PCL点云处理之自定义生成多种类型的圆柱点云(C++)(二百二十五)
news2026/2/15 20:43:28
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1315651.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
c#可变参数(params)关键字
通过使用 params 关键字,可以指定采用可变数量参数的方法参数。
可以发送参数声明中指定类型的参数的逗号分隔列表,也可以发送指定类型的参数数组。您也可以不发送任何参数。如果未发送任何参数,则参数列表的长度为零。
方法声明中的 param…
Anaconda中使用Jupyter出现’No module named ‘pymysql‘问题解决
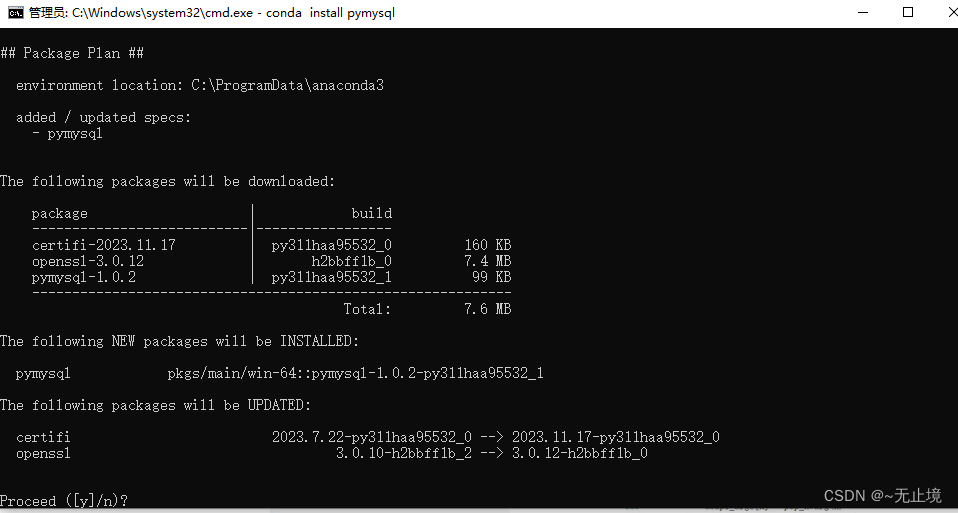
问题截图: 解决办法:
一.找到Anaconda所在文件夹,文件夹处输入 cmd 进入命令控制 二. 在打开的cmd中输入‘conda install pymysql’
三、输入y 安装完成~
测试:
import pandas as pd
from sqlalchemy import create_engine
…

同义词替换降低论文抄袭率的有效性探讨 papergpt
