长短期记忆网络(Long Short-Term Memory Network,LSTM)是一种可以有效缓解长程依赖问题的循环神经网络.LSTM 的特点是引入了一个新的内部状态(Internal State) 和门控机制(Gating Mechanism).不同时刻的内部状态以近似线性的方式进行传递,从而缓解梯度消失或梯度爆炸问题.同时门控机制进行信息筛选,可以有效地增加记忆能力.例如,输入门可以让网络忽略无关紧要的输入信息,遗忘门可以使得网络保留有用的历史信息.在上一节的数字求和任务中,如果模型能够记住前两个非零数字,同时忽略掉一些不重要的干扰信息,那么即时序列很长,模型也有效地进行预测.
LSTM 模型在第 t 步时,循环单元的内部结构如图6.10所示.

图6.10 LSTM网络的循环单元结构
提醒:为了和代码的实现保存一致性,这里使用形状为 (样本数量 × 序列长度 × 特征维度) 的张量来表示一组样本.
6.3.1 模型构建
在本实验中,我们将使用第6.1.2.4节中定义Model_RNN4SeqClass模型,并构建 LSTM 算子.只需要实例化 LSTM 算,并传入Model_RNN4SeqClass模型,就可以用 LSTM 进行数字求和实验
6.3.1.1 LSTM层
LSTM层的代码与SRN层结构相似,只是在SRN层的基础上增加了内部状态、输入门、遗忘门和输出门的定义和计算。这里LSTM层的输出也依然为序列的最后一个位置的隐状态向量。代码实现如下:
import torch import torch.nn.functional as F from torch import nn # 声明LSTM和相关参数 class LSTM(nn.Module): def __init__(self, input_size, hidden_size, Wi_attr=None, Wf_attr=None, Wo_attr=None, Wc_attr=None, Ui_attr=None, Uf_attr=None, Uo_attr=None, Uc_attr=None, bi_attr=None, bf_attr=None, bo_attr=None, bc_attr=None): super(LSTM, self).__init__() self.input_size = input_size self.hidden_size = hidden_size W_i = torch.randn([input_size, hidden_size]) W_f = torch.randn([input_size, hidden_size]) W_o = torch.randn([input_size, hidden_size]) W_c = torch.randn([input_size, hidden_size]) U_i = torch.randn([hidden_size, hidden_size]) U_f = torch.randn([hidden_size, hidden_size]) U_o = torch.randn([hidden_size, hidden_size]) U_c = torch.randn([hidden_size, hidden_size]) b_i = torch.randn([1, hidden_size]) b_f = torch.randn([1, hidden_size]) b_o = torch.randn([1, hidden_size]) b_c = torch.randn([1, hidden_size]) self.W_i = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(W_i, dtype=torch.float32), gain=1.0)) # 初始化模型参数 self.W_f = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(W_f, dtype=torch.float32), gain=1.0)) self.W_o = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(W_o, dtype=torch.float32), gain=1.0)) self.W_c = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(W_c, dtype=torch.float32), gain=1.0)) self.U_i = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(U_i, dtype=torch.float32), gain=1.0)) self.U_f = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(U_f, dtype=torch.float32), gain=1.0)) self.U_o = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(U_o, dtype=torch.float32), gain=1.0)) self.U_c = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(U_c, dtype=torch.float32), gain=1.0)) self.b_i = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(b_i, dtype=torch.float32), gain=1.0)) self.b_f = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(b_f, dtype=torch.float32), gain=1.0)) self.b_o = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(b_o, dtype=torch.float32), gain=1.0)) self.b_c = torch.nn.Parameter( torch.nn.init.xavier_uniform_(torch.as_tensor(b_c, dtype=torch.float32), gain=1.0)) # 初始化状态向量和隐状态向量 def