STM32/STM8资源节约主义编程方式
在小资源芯片进行代码设计时,如STM32C0系列,STM8系列,因为官方库本身要包含各种场景应用特征的支持,所以会有一些冗余的代码占用更多FLASH空间。当需要实现资源占用最简化设计方式时,可以采用如下方式:
- 启动一个1ms周期定时器,每个中断进行32位计数值的累加计数
- 实现指令方式微秒延时函数,原理参考《STM32 HAL us delay(微秒延时)的指令延时实现方式及优化》,此方法适用于所有MCU的指令方式微秒延时实现,不限于STM32/STM8。
- 关闭1ms周期定时器。
- 用微秒延时函数进行各种接口GPIO时序模拟,如I2C, SPI等等。从而不需要用到官方接口库,实现最简化代码设计。一旦实现了微秒延时函数,用微秒延时函数设计实现的STM32接口协议函数,可以移过来用于STM8。
- 当需要实现某种更准确的时序要求时,可以将一个或多个TIM启动,配合微秒延时函数实现各种时序设计。
这里以STM8S103F3P6为例,介绍
*模拟UART TX发送的代码,不用到TIM资源
*模拟UART TX/RX环回测试代码,使用TIM资源
以及例程下载
STM8S103F3P6 UART TX ONLY模拟协议代码
基于微秒延时函数不采用定时器的UART时序模拟原理介绍参考:《STM32 GPIO模拟UART串口:最简延时方式》,这里的逻辑为:
- 用TIM4实现1ms周期计数
- 实现微秒延时函数
- 关闭TIM4
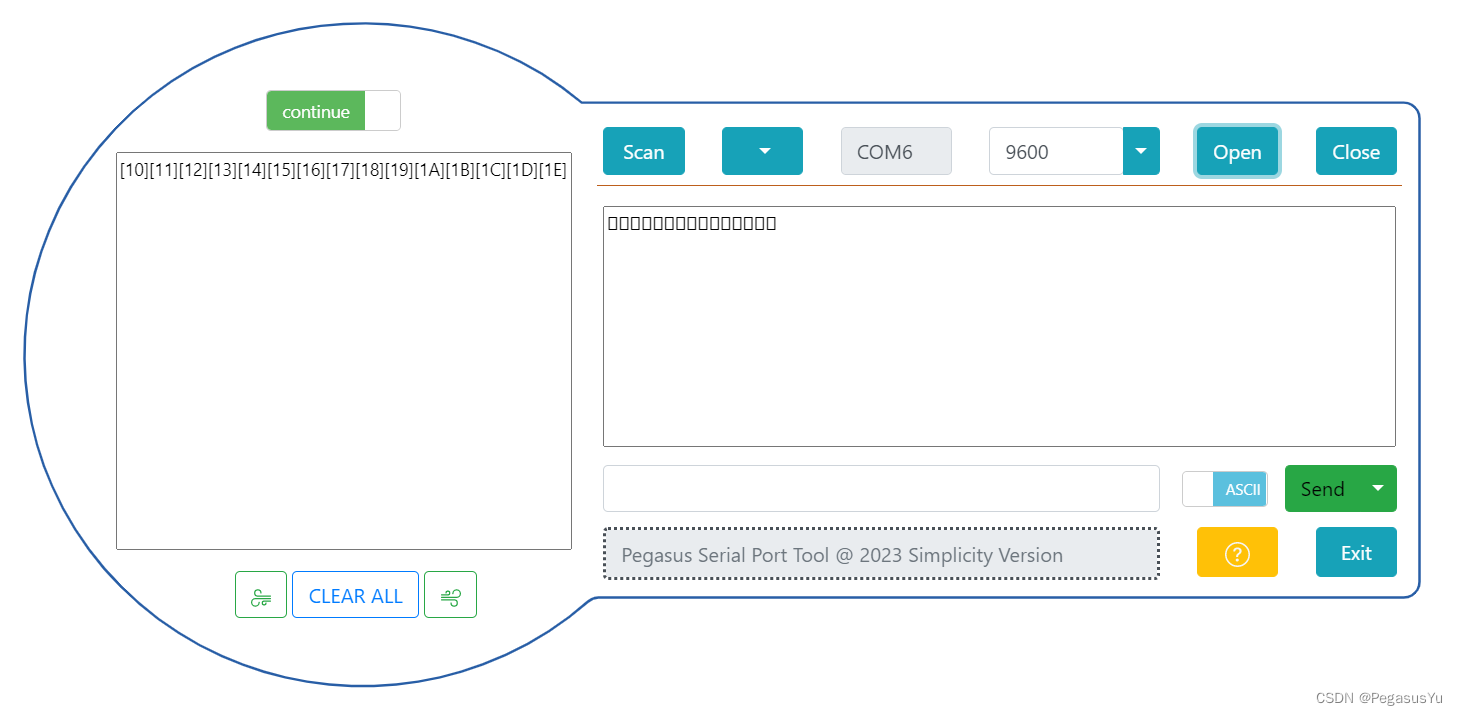
- 用微秒延时函数实现9600波特率UART的TX发送功能,循环发送出增加的数值
- 这个代码在微秒延时函数实现后关闭了1ms周期计数的TIM4,因此后续运行没有用到任何TIM,也没有用到其它接口库。
完整的实现代码在两个文件内。这里PB5为LED管脚,PC7为UART TX管脚。
stm8s_it.c里的代码,主要是实现1ms周期中断的计数功能:
/**
******************************************************************************
* @file stm8s_it.c
* @author MCD Application Team
* @version V2.1.0
* @date 18-November-2011
* @brief Main Interrupt Service Routines.
* This file provides template for all peripherals interrupt service
* routine.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s_it.h"
extern uint8_t i;
/** @addtogroup Template_Project
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/* Public functions ----------------------------------------------------------*/
#ifdef _COSMIC_
/**
* @brief Dummy Interrupt routine
* @par Parameters:
* None
* @retval
* None
*/
INTERRUPT_HANDLER(NonHandledInterrupt, 25)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*_COSMIC_*/
/**
* @brief TRAP Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER_TRAP(TRAP_IRQHandler)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Top Level Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TLI_IRQHandler, 0)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Auto Wake Up Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(AWU_IRQHandler, 1)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Clock Controller Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(CLK_IRQHandler, 2)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTA Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTA_IRQHandler, 3)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTB Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTB_IRQHandler, 