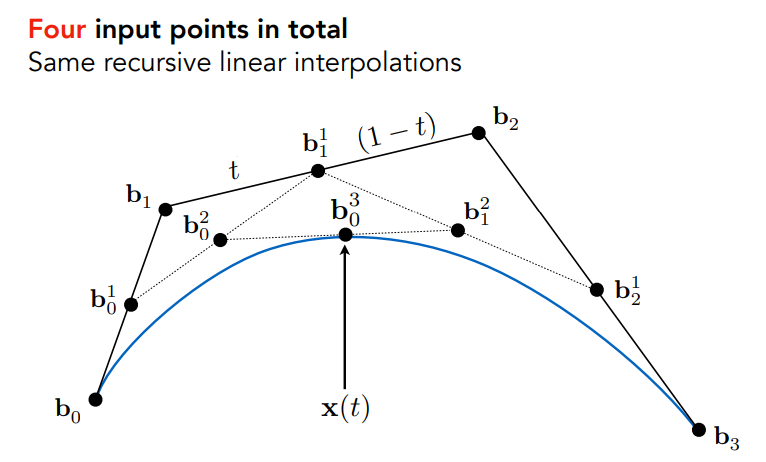
对于四条线段,三个点的情况,递归处理即可
Algebraic Formula
e.g. 三个点的贝塞尔曲线的例子
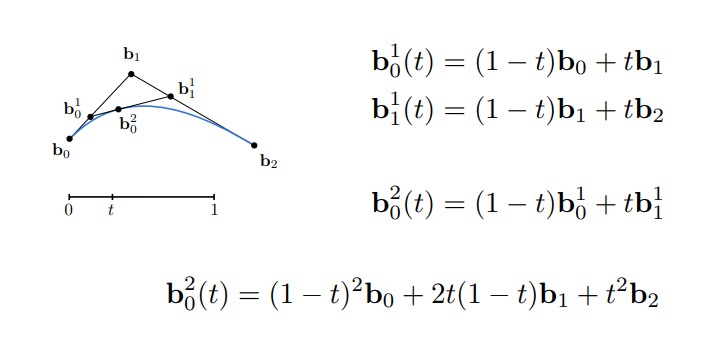
根据 b 0 1 b_0^1 b01 和 b 1 1 b_1^1 b11 得到 b 0 2 b_0^2 b02,将其展开容易得到上式,容易发现是系数是 ( 1 − t + t ) 2 (1-t +t)^2 (1−t+t)2 的形式,所以我们容易推理出贝塞尔曲线的一般代数表示
对于有
n
+
1
n+1
n+1 个点的贝塞尔曲线,在任意时间
t
t
t,它都是给定的控制点的线性组合
b
n
(
t
)
=
b
0
n
(
t
)
=
∑
j
=
0
n
b
j
B
j
n
(
t
)
\mathbf{b}^n(t)=\mathbf{b}_0^n(t)=\sum_{j=0}^n \mathbf{b}_j B_j^n(t)
bn(t)=b0n(t)=j=0∑nbjBjn(t)
其中,
B
j
n
(
t
)
B_j^n(t)
Bjn(t) 是 Bernstein polynomial,描述为【就是描述
(
1
−
t
+
t
)
n
(1-t +t)^n
(1−t+t)n 的各项系数是多少】
B
i
n
(
t
)
=
(
n
i
)
t
i
(
1
−
t
)
n
−
i
B_i^n(t)=\left(\begin{array}{c} n \\ i \end{array}\right) t^i(1-t)^{n-i}
Bin(t)=(ni)ti(1−t)n−i
Features
- 对贝塞尔曲线的控制点做仿射变换(线性变换+平移)相当于对贝塞尔曲线做仿射变换
- 投影是不满足此性质
- 贝塞尔曲线的凸包性质:画出的贝塞尔曲线一定在几个控制点形成的凸包内
