附件下载
联系工作人员获取附件
前言
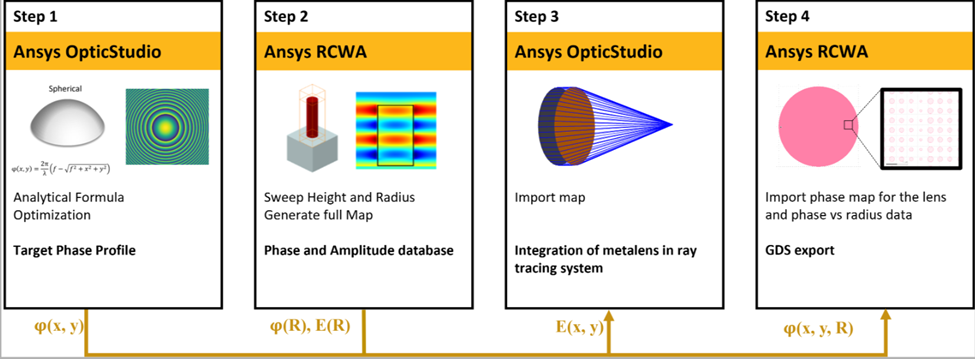
本文介绍了设计和模拟厘米尺度超透镜的工作流程。
我们将一系列不同直径的纳米尺寸等级单元(以下称为纳米单元)在Lumerical中建模,使用RCWA方法对每种直径的纳米单元进行分析,建立纳米元素直径以及其诱发的相位和振幅关系数据库。数据接下来被导入OpticStudio,以整合到光线追踪系统中,借由超透镜把准直光束聚焦。
综述
超透镜是由纳米单元组成的先进光学结构,透过区域性调整单个单元,可以建立复杂的光学功能。然而,大规模仿真这种结构是一个真正的挑战,因为它不是周期性的,它由大量的纳米单元组成。此外,超透镜本质上是基于波动光学的,但需要将它们整合到光线追踪系统中。
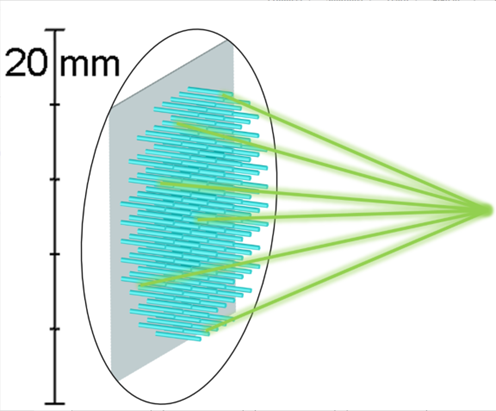
此工作流使用lumerical搭配OpticStudio的物理光学传播(POP)工具可以评估的十分全面,然而从工作流的方法中也呈现出仿真所需的内存随着镜头尺寸变大而变大,大到超出目前内存能力的程度,会限制仿真的超表面尺寸。在本文中,介绍了设计直径为20毫米的大型超透镜的工作流程。在这个工作流程中,演示了我们可以在纳米单元级别设计超表面,并将其组装到厘米等级,并将超透镜整合到OpticStudio的光线追踪系统中。流程最后还提供了将超表面信息提取到GDS档案中进行制造的步骤。
步骤1:定义相位目标
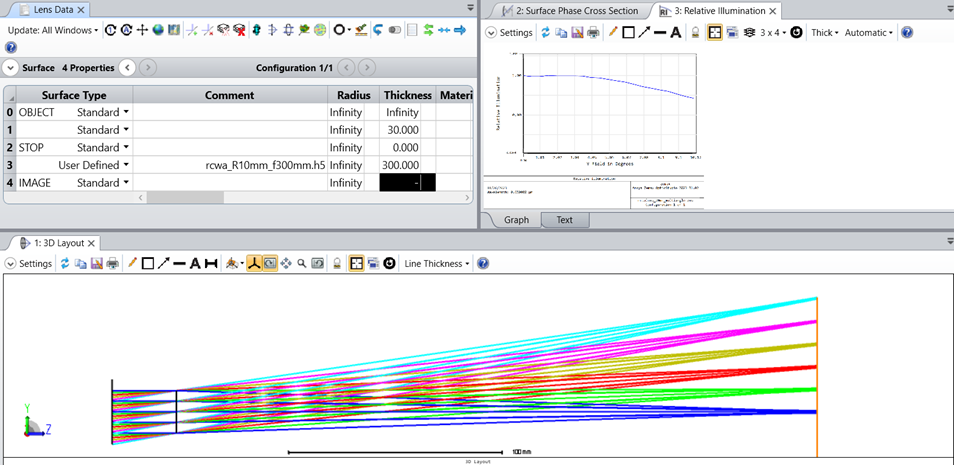
第一步是定义超透镜相位目标的空间分布。由于大尺寸的超透镜需要数量庞大的纳米单元来构成,如果空间分布用位置的查表来表达,内存需求会超出一般CPU的负荷。在这个工作流程中,我们使用一个可解析定义的目标相位轮廓,例如球形或圆柱形轮廓。Ansys OpticStudio还可用于优化整个光学系统中超透镜所需的波前,以便使用具有离散系数的函式(例如多项式)来定义目标相位。在本文中,我们针对的是半径为10mm,焦距为300mm的球面透镜。