init_state(self, batch_size): hidden_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32) cell_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32) return hidden_state, cell_state # 定义前向计算 def forward(self, inputs, states=None): # inputs: 输入数据,其shape为batch_size x seq_len x input_size batch_size, seq_len, input_size = inputs.shape # 初始化起始的单元状态和隐状态向量,其shape为batch_size x hidden_size if states is None: states = self.init_state(batch_size) hidden_state, cell_state = states # 执行LSTM计算,包括:输入门、遗忘门和输出门、候选内部状态、内部状态和隐状态向量 for step in range(seq_len): # 获取当前时刻的输入数据step_input: 其shape为batch_size x input_size step_input = inputs[:, step, :] # 计算输入门, 遗忘门和输出门, 其shape为:batch_size x hidden_size I_gate = F.sigmoid(torch.matmul(step_input, self.W_i) + torch.matmul(hidden_state, self.U_i) + self.b_i) F_gate = F.sigmoid(torch.matmul(step_input, self.W_f) + torch.matmul(hidden_state, self.U_f) + self.b_f) O_gate = F.sigmoid(torch.matmul(step_input, self.W_o) + torch.matmul(hidden_state, self.U_o) + self.b_o) # 计算候选状态向量, 其shape为:batch_size x hidden_size C_tilde = F.tanh(torch.matmul(step_input, self.W_c) + torch.matmul(hidden_state, self.U_c) + self.b_c) # 计算单元状态向量, 其shape为:batch_size x hidden_size cell_state = F_gate * cell_state + I_gate * C_tilde # 计算隐状态向量,其shape为:batch_size x hidden_size hidden_state = O_gate * F.tanh(cell_state) return hidden_state Wi_attr = torch.tensor([[0.1, 0.2], [0.1, 0.2]]) Wf_attr = torch.tensor([[0.1, 0.2], [0.1, 0.2]]) Wo_attr = torch.tensor([[0.1, 0.2], [0.1, 0.2]]) Wc_attr = torch.tensor([[0.1, 0.2], [0.1, 0.2]]) Ui_attr = torch.tensor([[0.0, 0.1], [0.1, 0.0]]) Uf_attr = torch.tensor([[0.0, 0.1], [0.1, 0.0]]) Uo_attr = torch.tensor([[0.0, 0.1], [0.1, 0.0]]) Uc_attr = torch.tensor([[0.0, 0.1], [0.1, 0.0]]) bi_attr = torch.tensor([[0.1, 0.1]]) bf_attr = torch.tensor([[0.1, 0.1]]) bo_attr = torch.tensor([[0.1, 0.1]]) bc_attr = torch.tensor([[0.1, 0.1]]) lstm = LSTM(2, 2, Wi_attr=Wi_attr, Wf_attr=Wf_attr, Wo_attr=Wo_attr, Wc_attr=Wc_attr, Ui_attr=Ui_attr, Uf_attr=Uf_attr, Uo_attr=Uo_attr, Uc_attr=Uc_attr, bi_attr=bi_attr, bf_attr=bf_attr, bo_attr=bo_attr, bc_attr=bc_attr) inputs = torch.tensor([[[1, 0]]], dtype=torch.float32) hidden_state = lstm(inputs) print(hidden_state)


这里我们可以将自己实现的SRN和Paddle框架内置的SRN返回的结果进行打印展示,实现代码如下。
# 这里创建一个随机数组作为测试数据,数据shape为batch_size x seq_len x input_size batch_size, seq_len, input_size = 8, 20, 32 inputs = torch.randn(size=[batch_size, seq_len, input_size]) # 设置模型的hidden_size hidden_size = 32 torch_lstm = nn.LSTM(input_size, hidden_size) self_lstm = LSTM(input_size, hidden_size) self_hidden_state = self_lstm(inputs) torch_outputs, (torch_hidden_state, torch_cell_state) = torch_lstm(inputs) print("self_lstm hidden_state: ", self_hidden_state.shape) print("torch_lstm outpus:", torch_outputs.shape) print("torch_lstm hidden_state:", torch_hidden_state.shape) print("torch_lstm cell_state:", torch_cell_state.shape)

可以看到,自己实现的LSTM由于没有考虑多层因素,因此没有层次这个维度,因此其输出shape为[8, 32]。同时由于在以上代码使用Paddle内置API实例化LSTM时,默认定义的是1层的单向SRN,因此其shape为[1, 8, 32],同时隐状态向量为[8,20, 32].