大家好,今天来聊聊同义词替换降低论文抄袭率的有效性探讨,希望能给大家提供一点参考。
以下是针对论文重复率高的情况,提供一些修改建议和技巧,可以借助此类工具: 标题:同义词替换降低论文抄袭率的有效性探…
Redis实现延迟队列
目录 一、什么是延时队列
二、延时队列的应用
三、举例说明
我的设计思想: 一、什么是延时队列 延时队列相比于普通队列最大的区别就体现在其延时的属性上,普通队列的元素是先进先出,按入队顺序进行处理,而延时队列中的元素在入队时会指定…
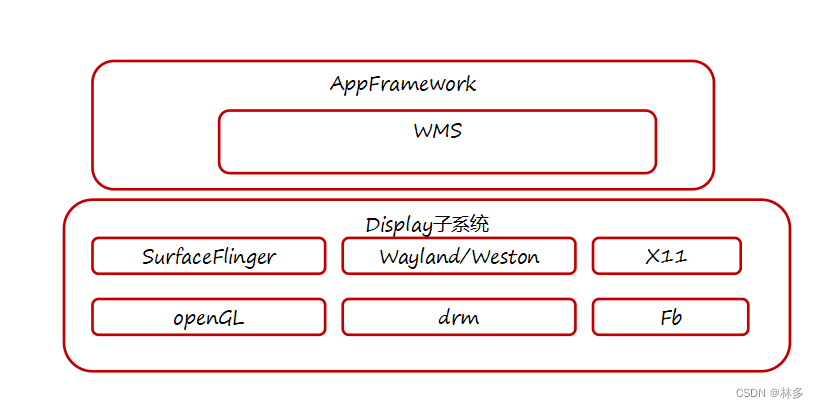
【Android12】WindowManagerService架构分析
Android WindowManagerService架构分析
WindowManagerService(以下简称WMS) 是Android的核心服务。WMS管理所有应用程序窗口(Window)的Create、Display、Update、Destory。 因为Android系统中只有一个WMS(运行在SystemServer进程),可以称其为…

拼多多ID取商品详情API:电商行业的秘密武器与实时数据获取的智慧之路
一、引言
电商行业是一个不断发展和创新的领域,各种电商平台不断涌现,为消费者提供了更加便捷和多样化的购物体验。拼多多作为中国电商市场的一匹黑马,以其独特的社交电商模式和丰富的商品资源,吸引了大量用户。为了满足用户对商…

