1.概念
I2C总线是PHLIPS公司在八十年代初推出的一种串行的半双工同步总线,主要用于连接整体电路
2.IIC总线硬件连接
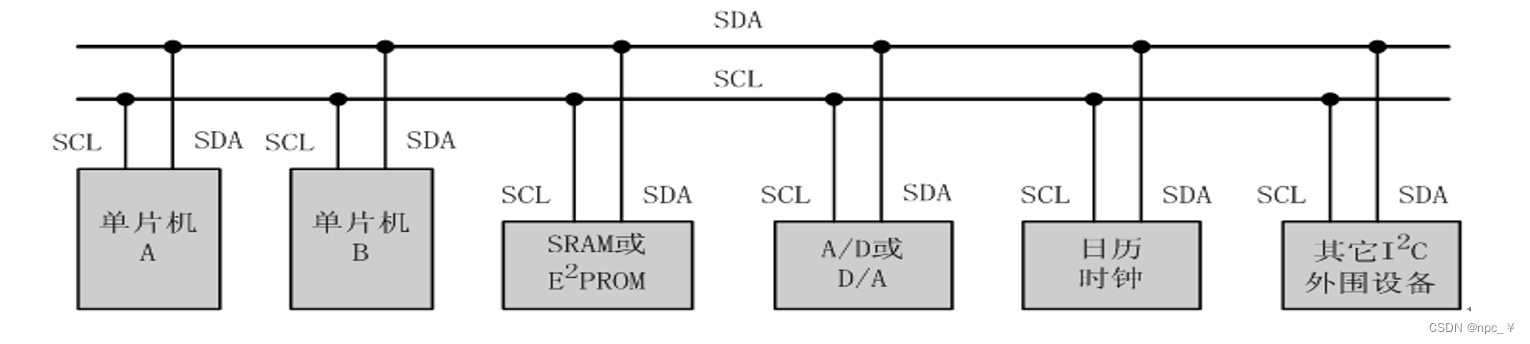
1.IIC总线支持多主机多从机,但是在实际开发过程中,大多数采用单主机多从机模式
2.挂接到IIC总线上,每个从机设备都有自己的7bit从机地址
3.在总线上,发送数据的叫做发送器,接收数据叫做接收器
4.主动发起数据的叫做主机,只能被动接收数据的叫做从机
5.时钟信号由主机产生,作用:给从机,为了IIC总线上传输数据同步
3.IIC总线时序
3.1起始信号

在SCL为高电平期间,SDA从高到低的变化(下降沿),属于起始信号
起始信号由主机产生,起始信号产生之后,总线占用状态
3.2停止信号
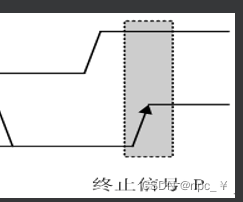
在SCL为高电平期间,SDA从低到高的变化(上升沿),属于终止信号
停止信号由主机产生,停止信号产生之后,总线空闲状态
3.3数据传输信号(读写)