接下来,我们可以将自己实现的LSTM与Paddle内置的LSTM在输出值的精度上进行对比 ,在进行实验时,首先定义输入数据inputs,然后将该数据分别传入Paddle内置的LSTM与自己实现的LSTM模型中,最后通过对比两者的隐状态输出向量。
import torch torch.manual_seed(0) # 这里创建一个随机数组作为测试数据,数据shape为batch_size x seq_len x input_size batch_size, seq_len, input_size, hidden_size = 2, 5, 10, 10 inputs = torch.randn(size=[batch_size, seq_len, input_size]) # 设置模型的hidden_size bih_attr = torch.nn.Parameter(torch.zeros([4 * hidden_size, ])) paddle_lstm = nn.LSTM(input_size, hidden_size) paddle_lstm.bias_ih_l0 = bih_attr paddle_lstm.bias_ih_l1 = bih_attr paddle_lstm.bias_ih_l2 = bih_attr paddle_lstm.bias_ih_l3 = bih_attr paddle_lstm.bias_ih_l4 = bih_attr # 获取paddle_lstm中的参数,并设置相应的paramAttr,用于初始化lstm print(paddle_lstm.weight_ih_l0.T.shape) chunked_W = torch.split(paddle_lstm.weight_ih_l0.T, split_size_or_sections=10, dim=-1) chunked_U = torch.split(paddle_lstm.weight_hh_l0.T, split_size_or_sections=10, dim=-1) chunked_b = torch.split(paddle_lstm.bias_hh_l0.T, split_size_or_sections=10, dim=-1) print(chunked_b[0].shape, chunked_b[1].shape, chunked_b[2].shape) Wi_attr = torch.tensor(chunked_W[0]) Wf_attr = torch.tensor(chunked_W[1]) Wc_attr = torch.tensor(chunked_W[2]) Wo_attr = torch.tensor(chunked_W[3]) Ui_attr = torch.tensor(chunked_U[0]) Uf_attr = torch.tensor(chunked_U[1]) Uc_attr = torch.tensor(chunked_U[2]) Uo_attr = torch.tensor(chunked_U[3]) bi_attr = torch.tensor(chunked_b[0]) bf_attr = torch.tensor(chunked_b[1]) bc_attr = torch.tensor(chunked_b[2]) bo_attr = torch.tensor(chunked_b[3]) self_lstm = LSTM(input_size, hidden_size, Wi_attr=Wi_attr, Wf_attr=Wf_attr, Wo_attr=Wo_attr, Wc_attr=Wc_attr, Ui_attr=Ui_attr, Uf_attr=Uf_attr, Uo_attr=Uo_attr, Uc_attr=Uc_attr, bi_attr=bi_attr, bf_attr=bf_attr, bo_attr=bo_attr, bc_attr=bc_attr) # 进行前向计算,获取隐状态向量,并打印展示 self_hidden_state = self_lstm(inputs) paddle_outputs, (paddle_hidden_state, _) = paddle_lstm(inputs) print("paddle SRN:\n", paddle_hidden_state.detach().numpy().squeeze(0)) print("self SRN:\n", self_hidden_state.detach().numpy())

可以看到,两者的输出基本是一致的。另外,还可以进行对比两者在运算速度方面的差异。代码实现如下:
import time # 这里创建一个随机数组作为测试数据,数据shape为batch_size x seq_len x input_size batch_size, seq_len, input_size = 8, 20, 32 inputs = torch.randn(size=[batch_size, seq_len, input_size]) # 设置模型的hidden_size hidden_size = 32 self_lstm = LSTM(input_size, hidden_size) paddle_lstm = nn.LSTM(input_size, hidden_size) # 计算自己实现的SRN运算速度 model_time = 0 for i in range(100): strat_time = time.time() hidden_state = self_lstm(inputs) # 预热10次运算,不计入最终速度统计 if i < 10: continue end_time = time.time() model_time += (end_time - strat_time) avg_model_time = model_time / 90 print('self_lstm speed:', avg_model_time, 's') # 计算Paddle内置的SRN运算速度 model_time = 0 for i in range(100): strat_time = time.time() outputs, (hidden_state, cell_state) = paddle_lstm(inputs) # 预热10次运算,不计入最终速度统计 if i < 10: continue end_time = time.time() model_time += (end_time - strat_time) avg_model_time = model_time / 90 print('paddle_lstm speed:', avg_model_time, 's')