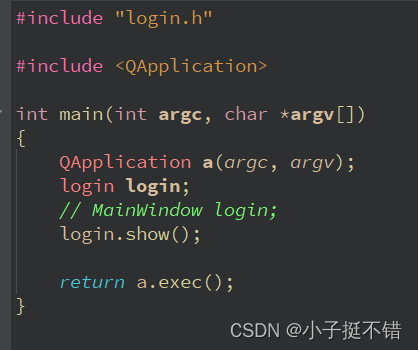
【QT】非常简单的登录界面实现
本系列是作者自学实践过程的记录 本文是关于登录界面设计 有问题欢迎讨论 效果图:
一、创建项目和主界面
创建Qt Widget Application 这里我们使用qmake而不是cmake 这是主界面,登录界面等后面再创建,这里要勾选上generate form࿰…
AI智能化办公:ChatGPT使用方法与技巧
文章目录 ChatGPT简介✨ChatGPT的使用方法✨登录与访问发送请求调整参数 ChatGPT技巧分享✨清晰的提问实验不同的温度值多轮对话 图书推荐✨AI智能化办公内容简介获取方式 AI短视频内容简介获取方式 随着人工智能技术的不断发展,AI助手在办公场景中扮演着越来越重要…

windows10 php8连接sql server
一、环境安装 文章目录 一、环境安装1.安装php拓展2.在 Windows 上安装PHP驱动程序3.在 Windows 上安装ODBC驱动 二、php连接sqlserver三、注意事项数据库相关设置相关语法sqlsrv_fetch_array 的示例:sqlsrv_fetch 的示例:echo 和 print_r 的不同 所用资…
