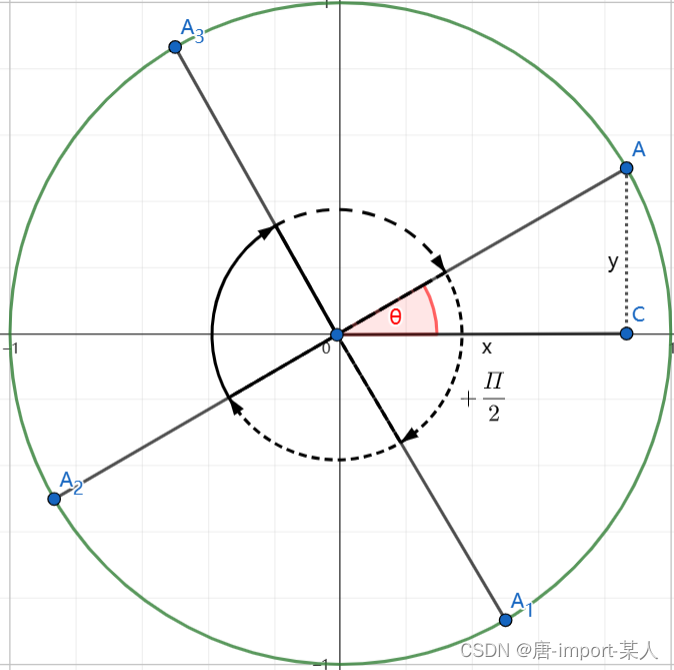
推导原理
①三角形内角和180°
②y值是线段OA投影到周的移动距离,即AC⊥x
③平面几何中的坐标正负
1. 2 k Π 2kΠ 2kΠ
线移动2k+θ后
- 线与x的夹角未发生变化
- 投影x轴位置未变化
- 投影y轴位置未变化
s i n ( 2 k + θ ) = s i n ( θ ) , k ∈ Z sin(2k+θ)=sin(θ),k∈Z sin(2k+θ)=sin(θ),k∈Z
c o s ( 2 k + θ ) = c o s ( θ ) , k ∈ Z cos(2k+θ)=cos(θ),k∈Z cos(2k+θ)=cos(θ),k∈Z
t a n ( 2 k + θ ) = t a n ( θ ) , k ∈ Z tan(2k+θ)=tan(θ),k∈Z tan(2k+θ)=tan(θ),k∈Z
c o t ( 2 k + θ ) = c o t ( θ ) , k ∈ Z cot(2k+θ)=cot(θ),k∈Z cot(2k+θ)=cot(θ),k∈Z
2. 2 k Π + Π 2 2kΠ+\frac{Π}{2} 2kΠ+2Π
线移动 2 k Π + Π 2 + θ 2kΠ+\frac{Π}{2}+θ 2kΠ+2Π+θ后
- 线与x轴夹角变换,即 Π 2 − θ \frac{Π}{2}-θ 2Π−θ
- 投影到x的+轴
- 投影y的-轴
s i n ( Π 2 + θ ) = c o s ( θ ) , k ∈ Z sin(\frac{Π}{2}+θ)=cos(θ),k∈Z sin(2Π+θ)=cos(θ),k∈Z
c o s ( Π 2 + θ ) = s i n ( θ ) , k ∈ Z cos(\frac{Π}{2}+θ)=sin(θ),k∈Z cos(2Π+θ)=sin(θ),k∈Z
t a n ( Π 2 + θ ) = c o t ( θ ) , k ∈ Z tan(\frac{Π}{2}+θ)=cot(θ),k∈Z tan(2Π+θ)=cot(θ),k∈Z
t a n ( Π 2 + θ ) = t a n ( θ ) , k ∈ Z tan(\frac{Π}{2}+θ)=tan(θ),k∈Z tan(2Π+θ)=tan(θ),k∈Z
3. 2 k Π + Π 2kΠ+Π 2kΠ+Π
线移动 2 k Π + Π 2kΠ+Π 2kΠ+Π后
- 线与x轴发生夹角未发生变换
- 投影x的-轴
- 投影y的-轴
s i n ( 2 k Π + Π + θ ) = s i n ( θ ) , k ∈ Z sin(2kΠ+Π+θ)=sin(θ),k∈Z sin(2kΠ+Π+θ)=sin(θ),k∈Z
c o s ( 2 k Π + Π + θ ) = − c o s ( θ ) , k ∈ Z cos(2kΠ+Π+θ)=-cos(θ),k∈Z cos(2kΠ+Π+θ)=−cos(θ),k∈Z
t a n ( 2 k Π + Π + θ ) = − t a n ( θ ) , k ∈ Z tan(2kΠ+Π+θ)=-tan(θ),k∈Z tan(2kΠ+Π+θ)=−tan(θ),k∈Z
c o t ( 2 k Π + Π + θ ) = − c o t ( θ ) , k ∈ Z cot(2kΠ+Π+θ)=-cot(θ),k∈Z cot(2kΠ+Π+θ)=−cot(θ),k∈Z
4. 2 k Π + 3 Π 2 2kΠ+\frac{3Π}{2} 2kΠ+23Π
线移动 2 k Π + 3 Π 2 2kΠ+\frac{3Π}{2} 2kΠ+23Π后
- 线与x轴发生夹角未生变换,即 Π 2 − θ \frac{Π}{2}-θ 2Π−θ
- 投影x的-轴
- 投影y的+轴
s i n ( 2 k Π + 3 Π 2 + θ ) = − c o s ( θ ) , k ∈ Z sin(2kΠ+\frac{3Π}{2}+θ)=-cos(θ),k∈Z sin(2kΠ+23Π+θ)=−cos(θ),k∈Z
c o s ( 2 k Π + 3 Π 2 + θ ) = s i n ( θ ) , k ∈ Z cos(2kΠ+\frac{3Π}{2}+θ)=sin(θ),k∈Z cos(2kΠ+23Π+θ)=sin(θ),k∈Z
t a n ( 2 k Π + 3 Π 2 + θ ) = − c o t ( θ ) , k ∈ Z tan(2kΠ+\frac{3Π}{2}+θ)=-cot(θ),k∈Z tan(2kΠ+23Π+θ)=−cot(θ),k∈Z
c o t ( 2 k Π + 3 Π 2 + θ ) = − t a n ( θ ) , k ∈ Z cot(2kΠ+\frac{3Π}{2}+θ)=-tan(θ),k∈Z cot(2kΠ+23Π+θ)=−tan(θ),k∈Z
5.-θ
-θ表示线移动角度由正方向变换正方向移动
s
i
n
(
−
θ
)
=
−
s
i
n
(
θ
)
sin(-θ)=-sin(θ)
sin(−θ)=−sin(θ)
c
o
s
(
−
θ
)
=
c
o
s
(
θ
)
cos(-θ)=cos(θ)
cos(−θ)=cos(θ)
t
a
n
(
−
θ
)
=
−
t
a
n
(
θ
)
tan(-θ)=-tan(θ)
tan(−θ)=−tan(θ)
c
o
t
(
−
θ
)
=
−
c
o
t
(
θ
)
cot(-θ)=-cot(θ)
cot(−θ)=−cot(θ)