使用opencv提取连个图像的重叠区域,其本质就是提取两个图像的特征点,然后对两个图像的特征点进行匹配,根据匹配的特征点计算出透视变换矩阵H,然后根据H即可提取出两个图像的重叠区域。这里要注意的是,普通的opencv库没有包含opencv-contrib,无法使用xfeatures2d.hpp里面的SURF、SIFT算法提取图像的特征点。故此,需要自行编译opencv(将opencv-contrib加到动态库中),或者下载别人编译好的opencv。
1、包含opencv-contrib的opencv
win10下vs2019编译的opencv470:https://download.csdn.net/download/a486259/87355761
win10下vs2019编译的opencv453+cuda:
https://download.csdn.net/download/a486259/81328226
2、核心步骤
提取图像重叠区域的关键步骤为,加载图像、提特征点、特征点匹配、计算透视变换矩阵、计算重叠区域、提取重叠区域。
2.1 加载图像
stringstream fmt1, fmt2;
fmt1 << "IMG_20221231_160033.jpg";
Mat left = imread(fmt1.str());//左侧:图片路径
fmt2 << "IMG_20221231_160037.jpg";
Mat right = imread(fmt2.str());//右侧:图片路径
Size msize = { 512, 512 };//left.size();//
resize(left, left, msize);
resize(right, right, msize);
2.2 提取图像特征点
创建surf对象,提取两个图像的特征点和特征描述符
Ptr<SURF>surf; //可以容纳800个特征点
surf = SURF::create(800);//参数 查找的海森矩阵 create 海森矩阵阀值
vector<KeyPoint>key1, key2;//特征点
Mat c, d;//特征点描述符
//提取特征点
surf->detectAndCompute(left, Mat(), key2, d);
surf->detectAndCompute(right, Mat(), key1, c);
2.2 提取图像特征点
使用暴力匹配器匹配两个图像中的特征描述符,匹配结果存入 vector<DMatch>中,然后按照比例提取一定匹配的点
BFMatcher matcher; //暴力匹配器
vector<DMatch>matches;//DMatch 点和点之间的关系
//使用暴力匹配器匹配特征点,找到存来
matcher.match(d, c, matches);
//3、筛选特征点
//排序 从小到大
sort(matches.begin(), matches.end());
//保留最优的特征点对象
vector<DMatch>good_matches;//最优
//设置比例
int ptrPoint = std::max(50, (int)(matches.size() * 0.15));
for (int i = 0; i < ptrPoint; i++)
{
good_matches.push_back(matches[i]);
}
//4、最佳匹配的特征点连成线
Mat outimg;
drawMatches(left, key2, right, key1, good_matches, outimg,
Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
2.3 计算透视变换矩阵
提取vector<DMatch>中已匹配的特征点存入imagepoint1, imagepoint2中计算透视变换矩阵
//5、计算透视变换矩阵
//提取已匹配的特征点
vector<Point2f>imagepoint1, imagepoint2;
for (int i = 0; i < good_matches.size(); i++)
{
imagepoint1.push_back(key1[good_matches[i].trainIdx].pt);
imagepoint2.push_back(key2[good_matches[i].queryIdx].pt);
}
//透视转换
Mat H = findHomography(imagepoint1, imagepoint2, cv::RANSAC);
cout << "H:::" << H << endl;
2.4 计算透视角点
根据H矩阵计算出透视角点,并将透视检点绘制为mask
//定义四个角点坐标。
Point2f obj_corners[4] = { cv::Point(0,0),cv::Point(left.cols, 0), cv::Point(left.cols, left.rows), cv::Point(0, left.rows) };
Point scene_corners2[4]; //在srcImage1上画线
//获取透视变化的角点
for (int i = 0; i < 4; i++)
{
double x = obj_corners[i].x;
double y = obj_corners[i].y;
double Z = 1. / (H.at<double>(2, 0) * x + H.at<double>(2, 1) * y + H.at<double>(2, 2));
double X = (H.at<double>(0, 0) * x + H.at<double>(0, 1) * y + H.at<double>(0, 2)) * Z;
double Y = (H.at<double>(1, 0) * x + H.at<double>(1, 1) * y + H.at<double>(1, 2)) * Z;