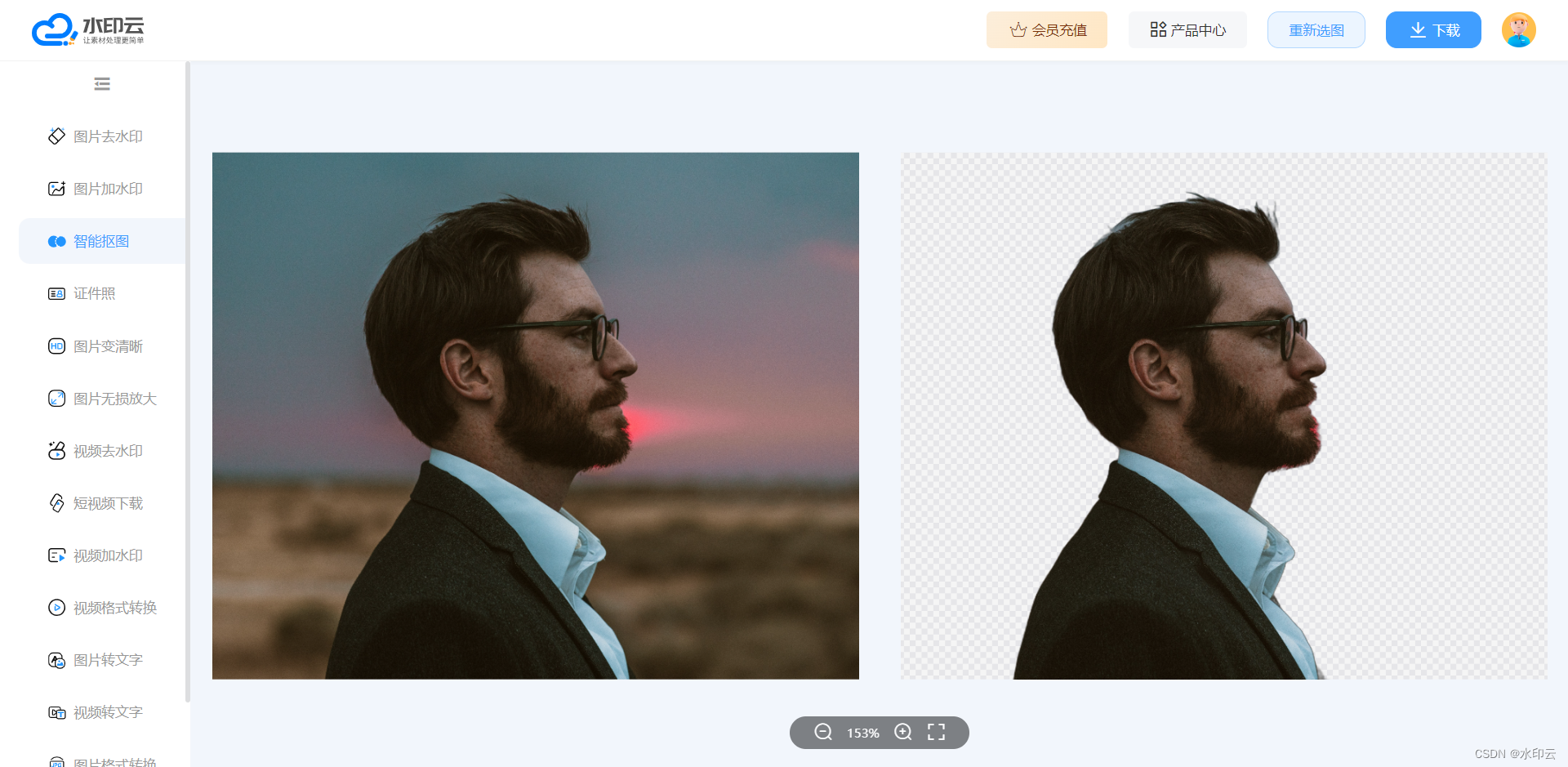
抠图软件哪个好用?什么软件可以抠图换背景?
抠图软件哪个好用?在图片处理中,抠图换背景是一项常见的操作。很多新手可能会对此感到困惑,不知道应该使用什么软件来进行抠图换景。实际上,现在市面上有很多图片处理软件都具备抠图换背景的功能,每款软件都有其优缺点…
王世军:铁笔翰墨染丹青 九峰冠华传千古
鸡是十二生肖中一员,在民间过年时常被剪成窗花,贴于窗户大门上。为表达人们对鸡的喜爱,将正月初一定为“鸡日”,鸡谐音“吉”,意为大吉大利,讨个好彩头。鸡又为“五德之君”,鸡的五德谓之文、武…
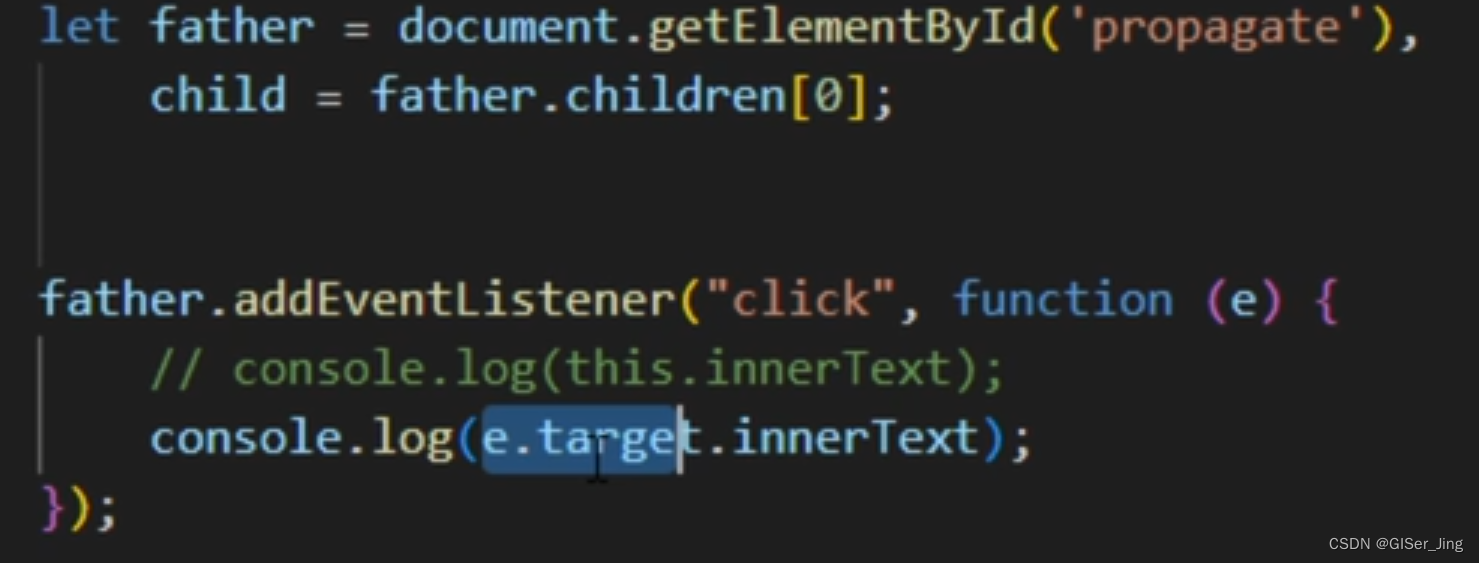
前端基础——鼠标事件对象属性和方法
button:0(未按下)1(左键)2(右键)4(中键)
clientX/clientY(表示事件在客户端区域的水平和垂直坐标,左上为原点)
ctrlKey表示鼠标事件发生时是否按下了ctrl键
MouseEvent.offsetX和MouseEvent.offsetY表示鼠标相对于目标节点内部填充区域的偏移量
MouseEvent.screenX和MouseE…
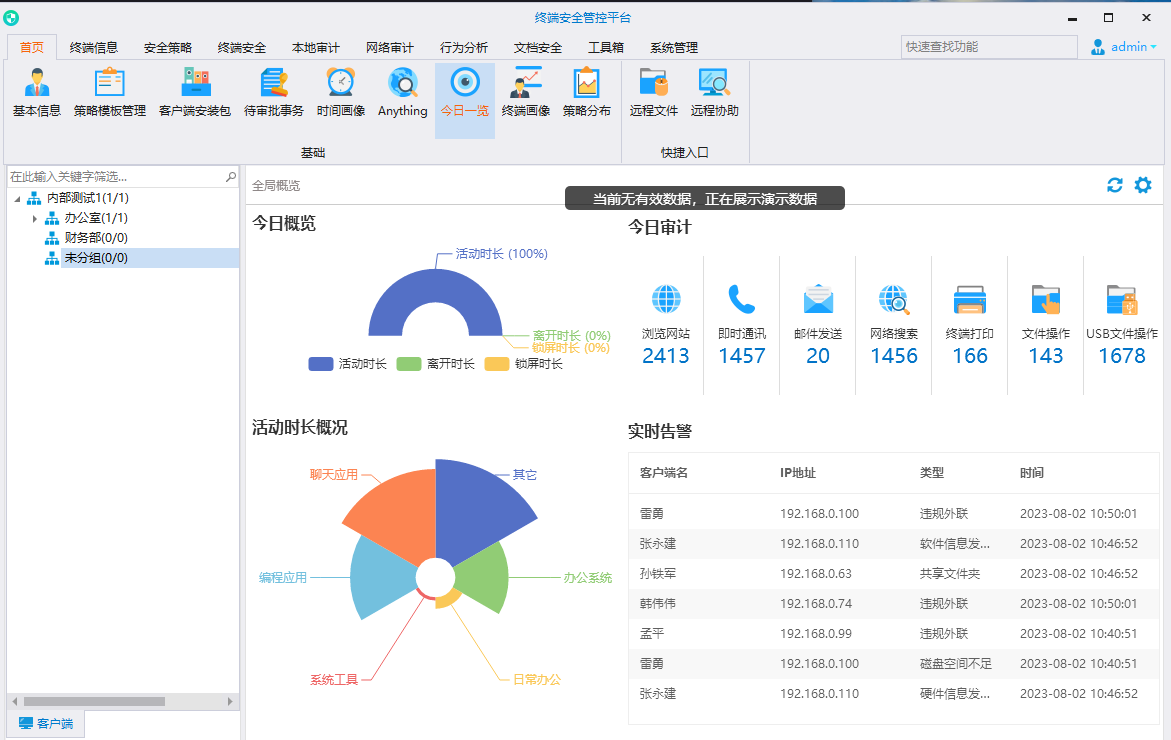
终端安全管理软件安装详细攻略来了