可以看到,由于Paddle框架的LSTM底层采用了C++实现并进行优化,Paddle框架内置的LSTM运行效率远远高于自己实现的LSTM。
6.3.1.2 模型汇总
在本节实验中,我们将使用6.1.2.4的Model_RNN4SeqClass作为预测模型,不同在于在实例化时将传入实例化的LSTM层。
动手联系6.2 在我们手动实现的LSTM算子中,是逐步计算每个时刻的隐状态。请思考如何实现更加高效的LSTM算子。
6.3.2 模型训练
6.3.2.1 训练指定长度的数字预测模型
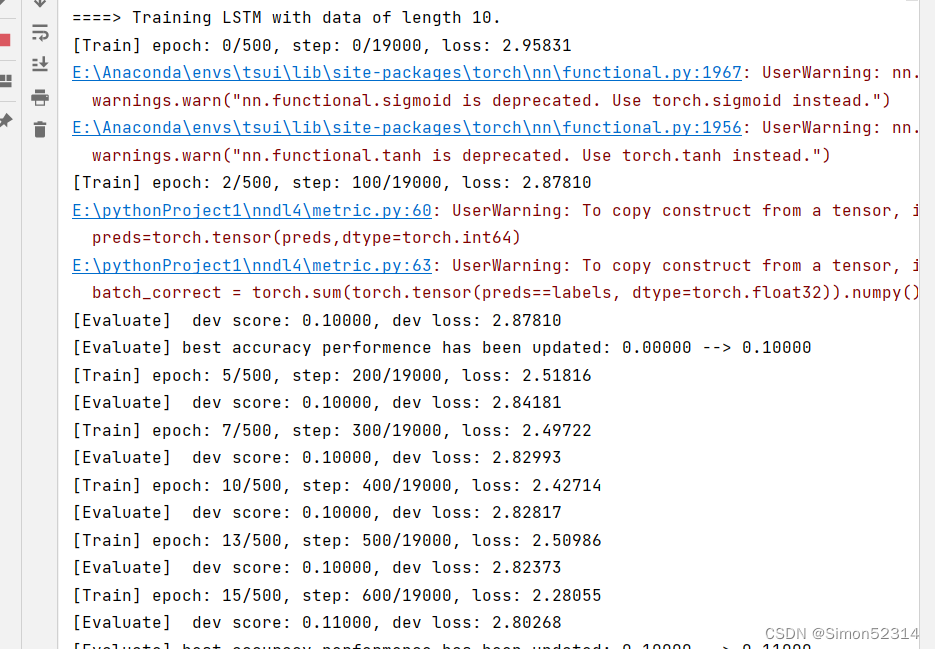
本节将基于RunnerV3类进行训练,首先定义模型训练的超参数,并保证和简单循环网络的超参数一致. 然后定义一个train函数,其可以通过指定长度的数据集,并进行训练. 在train函数中,首先加载长度为length的数据,然后实例化各项组件并创建对应的Runner,然后训练该Runner。同时在本节将使用4.5.4节定义的准确度(Accuracy)作为评估指标,代码实现如下:
import os import random import numpy as np from nndl4.runner import RunnerV3 # 训练轮次 num_epochs = 500 # 学习率 lr = 0.001 # 输入数字的类别数 num_digits = 10 # 将数字映射为向量的维度 input_size = 32 # 隐状态向量的维度 hidden_size = 32 # 预测数字的类别数 num_classes = 19 # 批大小 batch_size = 8 # 模型保存目录 save_dir = "./checkpoints" from torch.utils.data import Dataset,DataLoader import torch class DigitSumDataset(Dataset): def __init__(self, data): self.data = data def __getitem__(self, idx): example = self.data[idx] seq = torch.tensor(example[0], dtype=torch.int64) label = torch.tensor(example[1], dtype=torch.int64) return seq, label def __len__(self): return len(self.data) class Embedding(nn.Module): def __init__(self, num_embeddings, embedding_dim): super(Embedding, self).__init__() self.W = nn.init.xavier_uniform_(torch.empty(num_embeddings, embedding_dim),gain=1.0) def forward(self, inputs): # 根据索引获取对应词向量 embs = self.W[inputs] return embs # emb_layer = Embedding(10, 5) # inputs = torch.tensor([0, 1, 2, 3]) # emb_layer(inputs) # 基于RNN实现数字预测的模型 class Model_RNN4SeqClass(nn.Module): def __init__(self, model, num_digits, input_size, hidden_size, num_classes): super(Model_RNN4SeqClass, self).__init__() # 传入实例化的RNN层,例如SRN self.rnn_model = model # 词典大小 self.num_digits = num_digits # 嵌入向量的维度 self.input_size = input_size # 定义Embedding层 self.embedding = Embedding(num_digits, input_size) # 定义线性层 self.linear = nn.Linear(hidden_size, num_classes) def forward(self, inputs): # 将数字序列映射为相应向量 inputs_emb = self.embedding(inputs) # 调用RNN模型 hidden_state = self.rnn_model(inputs_emb) # 使用最后一个时刻的状态进行数字预测 logits = self.linear(hidden_state) return logits # 可以设置不同的length进行不同长度数据的预测实验 def train(length): print(f"\n====> Training LSTM with data of length {length}.") np.random.seed(0) random.seed(0) # 加载长度为length的数据 data_path = f"./datasets/{length}" train_examples, dev_examples, test_examples = load_data(data_path) train_set, dev_set, test_set = DigitSumDataset(train_examples), DigitSumDataset(dev_examples), DigitSumDataset(test_examples) train_loader = DataLoader(train_set, batch_size=batch_size) dev_loader = DataLoader(dev_set, batch_size=batch_size) test_loader = DataLoader(test_set, batch_size=batch_size) # 实例化模型 base_model = LSTM(input_size, hidden_size) model = Model_RNN4SeqClass(base_model, num_digits, input_size, hidden_size, num_classes) # 指定优化器 optimizer = torch.optim.Adam(lr=lr, params=model.parameters()) # 定义评价指标 metric = Accuracy() # 定义损失函数 loss_fn = torch.nn.CrossEntropyLoss() # 基于以上组件,实例化Runner runner = RunnerV3(model, optimizer, loss_fn, metric) # 进行模型训练 model_save_path = os.path.join(save_dir, f"best_lstm_model_{length}.pdparams") runner.train(train_loader, dev_loader, num_epochs=num_epochs, eval_steps=100, log_steps=100, save_path=model_save_path) return runner
6.3.2.2 多组训练
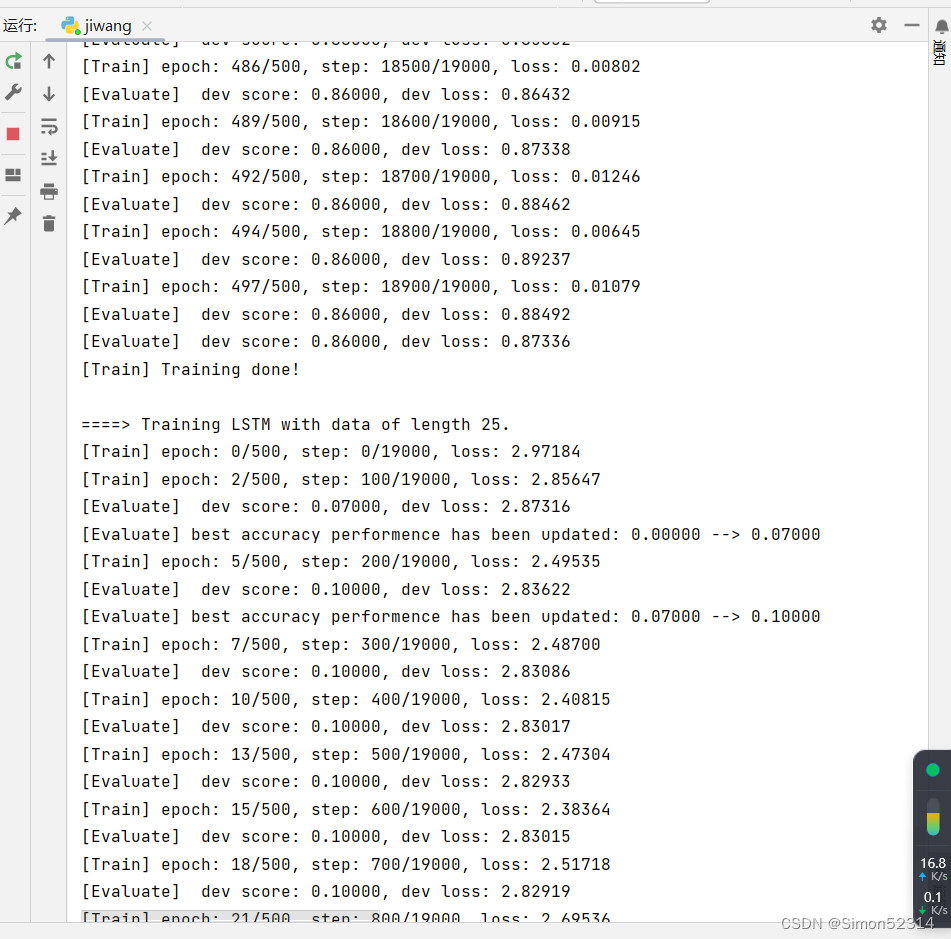
接下来,分别进行数据长度为10, 15, 20, 25, 30, 35的数字预测模型训练实验,训练后的runner保存至runners字典中。
import os import random import torch import numpy as np # 训练轮次 num_epochs = 500 # 学习率 lr = 0.001 # 输入数字的类别数 num_digits = 10 # 将数字映射为向量的维度 input_size = 32 # 隐状态向量的维度 hidden_size = 32 # 预测数字的类别数 num_classes = 19 # 批大小 batch_size = 8 # 模型保存目录 save_dir = "./checkpoints" # 可以设置不同的length进行不同长度数据的预测实验 def train(length): print(f"\n====> Training LSTM with data of length {length}.") np.random.seed(0) random.seed(0) # 加载长度为length的数据 data_path = f"./datasets/{length}" train_examples, dev_examples, test_examples = load_data(data_path) train_set, dev_set, test_set = DigitSumDataset(train_examples), DigitSumDataset(dev_examples), DigitSumDataset(test_examples) train_loader = DataLoader(train_set, batch_size=batch_size) dev_loader = DataLoader(dev_set, batch_size=batch_size) test_loader = DataLoader(test_set, batch_size=batch_size) # 实例化模型 base_model = LSTM(input_size, hidden_size) model = Model_RNN4SeqClass(base_model, num_digits, input_size, hidden_size, num_classes) # 指定优化器 optimizer = torch.optim.Adam(lr=lr, params=model.parameters()) # 定义评价指标 metric = Accuracy() # 定义损失函数 loss_fn = torch.nn.CrossEntropyLoss() # 基于以上组件,实例化Runner runner = RunnerV3(model, optimizer, loss_fn, metric) # 进行模型训练 model_save_path = os.path.join(save_dir, f"best_lstm_model_{length}.pdparams") runner.train(train_loader, dev_loader, num_epochs=num_epochs, eval_steps=100, log_steps=100, save_path=model_save_path) return runner



其中 load_data(data_path) 函数与之前的函数有差别,修改后为
# 加载数据 def load_data(data_path): # 加载训练集 train_examples = [] train_path = os.path.join(data_path, "train.txt") with open(train_path, "r", encoding="utf-8") as f: for line in f.readlines(): # 解析一行数据,将其处理为数字序列seq和标签label items = line.strip().split("\t") seq = [int(i) for i in items[0].split(" ")] label = int(items[1]) train_examples.append((seq, label)) # 加载验证集 dev_examples = [] dev_path = os.path.join(data_path, "dev.txt") with open(dev_path, "r", encoding="utf-8") as f: for line in f.readlines(): # 解析一行数据,将其处理为数字序列seq和标签label items = line.strip().split("\t") seq = [int(i) for i in items[0].split(" ")] label = int(items[1]) dev_examples.append((seq, label)) # 加载测试集 test_examples = [] test_path = os.path.join(data_path, "test.txt") with open(test_path, "r", encoding="utf-8") as f: for line in f.readlines(): # 解析一行数据,将其处理为数字序列seq和标签label items = line.strip().split("\t") seq = [int(i) for i in items[0].split(" ")] label = int(items[1]) test_examples.append((seq, label)) return train_examples, dev_examples, test_examples
6.3.2.3 损失曲线展示
分别画出基于LSTM的各个长度的数字预测模型训练过程中,在训练集和验证集上的损失曲线,代码实现如下:
# 画出训练过程中的损失图 for length in lengths: runner = lstm_runners[length] fig_name = f"./images/6.11_{length}.pdf" plot_training_loss(runner, fig_name, sample_step=100)
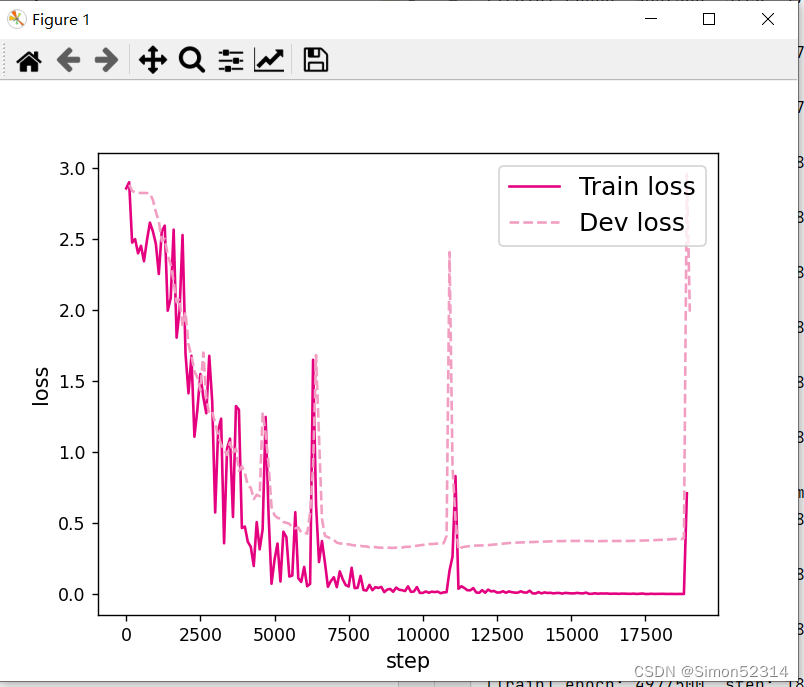

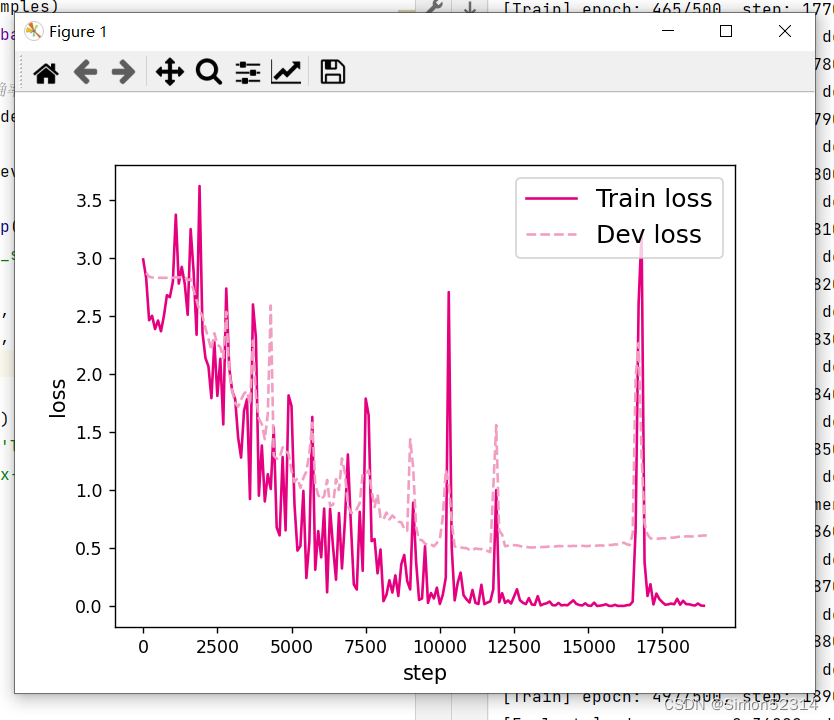
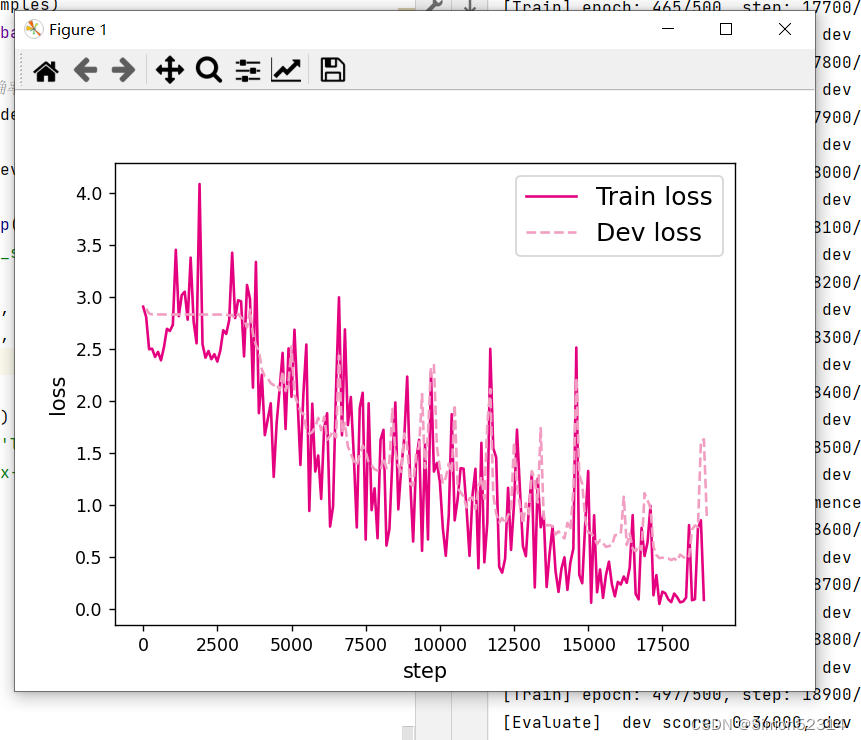
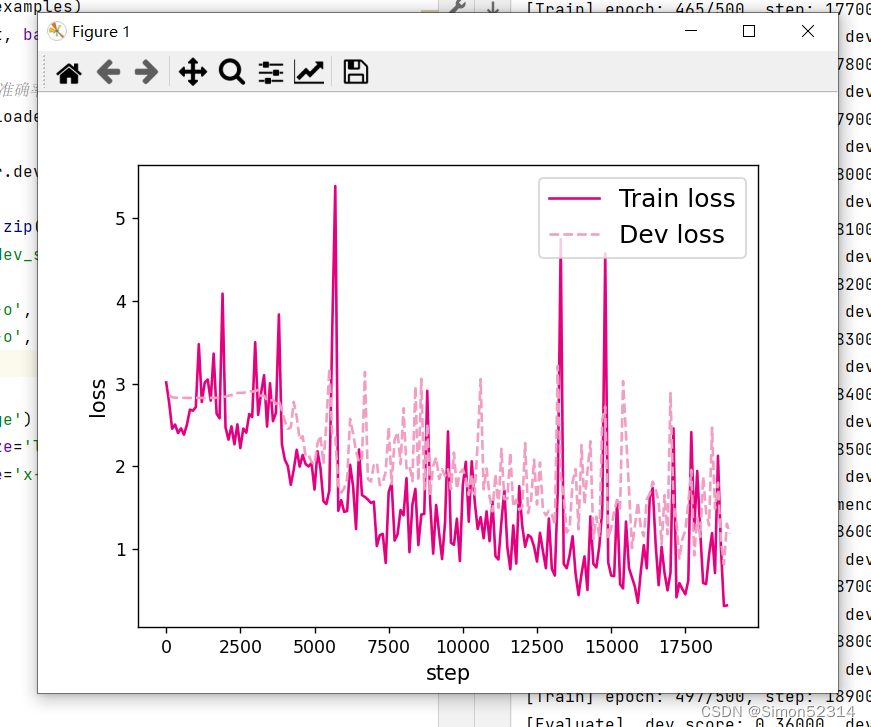

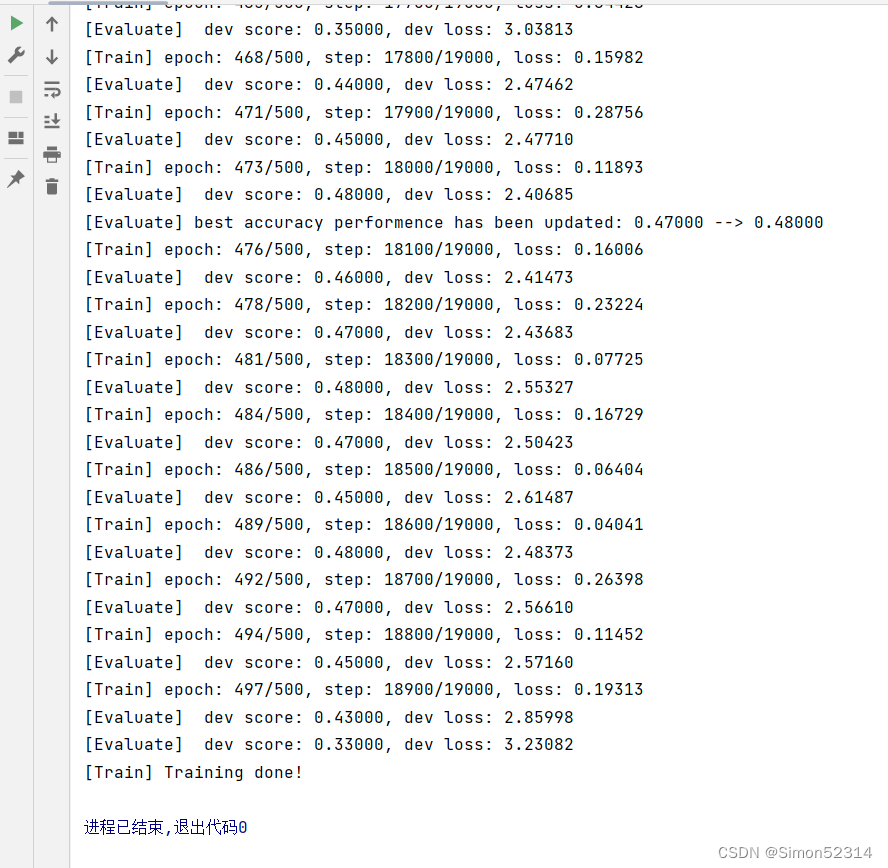
同SRN模型一样,随着序列长度的增加,训练集上的损失逐渐不稳定,验证集上的损失整体趋向于变大,这说明当序列长度增加时,保持长期依赖的能力同样在逐渐变弱. 同RNN的图相比,LSTM模型在序列长度增加时,收敛情况比SRN模型更好。
6.3.3 模型评价
6.3.3.1 在测试集上进行模型评价
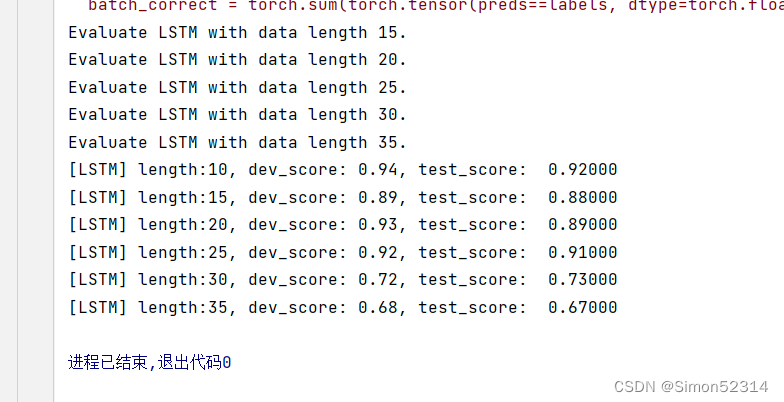
使用测试数据对在训练过程中保存的最好模型进行评价,观察模型在测试集上的准确率. 同时获取模型在训练过程中在验证集上最好的准确率,实现代码如下:
lstm_dev_scores = [] lstm_test_scores = [] for length in lengths: print(f"Evaluate LSTM with data length {length}.") runner = lstm_runners[length] # 加载训练过程中效果最好的模型 model_path = os.path.join(save_dir, f"best_lstm_model_{length}.pdparams") runner.load_model(model_path) # 加载长度为length的数据 data_path = f"./datasets/{length}" train_examples, dev_examples, test_examples = load_data(data_path) test_set = DigitSumDataset(test_examples) test_loader = DataLoader(test_set, batch_size=batch_size) # 使用测试集评价模型,获取测试集上的预测准确率 score, _ = runner.evaluate(test_loader) lstm_test_scores.append(score) lstm_dev_scores.append(max(runner.dev_scores)) for length, dev_score, test_score in zip(lengths, lstm_dev_scores, lstm_test_scores): print(f"[LSTM] length:{length}, dev_score: {dev_score}, test_score: {test_score: .5f}")
6.3.3.2 模型在不同长度的数据集上的准确率变化图
接下来,将SRN和LSTM在不同长度的验证集和测试集数据上的准确率绘制成图片,以方面观察。
import matplotlib.pyplot as plt plt.plot(lengths, lstm_dev_scores, '-o', color='#e8609b', label="LSTM Dev Accuracy") plt.plot(lengths, lstm_test_scores,'-o', color='#000000', label="LSTM Test Accuracy") #绘制坐标轴和图例 plt.ylabel("accuracy", fontsize='large') plt.xlabel("sequence length", fontsize='large') plt.legend(loc='lower left', fontsize='x-large') fig_name = "./images/6.12.pdf" plt.savefig(fig_name) plt.show()

展示了LSTM模型与SRN模型在不同长度数据集上的准确度对比。随着数据集长度的增加,LSTM模型在验证集和测试集上的准确率整体也趋向于降低;同时LSTM模型的准确率显著高于SRN模型,表明LSTM模型保持长期依赖的能力要优于SRN模型.
6.3.3.3 LSTM模型门状态和单元状态的变化
LSTM模型通过门控机制控制信息的单元状态的更新,这里可以观察当LSTM在处理一条数字序列的时候,相应门和单元状态是如何变化的。首先需要对以上LSTM模型实现代码中,定义相应列表进行存储这些门和单元状态在每个时刻的向量。