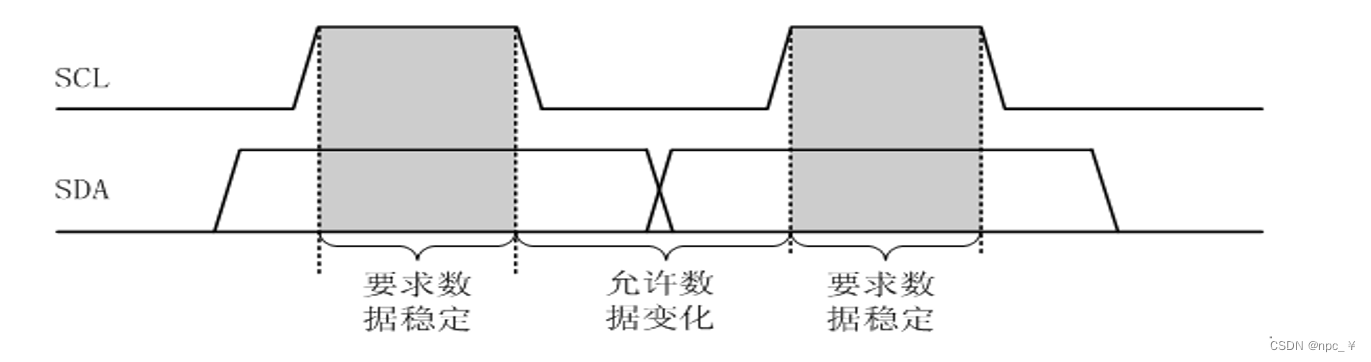
1.在SCL为高电平期间,数据线上的数据保持稳定,接收器从数据线上读取数据
2.在SCL为低电平期间,数据线上的数据允许变化,发送器向数据线上写入数据
3.4应答信号
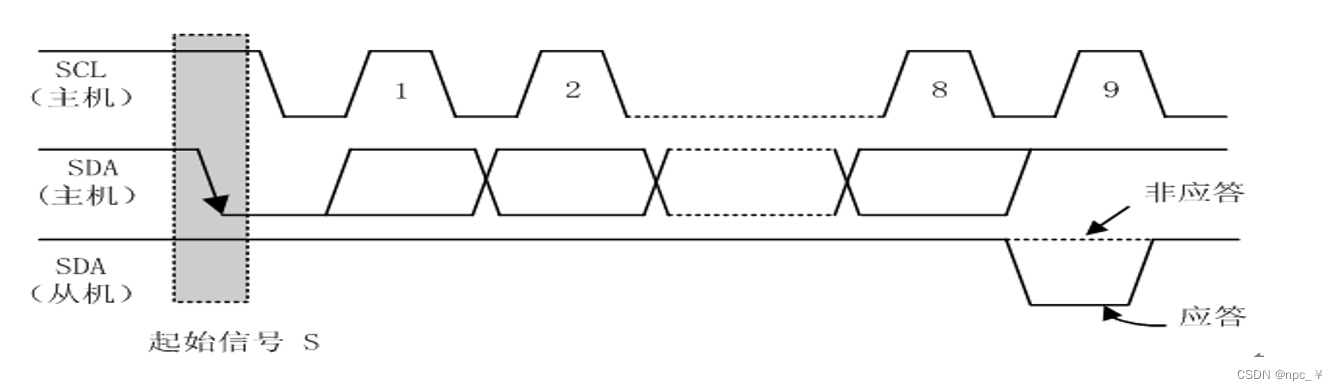
1.每一个字节必须保证是8位长度。数据传送时,先传送高位,在发送低位,每一个被传送的字节后面都必须跟随一位应答位(即一帧共有9位)
2.发送器在发送完8位数据位之后,接收器在第9个时钟周期,返回一个应答信号(0),或者非应答信号(1)
在第9个时钟周期,接收器向数据线上写入数据
在第9个时钟周期,发送器从数据线上读取数据
如果读取到0,代表应答信号
如果读取到1,代表非应答信号
3.5寻址

1.IIC总线上传输数据是广义的,可以传输地址信号,也可以传输数据信号
2.主机在产生起始信号之后,必须传送7位从机地址,加上读写位
3.用0表示写,用1表示读
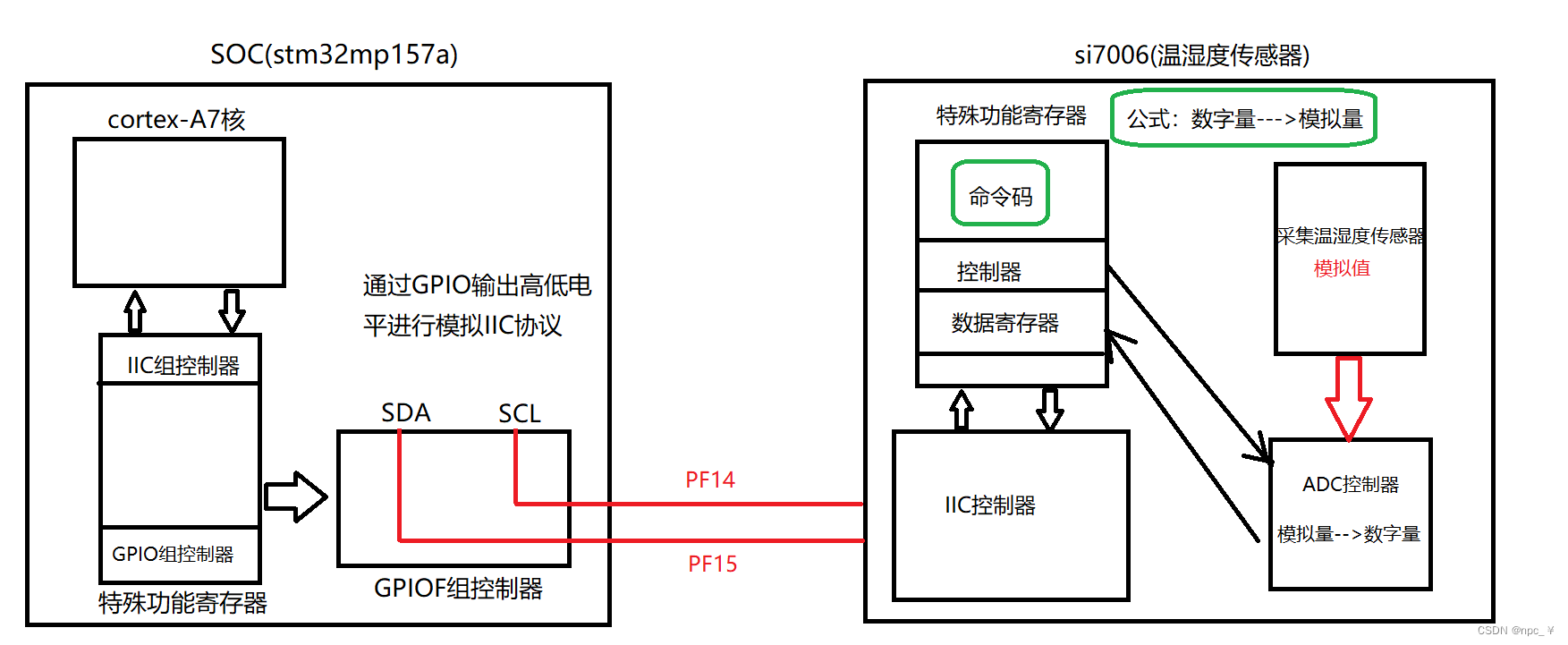
4.IIC框图

5.IIC总线协议