4)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTC Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTC_IRQHandler, 5)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTD Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTD_IRQHandler, 6)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTE Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTE_IRQHandler, 7)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#ifdef STM8S903
/**
* @brief External Interrupt PORTF Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTF_IRQHandler, 8)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S903*/
#if defined (STM8S208) || defined (STM8AF52Ax)
/**
* @brief CAN RX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(CAN_RX_IRQHandler, 8)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief CAN TX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(CAN_TX_IRQHandler, 9)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 || STM8AF52Ax */
/**
* @brief SPI Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(SPI_IRQHandler, 10)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer1 Update/Overflow/Trigger/Break Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM1_UPD_OVF_TRG_BRK_IRQHandler, 11)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer1 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM1_CAP_COM_IRQHandler, 12)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#ifdef STM8S903
/**
* @brief Timer5 Update/Overflow/Break/Trigger Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM5_UPD_OVF_BRK_TRG_IRQHandler, 13)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer5 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM5_CAP_COM_IRQHandler, 14)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S208, STM8S207, STM8S105 or STM8S103 or STM8AF62Ax or STM8AF52Ax or STM8AF626x */
/**
* @brief Timer2 Update/Overflow/Break Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM2_UPD_OVF_BRK_IRQHandler, 13)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer2 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM2_CAP_COM_IRQHandler, 14)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S903*/
#if defined (STM8S208) || defined(STM8S207) || defined(STM8S007) || defined(STM8S105) || \
defined(STM8S005) || defined (STM8AF62Ax) || defined (STM8AF52Ax) || defined (STM8AF626x)
/**