scene_corners2[i] = cv::Point(cvRound(X), cvRound(Y));
}
//使用drawContours将透视检点绘制为mask(超出图像大小的区域不可见)
Mat roi = Mat::zeros(left.size(), CV_8UC1);
vector<vector<Point>> contour;
vector<Point> pts;
pts.push_back(scene_corners2[0]);
pts.push_back(scene_corners2[1]);
pts.push_back(scene_corners2[2]);
pts.push_back(scene_corners2[3]);
contour.push_back(pts);
drawContours(roi, contour, 0, Scalar::all(255), -1);
2.5 截取重叠区域
截取两个图像的重叠区域并绘图展示
//截取第一个图的重复区域
Mat dstimg1;
left.copyTo(dstimg1, roi);
Mat roi_left_by = get_by(roi);
//截取第二个图的重复区域
Mat dstimg2 = Mat::zeros(left.size(), CV_8UC3);
warpPerspective(right, dstimg2, H, left.size());
//对roi进行逆变换,得到在右图的重叠区域
Mat roi_right;
warpPerspective(roi, roi_right, H, left.size(), WARP_INVERSE_MAP);
Mat roi_right_by = get_by(roi_right);
imshow("outimg", outimg);
imshows("ss", {left,dstimg1,roi_left_by+ left ,right,dstimg2,roi_right_by+ right }, 3);
waitKey();
3、完整示例
3.1 完整代码
其中Mattool.hpp的内容在3.2章
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <opencv2/calib3d.hpp>
#include <opencv2/imgproc.hpp>
#include "Matutils.hpp"
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
Mat sobel_mat(Mat srcImage) {
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
// 计算x方向的梯度
Sobel(srcImage, grad_x, CV_16S, 1, 0, 3, 1, 0, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
// 计算y方向的梯度
Sobel(srcImage, grad_y, CV_16S, 0, 1, 3, 1, 0, BORDER_DEFAULT);
convertScaleAbs(grad_y, abs_grad_y);
// 合并梯度
Mat dstImage;
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dstImage);
return dstImage;
}
Mat line2red(Mat line) {
vector<cv::Mat> mv;
Mat red_line;
Mat zeros = Mat::zeros(line.size(), CV_8UC1);
//mv.push_back(zeros);
//mv.push_back(zeros);
mv.push_back(line);
mv.push_back(line);
mv.push_back(line);
//将vector内的多个mat合并为一个多通道mat
cv::merge(mv, red_line);
return red_line;
}
Mat get_by(Mat roi) {
Mat roi_left, roi_erode, roi_by;
Mat element = getStructuringElement(MORPH_RECT, Size(7, 7));
roi_left = pad_mat(roi);
morphologyEx(roi_left, roi_erode, MORPH_ERODE, element);
roi_by = roi_left - roi_erode;
roi_by = rm_pad(roi_by);
//cvtColor(roi_by, roi_by, color);
return line2red(roi_by);
}
void test_img() {
stringstream fmt1, fmt2;
fmt1 << "IMG_20221231_160033.jpg";
Mat left = imread(fmt1.str());//左侧:图片路径
fmt2 << "IMG_20221231_160037.jpg";
Mat right = imread(fmt2.str());//右侧:图片路径
Size msize = { 512, 512 };//left.size();//
resize(left, left, msize);
resize(right, right, msize);
//1、创建SURF对象
Ptr<SURF>surf; //可以容纳800个特征点
surf = SURF::create(800);//参数 查找的海森矩阵 create 海森矩阵阀值
vector<KeyPoint>key1, key2;//特征点
Mat c, d;//特征点描述符
//提取特征点