Piecewise Bézier Curves 逐段的贝塞尔曲线
当控制点较多时,贝塞尔曲线的形状不好控制。在实际的情况中,使用多段贝塞尔曲线进行首尾相接得到新曲线(一般使用四个控制点的三次贝塞尔曲线),这种方法就叫做逐段的贝塞尔曲线
Continuity 贝塞尔曲线的连续性
- C 0 C^0 C0 continuity:第一段的终止点和第二段的起点相接
- C 1 C^1 C1 continuity:导数连续,控制点的左右两个控制点方向相反,距离控制点的距离相等 a n = b 0 = 1 2 ( a n − 1 + b 1 ) \mathbf{a}_n=\mathbf{b}_0=\frac{1}{2}\left(\mathbf{a}_{n-1}+\mathbf{b}_1\right) an=b0=21(an−1+b1)
Spline 样条曲线
一个可控的曲线
B-splines B样条
- Short for basis splines 基函数(由不同函数组合成别的函数)样条
- 对贝塞尔曲线的扩展,当贝塞尔曲线的阶数高时,动一个点对周围的影响大,而 B 样条曲线具有局部性,更加容易控制
Surfaces
贝塞尔曲面
Evaluating Surface Position For Parameters ( u , v ) (u,v) (u,v)
- Use de Casteljau to evaluate point u u u on each of the 4 Bezier curves in u. This gives 4 control points for the “moving” Bezier curve
- Use 1D de Casteljau to evaluate point v on the “moving” curve