* @brief Timer3 Update/Overflow/Break Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM3_UPD_OVF_BRK_IRQHandler, 15)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer3 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM3_CAP_COM_IRQHandler, 16)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208, STM8S207 or STM8S105 or STM8AF62Ax or STM8AF52Ax or STM8AF626x */
#if defined (STM8S208) || defined(STM8S207) || defined(STM8S007) || defined(STM8S103) || \
defined(STM8S003) || defined (STM8AF62Ax) || defined (STM8AF52Ax) || defined (STM8S903)
/**
* @brief UART1 TX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART1_TX_IRQHandler, 17)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief UART1 RX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART1_RX_IRQHandler, 18)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 or STM8S207 or STM8S103 or STM8S903 or STM8AF62Ax or STM8AF52Ax */
/**
* @brief I2C Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(I2C_IRQHandler, 19)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#if defined(STM8S105) || defined(STM8S005) || defined (STM8AF626x)
/**
* @brief UART2 TX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART2_TX_IRQHandler, 20)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief UART2 RX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART2_RX_IRQHandler, 21)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /* STM8S105 or STM8AF626x */
#if defined(STM8S207) || defined(STM8S007) || defined(STM8S208) || defined (STM8AF52Ax) || defined (STM8AF62Ax)
/**
* @brief UART3 TX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART3_TX_IRQHandler, 20)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief UART3 RX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART3_RX_IRQHandler, 21)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 or STM8S207 or STM8AF52Ax or STM8AF62Ax */
#if defined(STM8S207) || defined(STM8S007) || defined(STM8S208) || defined (STM8AF52Ax) || defined (STM8AF62Ax)
/**
* @brief ADC2 interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(ADC2_IRQHandler, 22)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S105, STM8S103 or STM8S903 or STM8AF626x */
/**
* @brief ADC1 interrupt routine.
* @par Parameters:
* None
* @retval
* None
*/
INTERRUPT_HANDLER(ADC1_IRQHandler, 22)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 or STM8S207 or STM8AF52Ax or STM8AF62Ax */
#ifdef STM8S903
/**