surf->detectAndCompute(left, Mat(), key2, d);
surf->detectAndCompute(right, Mat(), key1, c);
//2、进行特征匹配
BFMatcher matcher; //暴力匹配器
//特征点对比,保存下来
vector<DMatch>matches;//DMatch 点和点之间的关系
//使用暴力匹配器匹配特征点,找到存来
matcher.match(d, c, matches);
//3、筛选特征点
//排序 从小到大
sort(matches.begin(), matches.end());
//保留最优的特征点对象
vector<DMatch>good_matches;//最优
//设置比例
int ptrPoint = std::max(50, (int)(matches.size() * 0.15));
for (int i = 0; i < ptrPoint; i++)
{
good_matches.push_back(matches[i]);
}
//4、最佳匹配的特征点连成线
Mat outimg;
drawMatches(left, key2, right, key1, good_matches, outimg,
Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//5、进行透视变化
//特征点配对
vector<Point2f>imagepoint1, imagepoint2;
for (int i = 0; i < good_matches.size(); i++)
{
imagepoint1.push_back(key1[good_matches[i].trainIdx].pt);
imagepoint2.push_back(key2[good_matches[i].queryIdx].pt);
}
//透视转换
Mat H = findHomography(imagepoint1, imagepoint2, cv::RANSAC);
cout << "H:::" << H << endl;
//根据H矩阵计算出透视角点
//定义四个角点坐标。
Point2f obj_corners[4] = { cv::Point(0,0),cv::Point(left.cols, 0), cv::Point(left.cols, left.rows), cv::Point(0, left.rows) };
Point scene_corners2[4]; //在srcImage1上画线
//获取透视变化的角点
for (int i = 0; i < 4; i++)
{
double x = obj_corners[i].x;
double y = obj_corners[i].y;
double Z = 1. / (H.at<double>(2, 0) * x + H.at<double>(2, 1) * y + H.at<double>(2, 2));
double X = (H.at<double>(0, 0) * x + H.at<double>(0, 1) * y + H.at<double>(0, 2)) * Z;
double Y = (H.at<double>(1, 0) * x + H.at<double>(1, 1) * y + H.at<double>(1, 2)) * Z;
scene_corners2[i] = cv::Point(cvRound(X), cvRound(Y));
}
//使用drawContours将透视检点绘制为mask(超出图像大小的区域不可见)
Mat roi = Mat::zeros(left.size(), CV_8UC1);
vector<vector<Point>> contour;
vector<Point> pts;
pts.push_back(scene_corners2[0]);
pts.push_back(scene_corners2[1]);
pts.push_back(scene_corners2[2]);
pts.push_back(scene_corners2[3]);
contour.push_back(pts);
drawContours(roi, contour, 0, Scalar::all(255), -1);
//截取第一个图的重复区域
Mat dstimg1;
left.copyTo(dstimg1, roi);
Mat roi_left_by = get_by(roi);
//截取第二个图的重复区域
Mat dstimg2 = Mat::zeros(left.size(), CV_8UC3);
warpPerspective(right, dstimg2, H, left.size());
//对roi进行逆变换,得到在右图的重叠区域
Mat roi_right;
warpPerspective(roi, roi_right, H, left.size(), WARP_INVERSE_MAP);
Mat roi_right_by = get_by(roi_right);
imshow("outimg", outimg);
imshows("ss", {left,dstimg1,roi_left_by+ left ,right,dstimg2,roi_right_by+ right }, 3);
waitKey();
}
int main(int argc, char* argv[])
{
test_img();
return 0;
}
3.2 Matutils.hpp
这是进行图像处理中通用的函数库
#ifndef __Matutils__
#define __Matutils__
#pragma once
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>
#include <vector>
#include <io.h>