Mesh Operations 曲面操作
- Mesh Subdivision (upsampling)
- Mesh Subdivision (upsampling)
- Decrease resolution
- try to preserve shape/appearance
- Mesh Regularization (same #triangles)
- Modify sample distribution to improve quality
Mesh Subdivision 细分
Loop Subdivision
- 只适用于三角形面

-
引入更多的三角形
- 连接原本三角形的三条边的中点,形成新的顶点
-
让三角形的位置发生一些变化,让原来的物体变得更加光滑
-
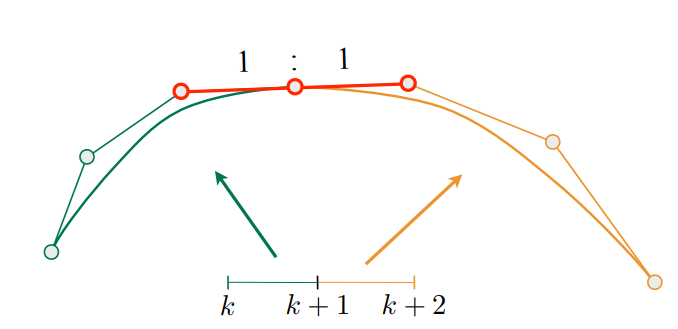
对于新的顶点
-
下图中的白色顶点为生成的新的顶点且被两个原三角形共享,认为 A , B A,B A,B 两点是距离白色点较近的两个点, C , D C,D C,D 两点是距离白色点较远的两个点,实质是一种加权平均,使得新出现的白点可以达到平滑的效果
-
Loop Subdivision 算法将白色顶点的坐标调整为
3 8 ( A + B ) + 1 8 ( C + D ) \frac{3}{8}(A+B) + \frac{1}{8}(C+D) 83(A+B)+81(C+D)
-
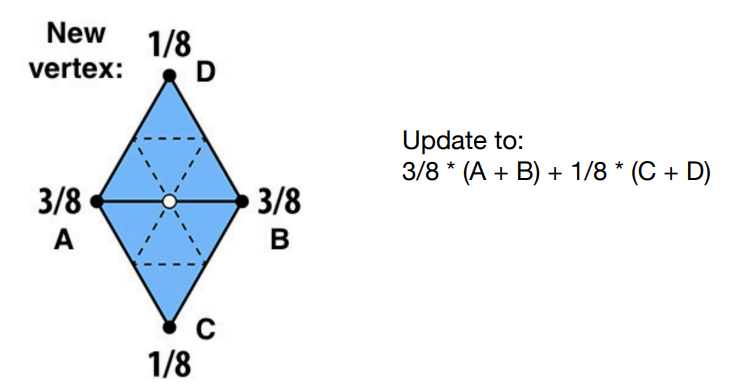
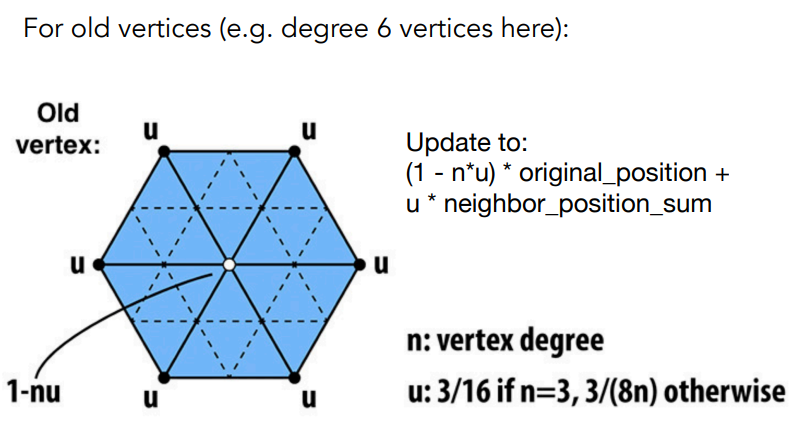
对于旧的顶点(虚线表示拆出的新三角形,老的顶点是中间的白色点)
-
Loop Subdivision 算法使得调整后的新顶点,一部分相信老的顶点的平均值,一部分受新的顶点的影响
-