* @brief Timer6 Update/Overflow/Trigger Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM6_UPD_OVF_TRG_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S208, STM8S207, STM8S105 or STM8S103 or STM8AF52Ax or STM8AF62Ax or STM8AF626x */
/**
* @brief Timer4 Update/Overflow Interrupt routine.
* @param None
* @retval None
*/
__IO uint32_t uwTick = 0;
INTERRUPT_HANDLER(TIM4_UPD_OVF_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
uwTick++;
TIM4_ClearITPendingBit(TIM4_IT_UPDATE);
}
#endif /*STM8S903*/
/**
* @brief Eeprom EEC Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EEPROM_EEC_IRQHandler, 24)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
main.c里的代码:
/**
******************************************************************************
* @file Project/main.c
* @author MCD Application Team
* @version V2.1.0
* @date 18-November-2011
* @brief Main program body
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s.h"
#include "stm8s_clk.h"
/* Private defines -----------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/* Private defines -----------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
void Init_GPIO(void)
{
GPIO_Init(GPIOB, GPIO_PIN_5, GPIO_MODE_OUT_PP_LOW_FAST);//LED
GPIO_Init(GPIOC, GPIO_PIN_7, GPIO_MODE_OUT_PP_HIGH_FAST);//UART_TX
GPIO_Init(GPIOC, GPIO_PIN_6, GPIO_MODE_IN_PU_NO_IT); //UART_RX
GPIO_WriteHigh(GPIOC, GPIO_PIN_7);
}
void Init_Timer4(void)
{
TIM4_TimeBaseInit(TIM4_PRESCALER_128, 125);
/* Clear TIM4 update flag */
TIM4_ClearFlag(TIM4_FLAG_UPDATE);
/* Enable update interrupt */
TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE);
TIM4_Cmd(ENABLE);
}
/*Start of Pegasus Segment*/
extern __IO uint32_t uwTick;
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = uwTick+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = uwTick;
PY_Delay_us_t(1000000) ;
secondms = uwTick;
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
#define GPIO_OUTPUT_EXEC_DELAY_us 40
#define BaudRate_us 104 //for 9600bps
#define RD (GPIO_ReadInputPin(GPIOC, GPIO_PIN_6)==GPIO_PIN_6)?1:0
#define TDL GPIO_WriteLow(GPIOC, GPIO_PIN_7)
#define TDH GPIO_WriteHigh(GPIOC, GPIO_PIN_7)
#define buff_len 128
__IO uint8_t tx_status = 0;
__IO uint8_t rx_status = 0;
__IO uint8_t txd[buff_len];
__IO uint8_t rxd[buff_len];
__IO uint32_t txd_index=0;
__IO uint32_t rxd_index=0;
__IO uint8_t bytebit=0;
__IO uint8_t bytebit_s=0;
__IO uint8_t data=0;
/*Enf of Pegasus Segment*/
void main(void)
{
/* Config internal high speed clock as 16MHz main clock */