5.1主机给从机发送一个字节

5.2主机给从机发送多个连续字节

5.3主机从从机读一个字节

5.4主机从从机读多个连续字节

6.GPIO模拟IIC协议
7.分析SI7006芯片手册
7.1思路
1.分析SI7006芯片手册内部实现框图
2.分析SI7006从机地址
3.分析SI7006芯片通信协议
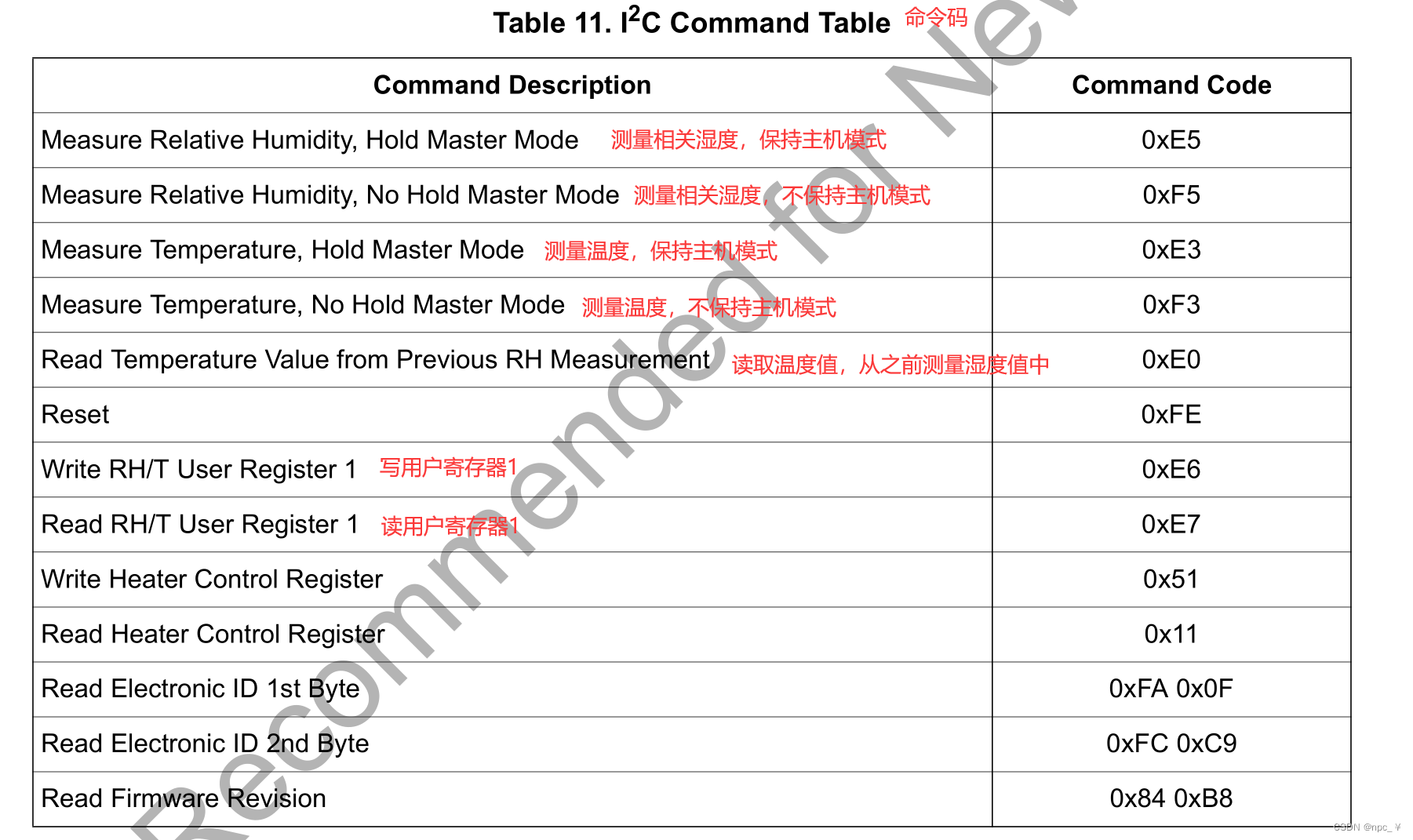
4.分析找到采集温湿度传感器命令码
5.找到将采集的模拟量转换为数字量的公式
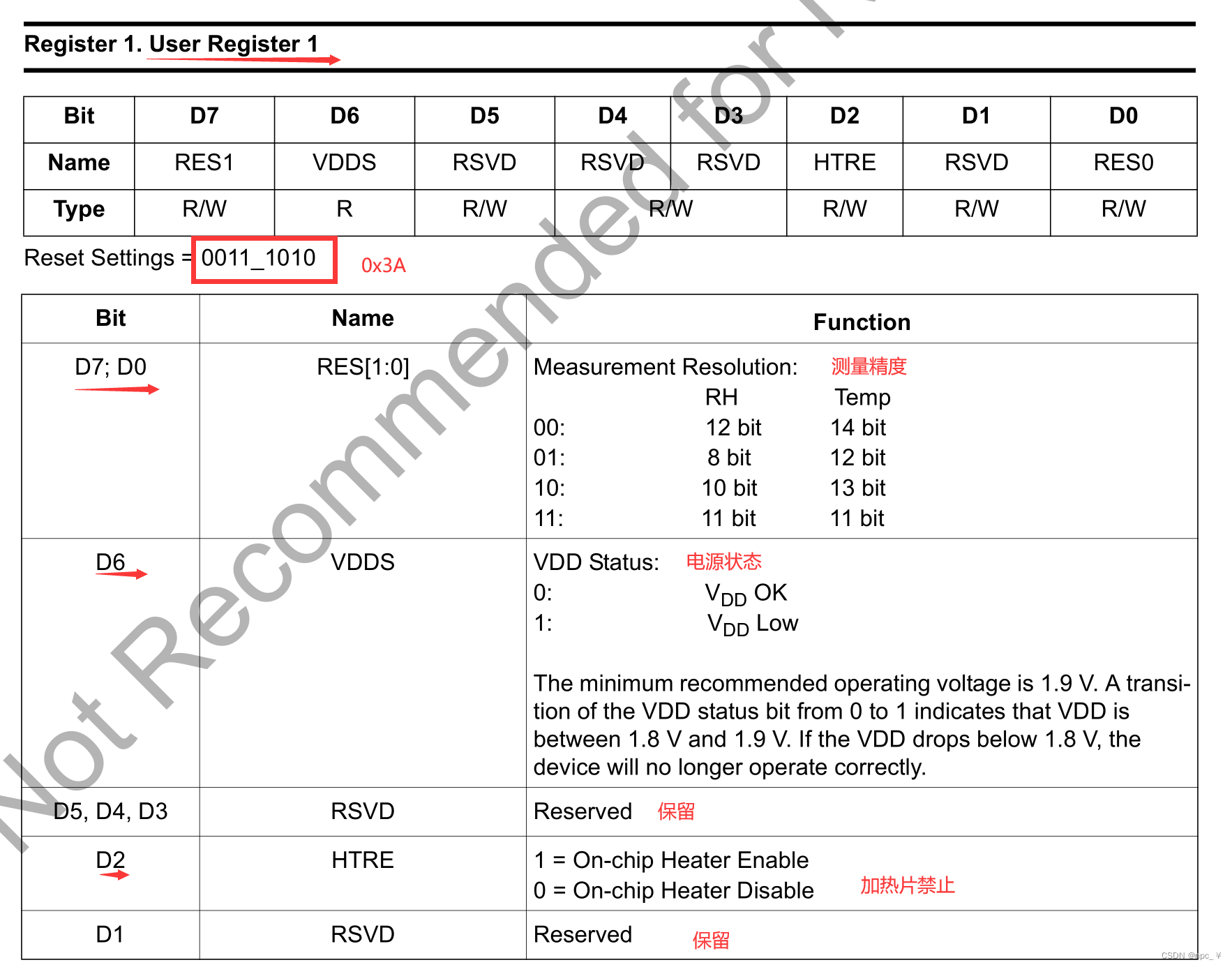
6.分析SI7006初始化的值
7.2从机地址
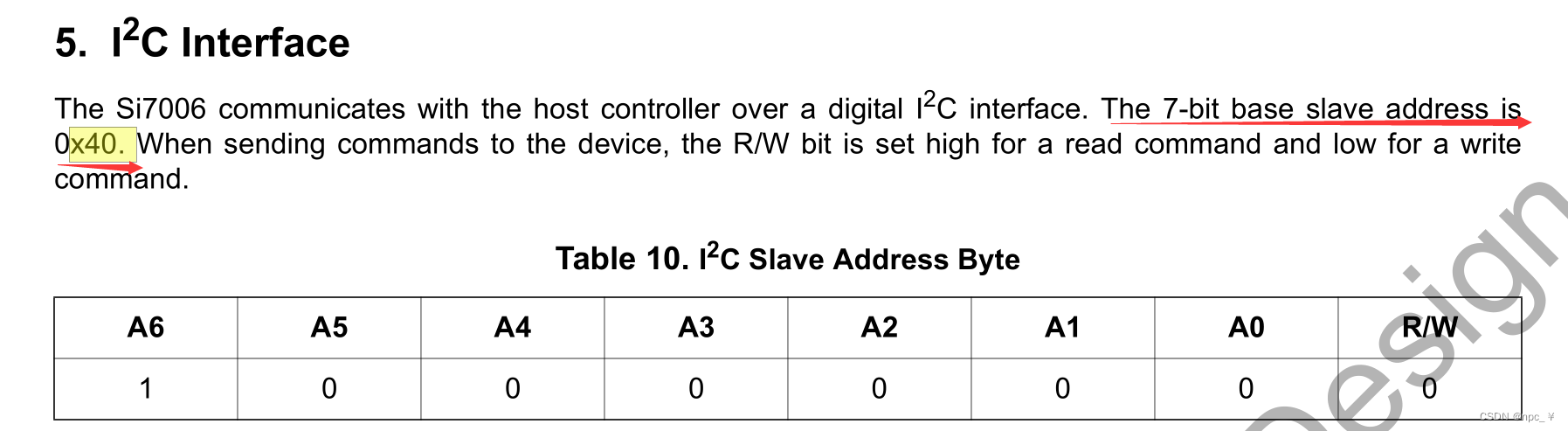
通过以上分析可知,si7006芯片从机地址0x40
从机地址 + 读:0x40 << 1 | 1
从机地址 + 写:0x40 << 1 | 0
7.3分析命令码
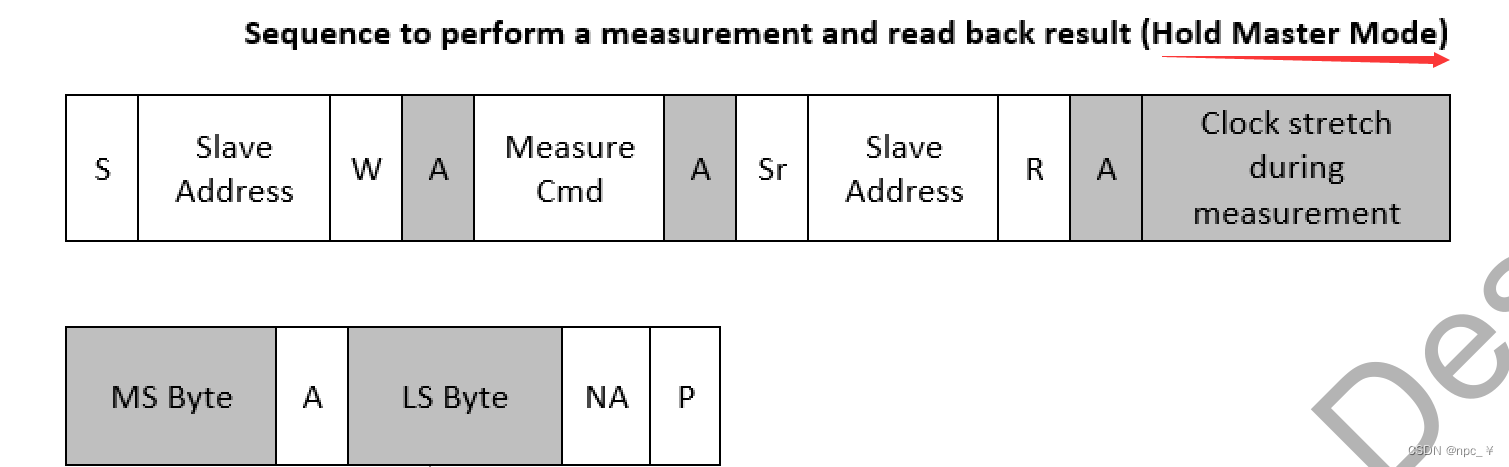
7.4协议
7.5公式


7.6初始化值