#include <stdlib.h>
#include <iostream>
#include <string>
using namespace std;
using namespace cv;
//对图像填充黑边
inline Mat pad_mat(Mat img,int pad=10) {
Mat imgWindow = Mat::zeros(img.cols + 2*pad , img.rows + 2 * pad, img.type());
img.copyTo(imgWindow(Rect({ pad ,pad }, img.size())));
return imgWindow;
}
//移除图像填充的黑边
inline Mat rm_pad(Mat img, int pad = 10) {
Size size = { img.cols - 2 * pad , img.rows - 2 * pad };
return img(Rect({ pad ,pad }, size));
}
//图像拼接
inline void multipleImage(vector<Mat> imgVector, Mat& dst, int imgCols, int MAX_PIXEL = 300)
{
//两列图像间的空白区域
int pad = 10;
int imgNum = imgVector.size();
//选择图片最大的一边 将最大的边按比例变为300像素
Size imgOriSize = imgVector[0].size();
int imgMaxPixel = max(imgOriSize.height, imgOriSize.width);
//获取最大像素变为MAX_PIXEL的比例因子
double prop = imgMaxPixel < MAX_PIXEL ? (double)imgMaxPixel / MAX_PIXEL : MAX_PIXEL / (double)imgMaxPixel;
Size imgStdSize(imgOriSize.width * prop, imgOriSize.height * prop); //窗口显示的标准图像的Size
Mat imgStd; //标准图片
Point2i location(0, 0); //坐标点(从0,0开始)
//Mat imgWindow(imgStdSize.height * ((imgNum - 1) / imgCols + 1), imgStdSize.width * imgCols+ pad * imgCols-pad, imgVector[0].type());
int imgRows = (imgNum - 1) / imgCols + 1;
Mat imgWindow = Mat::zeros(imgStdSize.height * imgRows + pad * imgRows - pad, imgStdSize.width * imgCols + pad * imgCols - pad, imgVector[0].type());
for (int i = 0; i < imgNum; i++)
{
location.x = (i % imgCols) * (imgStdSize.width + pad);
location.y = (i / imgCols) * imgStdSize.height;
resize(imgVector[i], imgStd, imgStdSize, prop, prop, INTER_LINEAR); //设置为标准大小
//将imgStd复制到imgWindow的指定区域中
imgStd.copyTo(imgWindow(Rect(location, imgStdSize)));
}
dst = imgWindow;
}
//多图显示
inline void imshows(string title, vector<Mat> imgVector, int imgCols = -1) {
Mat dst;
if (imgCols == -1) {
imgCols = imgVector.size();
}
multipleImage(imgVector, dst, imgCols);
namedWindow(title);
imshow(title, dst);
imwrite(title + ".png", dst);
}
//删除小面积的连通域
inline Mat deleteMinWhiteArea(Mat src, int min_area) {
Mat labels, stats, centroids, img_color, grayImg;
//1、连通域信息统计
int nccomps = connectedComponentsWithStats(
src, //二值图像
labels,
stats,
centroids
);
//2、连通域状态区分
//为每一个连通域初始化颜色表
vector<Vec3b> colors(nccomps);
colors[0] = Vec3b(0, 0, 0); // background pixels remain black.
for (int i = 1; i < nccomps; i++)
{
colors[i] = Vec3b(rand() % 256, rand() % 256, rand() % 256);
//面积阈值筛选
if ((stats.at<int>(i, CC_STAT_AREA) < min_area))
{
//如果连通域面积不合格则置黑
colors[i] = Vec3b(0, 0, 0);
}
}
//3、连通域删除
//按照label值,对不同的连通域进行着色
img_color = Mat::zeros(src.size(), CV_8UC3);
for (int y = 0; y < img_color.rows; y++)
{