//CLK_HSICmd(ENABLE);
CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV1);
CLK_HSICmd(ENABLE);
CLK_ClockSwitchConfig(CLK_SWITCHMODE_AUTO, CLK_SOURCE_HSI, DISABLE, CLK_CURRENTCLOCKSTATE_DISABLE);
CLK_ClockSwitchCmd(ENABLE);
Init_GPIO();
Init_Timer4();
enableInterrupts();
for(uint32_t j=0; j<0xffff; j++) ; //for clock stability
PY_usDelayTest();
PY_usDelayOptimize(); //get us delay function
disableInterrupts();
TIM4_Cmd(DISABLE); //no use of TIM4 now
while (1)
{
PY_Delay_us_t(1000000);
GPIO_WriteReverse(GPIOB, GPIO_PIN_5); //Flash LED
tx_status = 1;
data++;
switch(tx_status)
{
case 1:{//start bit
bytebit = data;
TDL;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
tx_status ++;
}
case 2:{//bit 1
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
bytebit >>= 1;
tx_status ++;
}
case 3:{//bit 2
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
bytebit >>= 1;
tx_status ++;
}
case 4:{//bit 3
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
bytebit >>= 1;
tx_status ++;
}
case 5:{//bit 4
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
bytebit >>= 1;
tx_status ++;
}
case 6:{//bit 5
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
bytebit >>= 1;
tx_status ++;
}
case 7:{//bit 6
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
bytebit >>= 1;
tx_status ++;
}
case 8:{//bit 7
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
bytebit >>= 1;
tx_status ++;
}
case 9:{//bit 8
if((bytebit&0x01)==0) TDL;
else TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
tx_status ++;
}
case 10:{//stop bit
TDH;
PY_Delay_us_t(BaudRate_us-GPIO_OUTPUT_EXEC_DELAY_us);
tx_status = 0;
rx_status = 0;
}
default:break;
}
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval : None
*/
void assert_failed(u8* file, u32 line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
代码下载后测试效果:
STM8S103F3P6 UART TX/RX 模拟协议代码及环回测试
基于采用定时器的UART时序模拟介绍参考:《STM32 GPIO模拟UART串口:外部时钟及TIM方式》,注意STM8应用场景主要采用内部时钟模式,所以STM8的内部时钟稳定度尚可,配合对接收时序采样时刻的调整,可以不采用外部时钟而实现9600波特率UART稳定收发。这里的逻辑为:
- 用TIM4实现1ms周期计数
- 实现微秒延时函数
- 关闭TIM4
- 重配TIM4和启用为52us周期中断(9600波特率对应104us位宽)
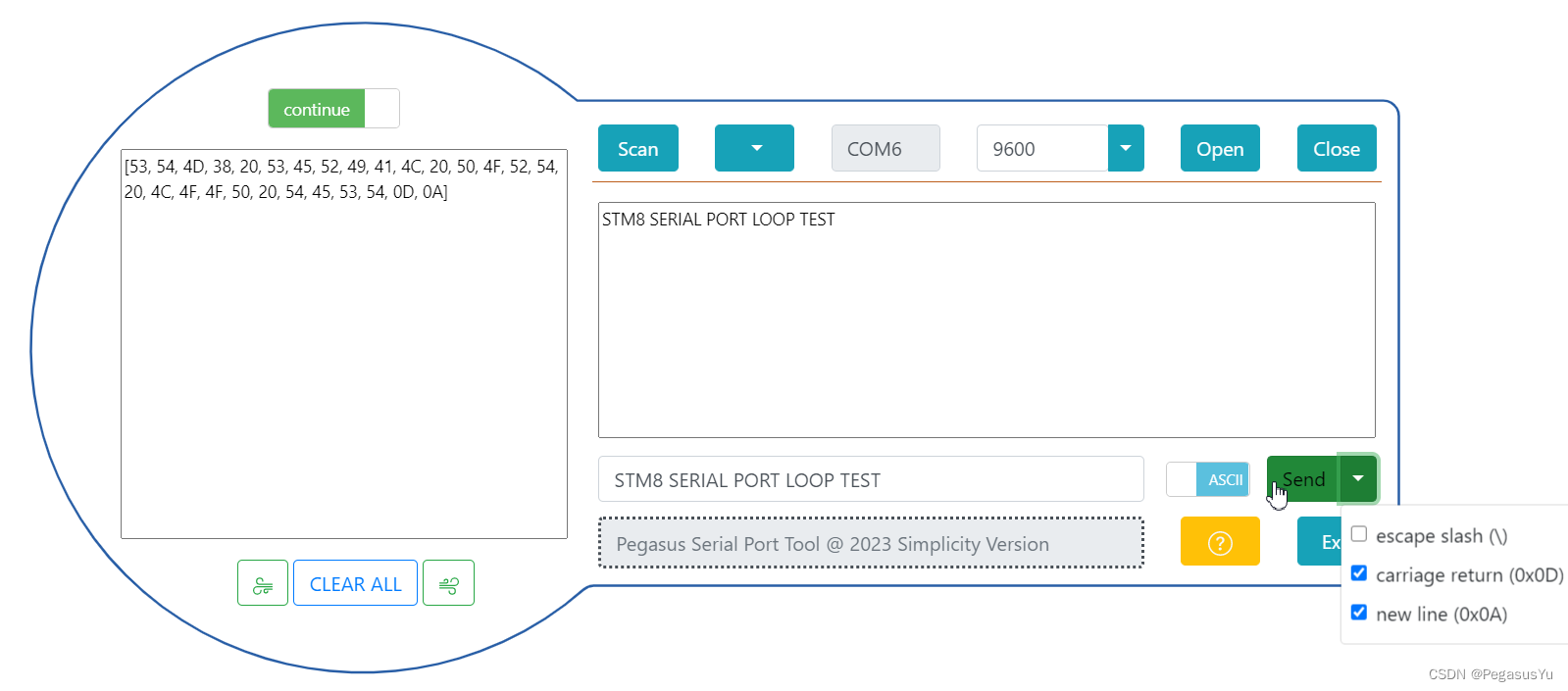
- 实现UART接收到发送的环回功能
完整的实现代码在两个文件内。这里PB5为LED管脚,PC7为UART TX管脚,PC6为RX管脚。
stm8s_it.c里的代码:
/**
******************************************************************************
* @file stm8s_it.c
* @author MCD Application Team
* @version V2.1.0
* @date 18-November-2011
* @brief Main Interrupt Service Routines.