# 声明LSTM和相关参数 class LSTM(nn.Module): def __init__(self, input_size, hidden_size, Wi_attr=None, Wf_attr=None, Wo_attr=None, Wc_attr=None, Ui_attr=None, Uf_attr=None, Uo_attr=None, Uc_attr=None, bi_attr=None, bf_attr=None, bo_attr=None, bc_attr=None): super(LSTM, self).__init__() self.input_size = input_size self.hidden_size = hidden_size # 初始化模型参数 if Wi_attr==None: Wi=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32) else: Wi = torch.tensor(Wi_attr, dtype=torch.float32) self.W_i = torch.nn.Parameter(Wi) if Wf_attr==None: Wf=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32) else: Wf = torch.tensor(Wf_attr, dtype=torch.float32) self.W_f = torch.nn.Parameter(Wf) if Wo_attr==None: Wo=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32) else: Wo = torch.tensor(Wo_attr, dtype=torch.float32) self.W_o =torch.nn.Parameter(Wo) if Wc_attr==None: Wc=torch.zeros(size=[input_size, hidden_size], dtype=torch.float32) else: Wc = torch.tensor(Wc_attr, dtype=torch.float32) self.W_c = torch.nn.Parameter(Wc) if Ui_attr==None: Ui = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32) else: Ui = torch.tensor(Ui_attr, dtype=torch.float32) self.U_i = torch.nn.Parameter(Ui) if Uf_attr == None: Uf = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32) else: Uf = torch.tensor(Uf_attr, dtype=torch.float32) self.U_f = torch.nn.Parameter(Uf) if Uo_attr == None: Uo = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32) else: Uo = torch.tensor(Uo_attr, dtype=torch.float32) self.U_o = torch.nn.Parameter(Uo) if Uc_attr == None: Uc = torch.zeros(size=[hidden_size, hidden_size], dtype=torch.float32) else: Uc = torch.tensor(Uc_attr, dtype=torch.float32) self.U_c = torch.nn.Parameter(Uc) if bi_attr == None: bi = torch.zeros(size=[1,hidden_size], dtype=torch.float32) else: bi = torch.tensor(bi_attr, dtype=torch.float32) self.b_i = torch.nn.Parameter(bi) if bf_attr == None: bf = torch.zeros(size=[1,hidden_size], dtype=torch.float32) else: bf = torch.tensor(bf_attr, dtype=torch.float32) self.b_f = torch.nn.Parameter(bf) if bo_attr == None: bo = torch.zeros(size=[1,hidden_size], dtype=torch.float32) else: bo = torch.tensor(bo_attr, dtype=torch.float32) self.b_o = torch.nn.Parameter(bo) if bc_attr == None: bc = torch.zeros(size=[1,hidden_size], dtype=torch.float32) else: bc = torch.tensor(bc_attr, dtype=torch.float32) self.b_c = torch.nn.Parameter(bc) # 初始化状态向量和隐状态向量 def init_state(self, batch_size): hidden_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32) cell_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32) return hidden_state, cell_state # 定义前向计算 def forward(self, inputs, states=None): # inputs: 输入数据,其shape为batch_size x seq_len x input_size batch_size, seq_len, input_size = inputs.shape # 初始化起始的单元状态和隐状态向量,其shape为batch_size x hidden_size if states is None: states = self.init_state(batch_size) hidden_state, cell_state = states # 定义相应的门状态和单元状态向量列表 self.Is = [] self.Fs = [] self.Os = [] self.Cs = [] # 