定义 n n n 为白色顶点的度,下图中 n = 6 n=6 n=6
-
定义 u u u 为与 n n n 有关系的一个数。当 n = 3 n=3 n=3 时, u = 3 16 u=\frac{3}{16} u=163,当 n ≠ 3 n\ne 3 n=3 时, u = 3 8 n u = \frac{3}{8n} u=8n3
-
Loop Subdivision 算法将白色顶点的坐标调整为 (可以这么理解,如果一个顶点连了很多三角形,说明这个顶点可以由别人来决定,如果一个顶点连接的三角形数目很少,说明这个顶点自身比较重要,要更多的相信自己的信息)
( 1 − u n ) × original_position + u × neighbor_position_sum (1-un)\times \text{original\_position} + u\times\text{neighbor\_position\_sum} (1−un)×original_position+u×neighbor_position_sum
-
Catmull-Clark Subdivision (General Mesh)
- 适用于一般的情况,网格不是三角形网格
- 非四边形面 (Non-quad face):不是四边形的面
- 奇异点/异顶点 (Extraordinary vertex):度不为 4 4 4 的顶点
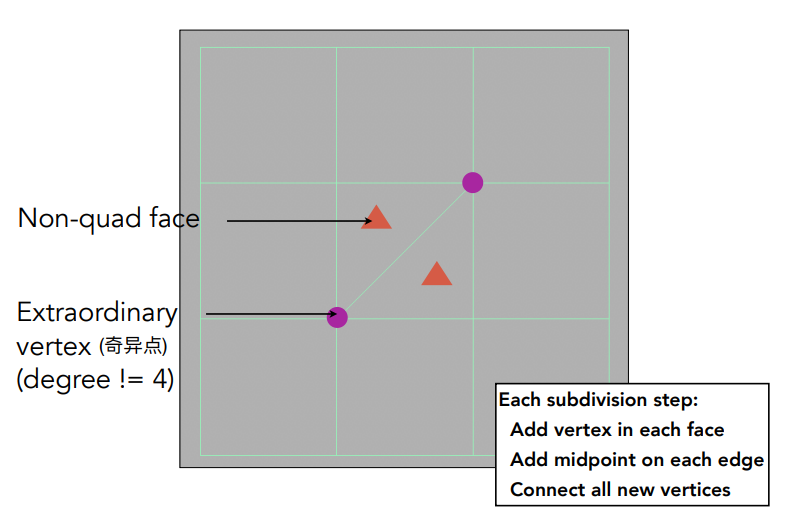
- 细分步骤
- 对所有的边和面取中点
- 将取出的中点连起来
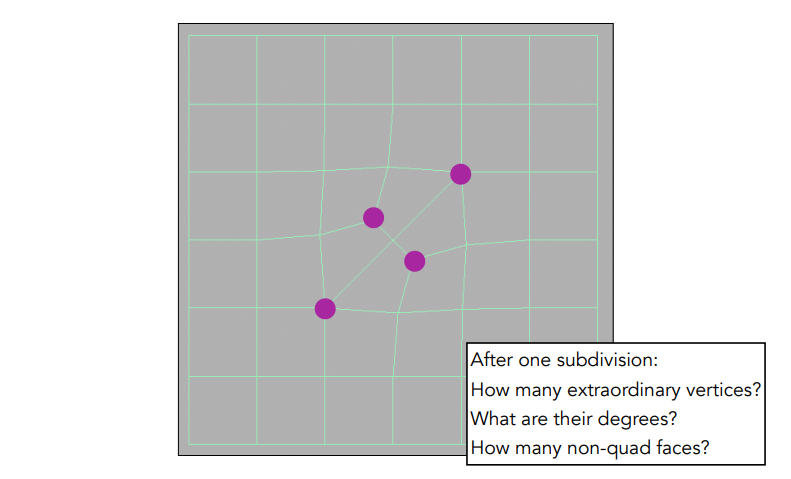
在一次细分之后,所有的非四边形面都消失了,每一个非四边形面都转化成了一个奇异点,之后奇异点的数目不会在增加了
- 调整步骤:将点区分成三类,分别更新他们的坐标
- 在一个面中心的新的点,设其为 f f f