* This file provides template for all peripherals interrupt service
* routine.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s_it.h"
extern uint8_t i;
/** @addtogroup Template_Project
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/* Public functions ----------------------------------------------------------*/
#ifdef _COSMIC_
/**
* @brief Dummy Interrupt routine
* @par Parameters:
* None
* @retval
* None
*/
INTERRUPT_HANDLER(NonHandledInterrupt, 25)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*_COSMIC_*/
/**
* @brief TRAP Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER_TRAP(TRAP_IRQHandler)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Top Level Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TLI_IRQHandler, 0)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Auto Wake Up Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(AWU_IRQHandler, 1)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Clock Controller Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(CLK_IRQHandler, 2)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTA Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTA_IRQHandler, 3)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTB Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTB_IRQHandler, 4)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTC Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTC_IRQHandler, 5)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTD Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTD_IRQHandler, 6)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief External Interrupt PORTE Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTE_IRQHandler, 7)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#ifdef STM8S903
/**
* @brief External Interrupt PORTF Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EXTI_PORTF_IRQHandler, 8)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S903*/
#if defined (STM8S208) || defined (STM8AF52Ax)
/**
* @brief CAN RX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(CAN_RX_IRQHandler, 8)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief CAN TX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(CAN_TX_IRQHandler, 9)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 || STM8AF52Ax */
/**
* @brief SPI Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(SPI_IRQHandler, 10)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer1 Update/Overflow/Trigger/Break Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM1_UPD_OVF_TRG_BRK_IRQHandler, 11)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer1 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM1_CAP_COM_IRQHandler, 12)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#ifdef STM8S903
/**
* @brief Timer5 Update/Overflow/Break/Trigger Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM5_UPD_OVF_BRK_TRG_IRQHandler, 13)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer5 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM5_CAP_COM_IRQHandler, 14)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S208, STM8S207, STM8S105 or STM8S103 or STM8AF62Ax or STM8AF52Ax or STM8AF626x */
/**
* @brief Timer2 Update/Overflow/Break Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM2_UPD_OVF_BRK_IRQHandler, 13)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer2 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM2_CAP_COM_IRQHandler, 14)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S903*/
#if defined (STM8S208) || defined(STM8S207) || defined(STM8S007) || defined(STM8S105) || \
defined(STM8S005) || defined (STM8AF62Ax) || defined (STM8AF52Ax) || defined (STM8AF626x)
/**
* @brief Timer3 Update/Overflow/Break Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM3_UPD_OVF_BRK_IRQHandler, 15)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief Timer3 Capture/Compare Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM3_CAP_COM_IRQHandler, 16)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208, STM8S207 or STM8S105 or STM8AF62Ax or STM8AF52Ax or STM8AF626x */
#if defined (STM8S208) || defined(STM8S207) || defined(STM8S007) || defined(STM8S103) || \
defined(STM8S003) || defined (STM8AF62Ax) || defined (STM8AF52Ax) || defined (STM8S903)
/**
* @brief UART1 TX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART1_TX_IRQHandler, 17)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief UART1 RX Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART1_RX_IRQHandler, 18)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 or STM8S207 or STM8S103 or STM8S903 or STM8AF62Ax or STM8AF52Ax */
/**
* @brief I2C Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(I2C_IRQHandler, 19)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#if defined(STM8S105) || defined(STM8S005) || defined (STM8AF626x)
/**
* @brief UART2 TX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART2_TX_IRQHandler, 20)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief UART2 RX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART2_RX_IRQHandler, 21)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /* STM8S105 or STM8AF626x */
#if defined(STM8S207) || defined(STM8S007) || defined(STM8S208) || defined (STM8AF52Ax) || defined (STM8AF62Ax)
/**
* @brief UART3 TX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART3_TX_IRQHandler, 20)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @brief UART3 RX interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(UART3_RX_IRQHandler, 21)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 or STM8S207 or STM8AF52Ax or STM8AF62Ax */
#if defined(STM8S207) || defined(STM8S007) || defined(STM8S208) || defined (STM8AF52Ax) || defined (STM8AF62Ax)
/**
* @brief ADC2 interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(ADC2_IRQHandler, 22)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S105, STM8S103 or STM8S903 or STM8AF626x */
/**
* @brief ADC1 interrupt routine.