初始化状态向量和隐状态向量 cell_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32) hidden_state = torch.zeros(size=[batch_size, self.hidden_size], dtype=torch.float32) # 执行LSTM计算,包括:隐藏门、输入门、遗忘门、候选状态向量、状态向量和隐状态向量 for step in range(seq_len): input_step = inputs[:, step, :] I_gate = F.sigmoid(torch.matmul(input_step, self.W_i) + torch.matmul(hidden_state, self.U_i) + self.b_i) F_gate = F.sigmoid(torch.matmul(input_step, self.W_f) + torch.matmul(hidden_state, self.U_f) + self.b_f) O_gate = F.sigmoid(torch.matmul(input_step, self.W_o) + torch.matmul(hidden_state, self.U_o) + self.b_o) C_tilde = F.tanh(torch.matmul(input_step, self.W_c) + torch.matmul(hidden_state, self.U_c) + self.b_c) cell_state = F_gate * cell_state + I_gate * C_tilde hidden_state = O_gate * F.tanh(cell_state) # 存储门状态向量和单元状态向量 self.Is.append(I_gate.detach().numpy().copy()) self.Fs.append(F_gate.detach().numpy().copy()) self.Os.append(O_gate.detach().numpy().copy()) self.Cs.append(cell_state.detach().numpy().copy()) return hidden_state
接下来,需要使用新的LSTM模型,重新实例化一个runner,本节使用序列长度为10的模型进行此项实验,因此需要加载序列长度为10的模型。
# 实例化模型 base_model = LSTM(input_size, hidden_size) model = Model_RNN4SeqClass(base_model, num_digits, input_size, hidden_size, num_classes) # 指定优化器 optimizer = torch.optim.Adam(lr=lr, params=model.parameters()) # 定义评价指标 metric = Accuracy() # 定义损失函数 loss_fn = torch.nn.CrossEntropyLoss() # 基于以上组件,重新实例化Runner runner = RunnerV3(model, optimizer, loss_fn, metric) length = 10 # 加载训练过程中效果最好的模型 model_path = os.path.join(save_dir, f"best_lstm_model_{length}.pdparams") runner.load_model(model_path)
接下来,给定一条数字序列,并使用数字预测模型进行数字预测,这样便会将相应的门状态和单元状态向量保存至模型中. 然后分别从模型中取出这些向量,并将这些向量进行绘制展示。代码实现如下:
import seaborn as sns import matplotlib.pyplot as plt def plot_tensor(inputs, tensor, save_path, vmin=0, vmax=1): tensor = np.stack(tensor, axis=0) tensor = np.squeeze(tensor, 1).T plt.figure(figsize=(16,6)) # vmin, vmax定义了色彩图的上下界 ax = sns.heatmap(tensor, vmin=vmin, vmax=vmax) ax.set_xticklabels(inputs) ax.figure.savefig(save_path) # 定义模型输入 inputs = [6, 7, 0, 0, 1, 0, 0, 0, 0, 0] X = torch.as_tensor(inputs.copy()) X = X.unsqueeze(0) # 进行模型预测,并获取相应的预测结果 logits = runner.predict(X) predict_label = torch.argmax(logits, dim=-1) print(f"predict result: {predict_label.numpy()[0]}") # 输入门 Is = runner.model.rnn_model.Is plot_tensor(inputs, Is, save_path="./images/6.13_I.pdf") # 遗忘门 Fs = runner.model.rnn_model.Fs plot_tensor(inputs, Fs, save_path="./images/6.13_F.pdf") # 输出门 Os = runner.model.rnn_model.Os plot_tensor(inputs, Os, save_path="./images/6.13_O.pdf") # 单元状态 Cs = runner.model.rnn_model.Cs plot_tensor(inputs, Cs, save_path="./images/6.13_C.pdf", vmin=-5, vmax=5)





总结:
1、多组训练时候报错了,检查是因为load_data(data_path) 函数应该返回三个值,但实际上只返回了两个,所以做实验时,不要看到可以导入的直接无脑导入,要具体情况具体分析




![[Angular] 笔记 10:服务与依赖注入](https://img-blog.csdnimg.cn/direct/c5f4e7938b7a48cd999fdb21660c4127.png)