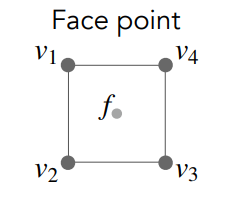
f
=
v
1
+
v
2
+
v
3
+
v
4
4
f=\frac{v_1+v_2+v_3+v_4}{4}
f=4v1+v2+v3+v4
-
在边中心的新的点,设其为 e e e
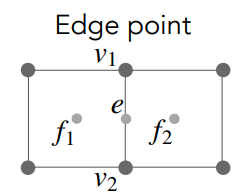
e = v 1 + v 2 + f 1 + f 2 4 e=\frac{v_1+v_2+f_1+f_2}{4} e=4v1+v2+f1+f2 -
老的点,设其为 v v v,定义 p p p 为老的点, m m m 为边的中点
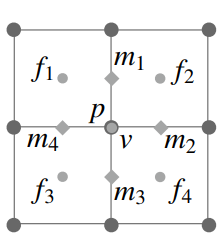
v
=
f
1
+
f
2
+
f
3
+
f
4
+
2
(
m
1
+
m
2
+
m
3
+
m
4
)
+
4
p
16
v=\frac{f_1+f_2+f_3+f_4+2\left(m_1+m_2+m_3+m_4\right)+4 p}{16}
v=16f1+f2+f3+f4+2(m1+m2+m3+m4)+4p
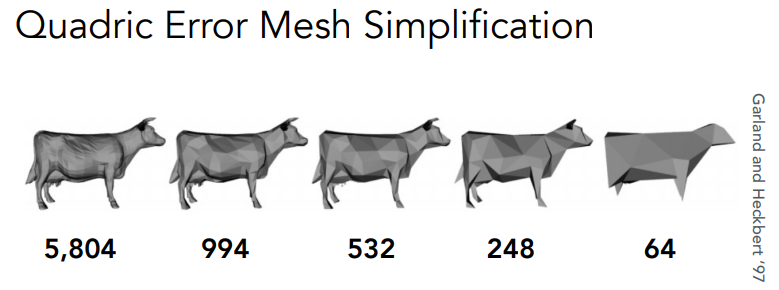
Mesh Simplification
Edge Collapse 边坍缩
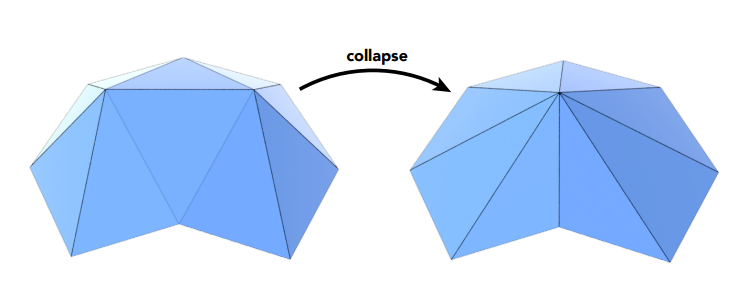
- 找到一条边,把连接这两条边的顶点变成一个顶点(捏起来)
- 使用 Quadric Error Metrics(二次误差度量)来确定坍缩的边
- Quadric error: new vertex should minimize its sum of square distance (L2 distance) to previously related triangle planes