* @par Parameters:
* None
* @retval
* None
*/
INTERRUPT_HANDLER(ADC1_IRQHandler, 22)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*STM8S208 or STM8S207 or STM8AF52Ax or STM8AF62Ax */
#ifdef STM8S903
/**
* @brief Timer6 Update/Overflow/Trigger Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM6_UPD_OVF_TRG_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S208, STM8S207, STM8S105 or STM8S103 or STM8AF52Ax or STM8AF62Ax or STM8AF626x */
/**
* @brief Timer4 Update/Overflow Interrupt routine.
* @param None
* @retval None
*/
__IO uint32_t uwTick = 0;
extern __IO uint8_t Int_Type;
#define TDL GPIO_WriteLow(GPIOC, GPIO_PIN_7)
#define TDH GPIO_WriteHigh(GPIOC, GPIO_PIN_7)
#define RBIT (GPIO_ReadInputPin(GPIOC, GPIO_PIN_6)==GPIO_PIN_6)?1:0;
#define buff_len 128
uint8_t txd[buff_len];
uint8_t rxd[buff_len];
uint32_t txd_index=0;
uint32_t rxd_index=0;
#define sampling_timing_opt_us 1
uint8_t half_period_ctl = 0;
INTERRUPT_HANDLER(TIM4_UPD_OVF_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
extern uint8_t bytebit;
extern uint8_t bytebit_s;
extern uint8_t tx_status;
extern uint8_t rx_status;
if(Int_Type == 0)
{
uwTick++;
}
else
{
switch(rx_status)
{
case 0:{
bytebit = RBIT;
if(bytebit==0)
{
if(half_period_ctl==0) half_period_ctl = 1;
else
{
half_period_ctl = 0;
rx_status = 1;
}
}
break;
}
case 1:{//start bit
rx_status ++;
rxd[rxd_index] = 0;
break;
}
case 2:{//bit 1
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 4:{//bit 2
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 6:{//bit 3
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 8:{//bit 4
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 10:{//bit 5
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 12:{//bit 6
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 14:{//bit 7
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 16:{//bit 8
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
(bytebit==0)?(rxd[rxd_index]>>=1):(rxd[rxd_index]=(rxd[rxd_index]>>1)|0x80);
rx_status ++;
break;
}
case 18:{//stop bit
//PY_Delay_us_t(sampling_timing_opt_us);
bytebit = RBIT;
if(bytebit==1)
{
bytebit_s = rxd[rxd_index];
tx_status = 1; //Sending enable for loop-back test
if(rxd_index==(buff_len-1)) rxd_index=0;
else rxd_index++;
}
rx_status = 0;
break;
}
default: {
rx_status++;
break;
}
}
switch(tx_status)
{
case 0:{
TDH;
break;
}
case 2:{//start bit
TDL;
tx_status ++;
break;
}
case 4:{//bit 1
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 6:{//bit 2
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 8:{//bit 3
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 10:{//bit 4
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 12:{//bit 5
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 14:{//bit 6
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 16:{//bit 7
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 18:{//bit 8
if((bytebit_s&0x01)==0) TDL;
else TDH;
bytebit_s >>= 1;
tx_status ++;
break;
}
case 20:{//stop bit
TDH;
tx_status ++;
break;
}
case 22:{//stop
tx_status = 0;
break;
}
default: {
tx_status++;
break;
}
}
}
TIM4_ClearITPendingBit(TIM4_IT_UPDATE);
}
#endif /*STM8S903*/
/**
* @brief Eeprom EEC Interrupt routine.