随着信息技术的不断发展,终端安全管理软件在企业和组织中发挥着越来越重要的作用。为了确保终端设备的安全和稳定运行,安装终端安全管理软件是必不可少的。以下是一份终端安全管理软件的安装详细攻略,供大家参考。 一、选择合适的软件
首先&…

空洞文件读取空洞部分的返回值
在空洞文件中,未显式写入的部分被称为"空洞"。当读取空洞部分时,系统会返回字节值为0的数据。
这意味着,当你在空洞文件中读取一个偏移量处的数据,而该偏移量位于空洞部分时,读取操作将返回一个全是0的字节…
2023/12/12作业
思维导图 作业:
成果图 代码
#include "widget.h"
#include "ui_widget.h" Widget::Widget(QWidget *parent) : QWidget(parent) , ui(new Ui::Widget)
{ speechernew QTextToSpeech(this); ui->setupUi(this); //一直获取当前时间 idst…

带你学C语言~指针(1)
Hello,CSDN的各位家人们,你们好啊!今天,小赵要给大家分享的C语言知识是指针,相信不少家人们都或多或少被指针搞得晕头转向,小赵一开始也是,但后来小赵经过不断地努力学习,终于将这里面的知识弄懂…
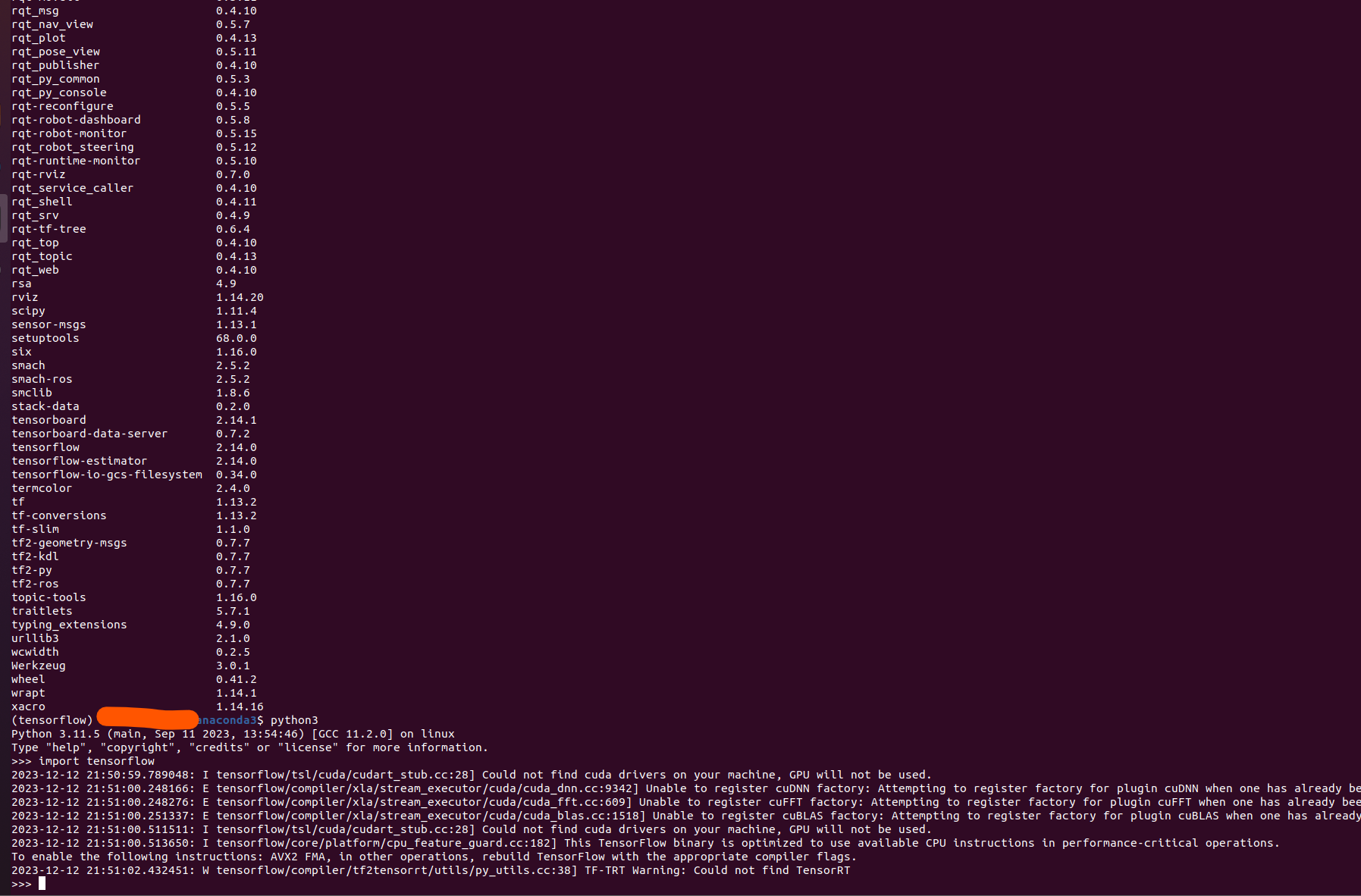
【Anaconda】Ubuntu anaconda使用(新建环境、最小化安装Tensorflow, CUDA对应关系)
Ubuntu anaconda使用(新建环境、最小化安装Tensorflow) 文章目录 Ubuntu anaconda使用(新建环境、最小化安装Tensorflow)使用conda打包虚拟环境查看已创建的环境删除虚拟环境命令下运行.ipynb文件 清华源地址:
https:…

Postman中参数填写方式
Postman中参数填写和请求方法有关,一般接口用例请求方法GET与POST常用,所以主要是这两种请求方法请求参数填写
一、GET请求方法参数填写
1、直接在URL中填写请求参数,如直接在URL中填写:
http://www.example.com:8089/userapi?unamelisi&…
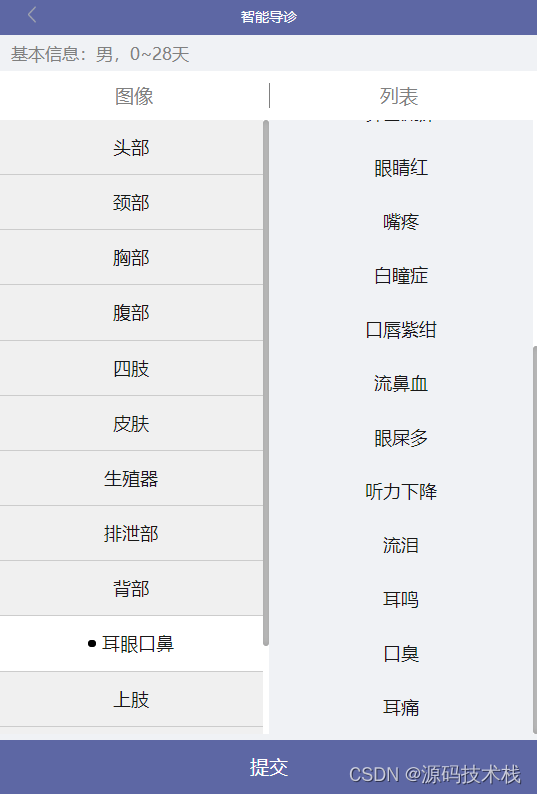
Java医院3D人体智能导诊系统源码 Uniapp+springboot 微信小程序
“智能导诊”以人工智能手段为依托,为人们提供智能分诊、问病信息等服务,在一定程度上满足了人们自我健康管理、精准挂号等需求。智能导诊可根据描述的部位和病症,给出适合病症的科室参考。 智能导诊页面会显示男性或女性的身体结构图&#x…