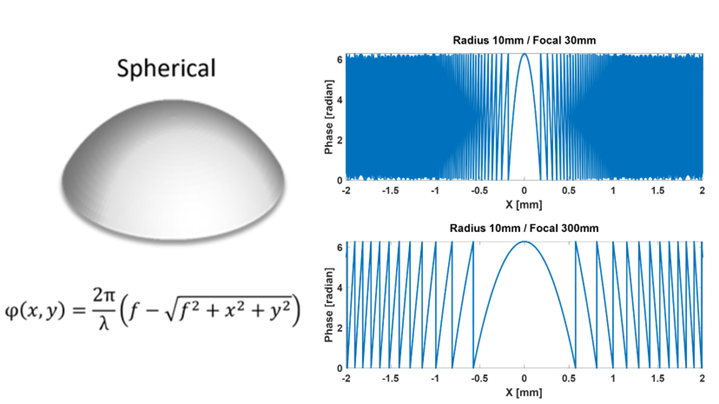
请注意,将数值孔径 (NA) 保持在合理的值非常重要。如果超透镜被设计为相位变化很快的轮廓,则边缘上的相位变化可能超出考虑纳米单元的分辨率所能实现的范围。通常微纳单元数据库所涵盖的相位范围是2π,因此数值孔径应满足奈奎斯特采样标准
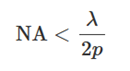
其中p是微纳单元尺寸, λ是设计波长,NA=透镜半径/焦距。超出这个限制,当包裹相位的梯度太陡并且经历快速跳跃时,超透镜模型就会受到限制。有关更多详细信息,请参阅本文步骤 3 中的讨论。
步骤2:微纳单元仿真–高度和半径扫描(未涵盖)
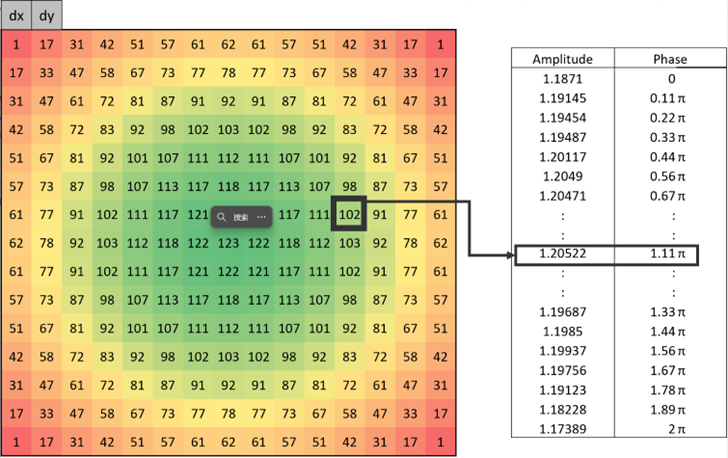
此步骤包括对微纳单元参数(例如纳米棒的半径)进行扫描,以确定微纳单元的局部特性与其输出相位和振幅之间的关系,生成纳米单元响应的数据库。该过程不受超透镜整体尺寸规模影响。该扫描的输出文件包含相位和幅度的数据库信息,为 EH_and_phase_vs_radius_interp_rcwa.mat。
请注意,扫描是针对离散数量的相位执行的,这意味着纳米单元的可能半径的离散数量。这给最终轮廓带来了一定程度的离散化,应该也与纳米单元的制造限制有关。
步骤3:纳米单元分布地图的生成,并在 OpticStudio 中集成
首先基于步骤1的目标相位轮廓和步骤2中定义的数据库,在Lumerical中定义了一个厘米等级的超透镜。数据库被写入一个.h5文件,包括带有索引的映射,指向每个微纳单元的相位和振幅的可能值的离散列表。振幅和相位值的数据库与超透镜整体尺寸无关,但索引图随着镜头的尺寸而增加。由于文件大小随着设计中纳米组件数量的增加而增加,因此建议使用较小的直径进行初步测试。请注意,目前尚未使用振幅信息。此.h5文件在下载包中包含的 Zemax 插件中使用,将大镜头集成到光线追踪系统中。