* @param None
* @retval None
*/
INTERRUPT_HANDLER(EEPROM_EEC_IRQHandler, 24)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
main.c代码:
/**
******************************************************************************
* @file Project/main.c
* @author MCD Application Team
* @version V2.1.0
* @date 18-November-2011
* @brief Main program body
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s.h"
#include "stm8s_clk.h"
/* Private defines -----------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/* Private defines -----------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
void Init_GPIO(void)
{
GPIO_Init(GPIOB, GPIO_PIN_5, GPIO_MODE_OUT_PP_LOW_FAST);//LED
GPIO_Init(GPIOC, GPIO_PIN_6, GPIO_MODE_IN_PU_NO_IT); //UART_RX
GPIO_Init(GPIOC, GPIO_PIN_7, GPIO_MODE_OUT_PP_HIGH_FAST);//UART_TX
GPIO_WriteHigh(GPIOC, GPIO_PIN_7);
}
void Init_Timer4(void) //1ms period counter
{
TIM4_TimeBaseInit(TIM4_PRESCALER_128, 125);
/* Clear TIM4 update flag */
TIM4_ClearFlag(TIM4_FLAG_UPDATE);
/* Enable update interrupt */
TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE);
TIM4_Cmd(ENABLE);
}
void Init_Timer4_plus(void) //for UART with BDS 9600
{
TIM4_TimeBaseInit(TIM4_PRESCALER_16, 51);
/* Clear TIM4 update flag */
TIM4_ClearFlag(TIM4_FLAG_UPDATE);
/* Enable update interrupt */
TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE);
TIM4_Cmd(ENABLE);
}
/*Start of Pegasus Segment*/
extern __IO uint32_t uwTick;
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = uwTick+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = uwTick;
PY_Delay_us_t(1000000) ;
secondms = uwTick;
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
uint8_t bytebit=1;
uint8_t bytebit_s=1;
uint8_t tx_status = 0;
uint8_t rx_status = 0;
__IO uint8_t Int_Type = 0;
uint8_t td=0;
/*Enf of Pegasus Segment*/
void main(void)
{
/* Config internal high speed clock as 16MHz main clock */
//CLK_HSICmd(ENABLE);
CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV1);
CLK_HSICmd(ENABLE);
CLK_ClockSwitchConfig(CLK_SWITCHMODE_AUTO, CLK_SOURCE_HSI, DISABLE, CLK_CURRENTCLOCKSTATE_DISABLE);
CLK_ClockSwitchCmd(ENABLE);
Init_GPIO();
Init_Timer4();
Int_Type = 0; //1 ms counter mode
enableInterrupts();
for(uint32_t j=0; j<0xffff; j++) ; //for clock stability
PY_usDelayTest();
PY_usDelayOptimize();
disableInterrupts() ;
TIM4_Cmd(DISABLE);
Int_Type = 1; //uart detection mode
Init_Timer4_plus();
enableInterrupts();
while (1)
{
PY_Delay_us_t(1000000);
GPIO_WriteReverse(GPIOB, GPIO_PIN_5);
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval : None
*/
void assert_failed(u8* file, u32 line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
代码下载后测试效果:
总结
实现最简化资源占用代码设计时,如果没有时序要求高的情况,可以用微秒延时函数模拟所有常规接口协议。如果有时序要求高的情况,可以用TIM配合实现所有常规接口协议,只用到TIM这一种官方库代码。如果MCU资源足够,用官方库代码可以减少一些模拟协议代码编程量,所以本篇内容的介绍,多用在资源少的场景。
例程下载
(IAR开发环境工程)STM8S103F3P6 UART TX ONLY模拟协议例程下载
(IAR开发环境工程)STM8S103F3P6 UART TX/RX 模拟协议及环回测试例程下载
–End–