int* labels_p = labels.ptr<int>(y);//使用行指针,加速运算
Vec3b* img_color_p = img_color.ptr<Vec3b>(y);//使用行指针,加速运算
for (int x = 0; x < img_color.cols; x++)
{
int label = labels_p[x];//取出label值
CV_Assert(0 <= label && label <= nccomps);
img_color_p[x] = colors[label];//设置颜色
}
}
//return img_color;
//如果是需要二值结果则将img_color进行二值化
cvtColor(img_color, grayImg, COLOR_BGR2GRAY);
threshold(grayImg, grayImg, 1, 255, THRESH_BINARY);
return grayImg;
}
//删除图形中小面积的黑色孔洞
inline Mat deleteMinBlackArea(Mat src, int min_area) {
Mat inv = 255 - src;//颜色取反
Mat res = deleteMinWhiteArea(inv, min_area);
return 255 - res;//颜色取反
}
//找图中topk个连通域
inline bool mypairsort(pair<int, int> i, pair<int, int> j) { return (i.second > j.second); }
inline Mat findTopKArea(Mat srcImage, int topk)
{
Mat temp;
Mat labels;
srcImage.copyTo(temp);
//1. 标记连通域
int n_comps = connectedComponents(temp, labels, 4, CV_16U);
vector<pair<int, int>> histogram_of_labels;
for (int i = 0; i < n_comps; i++)//初始化labels的个数为0
{
histogram_of_labels.push_back({ i,0 });
}
int rows = labels.rows;
int cols = labels.cols;
for (int row = 0; row < rows; row++) //计算每个labels的个数--即连通域的面积
{
for (int col = 0; col < cols; col++)
{
histogram_of_labels.at(labels.at<unsigned short>(row, col)).second += 1;
}
}
//histogram_of_labels.at(0).second = 0; //将背景的labels个数设置为0
//2.对连通域进行排序
std::sort(histogram_of_labels.begin(), histogram_of_labels.end(), mypairsort);
//3. 取前k个连通域的labels id
vector<int> select_labels;
for (int i = 0; i < topk; i++)
{
if (histogram_of_labels[i].first == 0) {
topk += 1;
//如果碰到背景,则跳过,且topk+1
}
else {
select_labels.push_back(histogram_of_labels[i].first);
}
}
//3. 将label id在select_labels的连通域标记为255,并将其他连通域置0
for (int row = 0; row < rows; row++)
{
for (int col = 0; col < cols; col++)
{
int now_label_id = labels.at<unsigned short>(row, col);
if (std::count(select_labels.begin(), select_labels.end(), now_label_id)) {
labels.at<unsigned short>(row, col) = 255;
}
else {
labels.at<unsigned short>(row, col) = 0;
}
}
}
//4. 将图像更改为CV_8U格式
labels.convertTo(labels, CV_8U);
return labels;
}
//获取脊线
inline Mat get_ridge_line(Mat dst, int ksize = 3) {
Mat skeleton, result, open_dst;
Mat kernel = getStructuringElement(MORPH_CROSS, Size(ksize, ksize));
skeleton = Mat::zeros(dst.rows, dst.cols, dst.type());
while (true) {
if (sum(dst)[0] == 0) {
break;
}
morphologyEx(dst, dst, MORPH_ERODE, kernel);//消除毛刺,删除部分连通域
morphologyEx(dst, open_dst, MORPH_OPEN, kernel);
result = dst - open_dst;
skeleton = skeleton + result;
}
return skeleton;
}
#endif
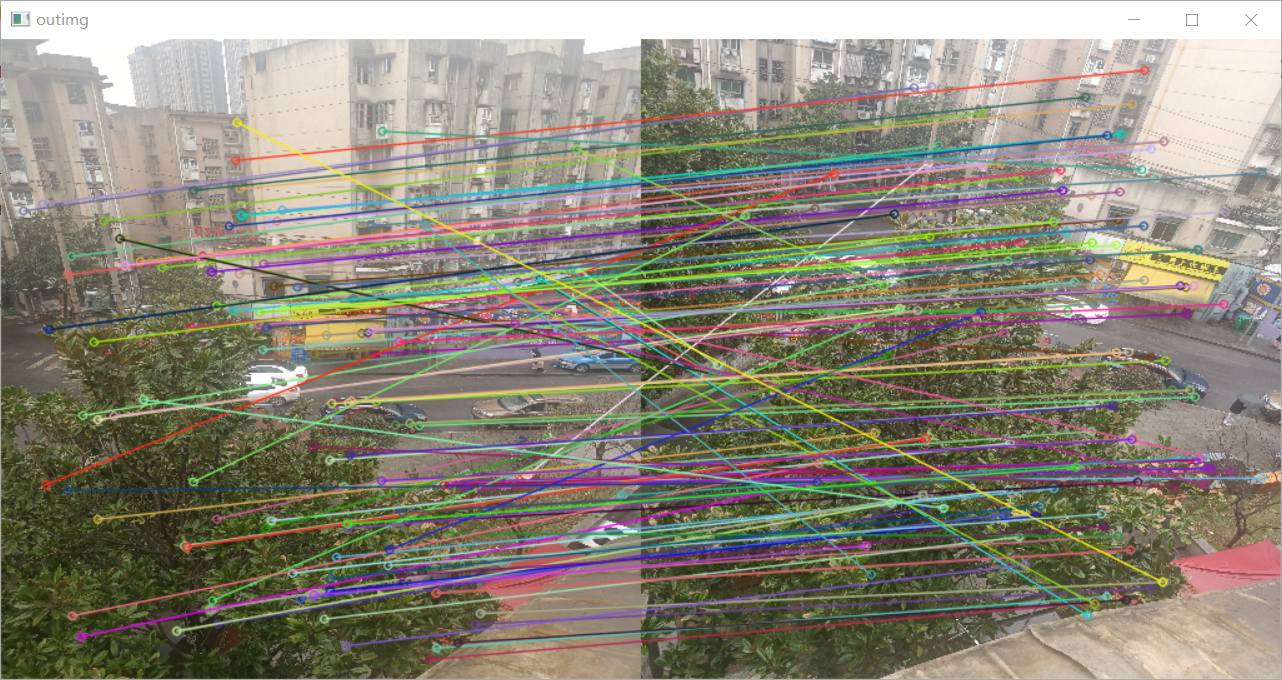
3.3 测试效果
两个图像的特征点匹配关系
算法提取出的重叠区域(中间列),第一例为两个原图,最后一列为重叠区域在原图中的效果。