接下来在OpticStudio的操作中。首先要将3个需要的.dll档案放到指定的安装目录。接下来在OpticStudio中打开案例的档案。超表面被设定在“user defined surface”对象上,搭配lumerical-metalens-XXXX.dll(其中XXXX与版本相关)。通过在注释列中插入生成的 .h5 文件的名称(包括扩展名)来读取数据。加载数据可能需要几分钟的时间。
光线追踪的集成逻辑是在光线撞击超透镜的空间位置处附近的相位值进行插值,以确定局部相位梯度。m阶光线的输出方向计算如下:
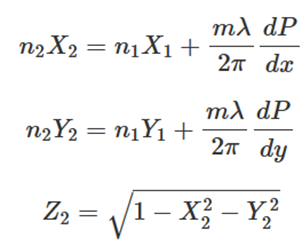
其中(Xi,Yi,Zi)分别是入射与出射光线的单位矢量,n1与n2是入射与出射的环境折射率,λ是波长,m是衍射级次,P(x,y)是局部相位(以弧度为单位), 注意z假设为表面的法向矢量。
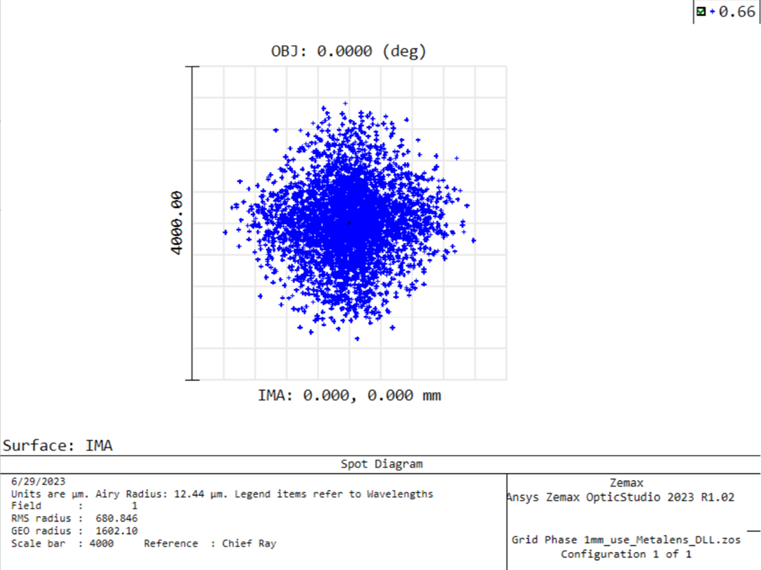
点列图显示聚焦效果并不好,即便使用了理想透镜相位来设计超透镜。造成此结果其中一个原因是微纳单元的纳米柱半径值是有限的采样,其引起的相位变化量是离散的,造成超透镜组成的相位与理想透镜相位有偏差。另一个原因是微纳单元目前是整齐的二维网格排列,在点列图上造成水平与垂直方向的十字图案。
OpticStudio 的表面参数中提供两种根据相位梯度插值方法来计算光线弯曲,值 1 要求双线性插值,而值 3 对应双三次插值。双三次插值可能更准确一些,而双线性方法预计对相位跳跃更稳健一些。
确保系统的波长与用于生成数据库的波长匹配非常重要,角度范围应与生成数据库时 RCWA 扫描中使用的角度范围相匹配,以确保获得最准确的结果。
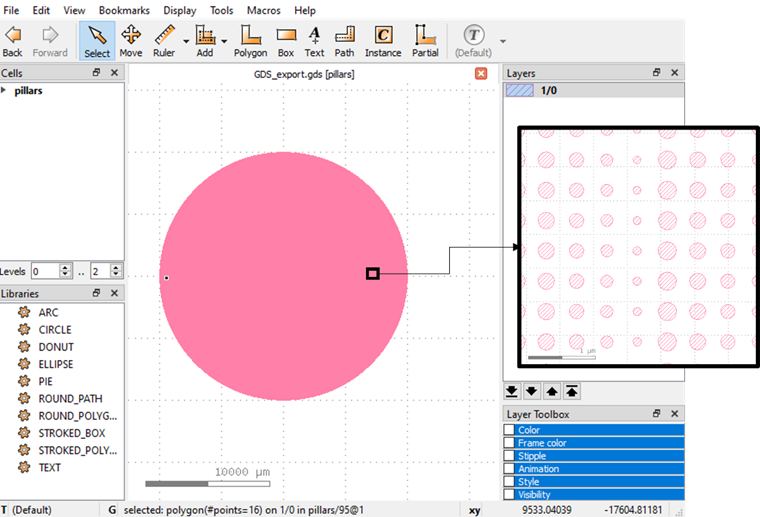
步骤4:GDS档案生成
导出为 GDS 格式是制造过程中必不可少的最后一步。在如此大的规模下仍然支持此功能。