- 找到一个最优的位置,使得这个点到它原本的面的距离平方和最小
- 选择最优的边:优先队列
- 选取二次度量误差最小的边
- 合并这个边
- 更新所有受这个边影响的边
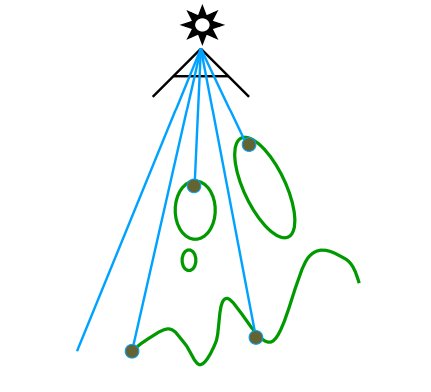
Shadow Mapping
- 如果有点在阴影里,就说明摄像机可以看到但光源看不到这个点
Algorithm
- Pass 1: Render from Light:从光源看向场景,记录光源能看到的深度图
- Pass 2A: Render from Eye:从摄像机出发,看场景,记录摄像机能看到的深度图
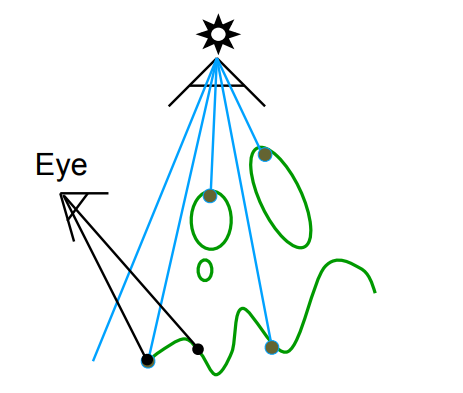
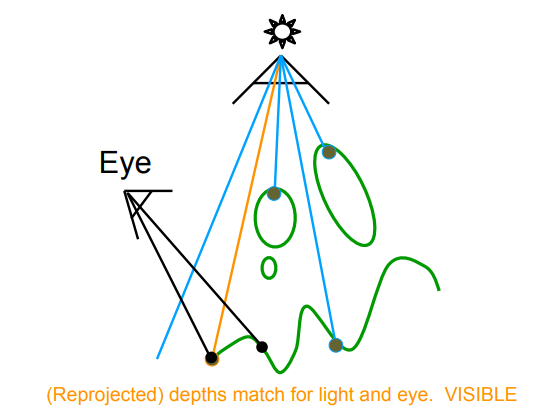
- Pass 2B: Project to light:把摄像机上看到的点投影回光源
- 如果这个点反投影回光源的深度和光源一致,说明这个点对光源可见(橙色线)
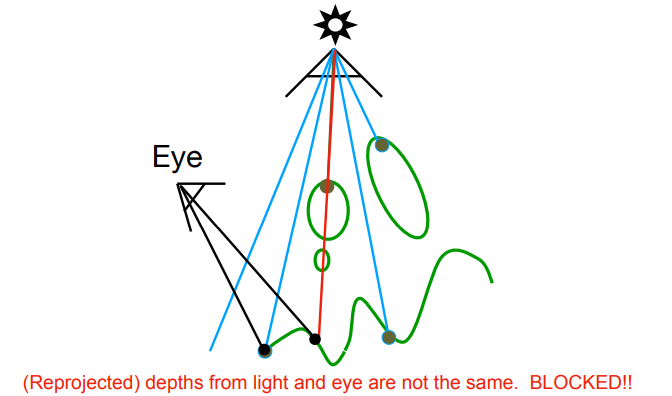
- 如果不一致,说明这个点是阴影(红色线)
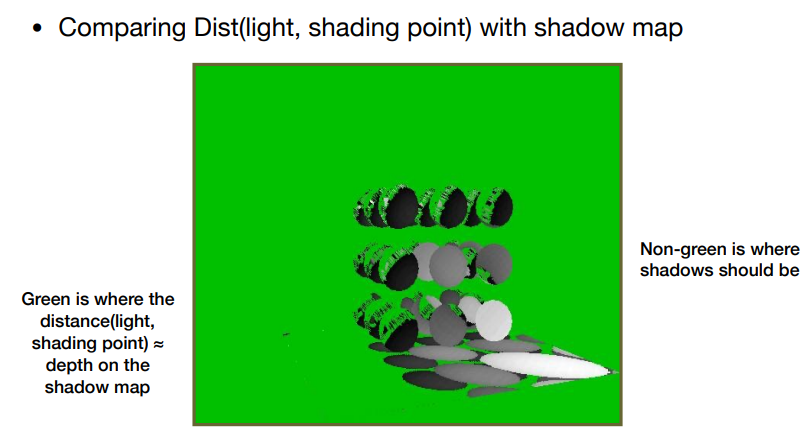
Cons
- 由于数值精度问题,判断两个距离是否相等时浮点数误差,导致阴影的边界不清晰
- 渲染两遍时的分辨率不同会导致误差,Shadow Map 的分辨率通常较低
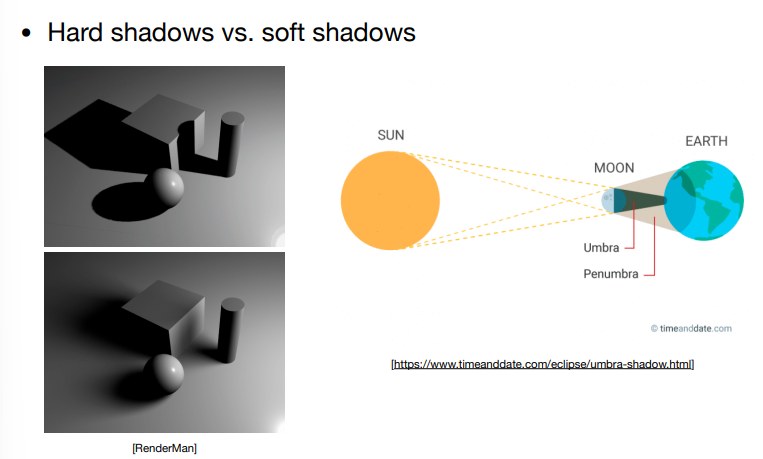
Hard Shadows vs. Soft Shadows
- 硬阴影:阴影的边界锐利
- 软阴影:边界不清晰,过渡明显
- 本影:一个位置完全看不到光源
- 半影:一个位置可以部分看到光源
- 对于点光源不可能出现软阴影,软阴影一定是光源具有一定大小造成的现象