8.代码
// si7006.h
#ifndef __SI7006_H__
#define __SI7006_H__
#include "iic.h"
#define SI7006_SLAVE 0x40
void si7006_init(void);
unsigned short si7006_read_hum_data(unsigned char slave_addr, unsigned char cmd_code);
short si7006_read_temp_data(unsigned char slave_addr, unsigned char cmd_code);
#endif //__SI7006_H__
// si7006.c
#include "iic.h"
#include "si7006.h"
/*
* 函数名:si7006_init
* 函数功能:SI7006芯片的初始化
* 函数参数:无
* 函数返回值:无
*/
extern void delay(int ms);
// 往SI7006芯片0XE6写入0X3A
void si7006_init(void)
{
// I2初始化
i2c_init();
// 发送起始信号
i2c_start();
// 主机发送7位从机地址+1位写位
i2c_write_byte(0X40 << 1 | 0);
// 等待从机回应
i2c_wait_ack();
// 发送寄存器地址
i2c_write_byte(0XE6);
// 等待从机回应
i2c_wait_ack();
// 发送要写的数据
i2c_write_byte(0X3A);
// 等待从机回应
i2c_wait_ack();
// 发送终止信号
i2c_stop();
}
/*
* 函数名:si7006_read_hum_data
* 函数功能:读取SI7006的湿度转换结果
* 函数参数:
* slave_addr : 从机地址
* cmd_code : 命令码
* 函数返回值:湿度测量的数字量
*/
unsigned short si7006_read_hum_data(unsigned char slave_addr,
unsigned char cmd_code)
{
unsigned short dat; // 保存读取到的湿度数据
unsigned char dat_h, dat_l; // 保存读取到的数据的高八位和低八位
// 发送起始信号
i2c_start();
// 主机发送7位从机地址+1位写位
i2c_write_byte(slave_addr << 1 | 0);
// 等待从机回应
i2c_wait_ack();
// 发送寄存器地址
i2c_write_byte(cmd_code);
// 等待从机回应
i2c_wait_ack();
// 发送第二次起始信号
i2c_start();
// 主机发送7位从机地址+1位写位
i2c_write_byte(slave_addr << 1 | 1);
// 等待从机回应
i2c_wait_ack();
// 延时等待从机测量数据
delay(100);
// 读取数据的高8位
dat_h = i2c_read_byte(0); // 读取完毕发送应答信号
// 读取数据的低8位
dat_l = i2c_read_byte(1); // 读取完毕发送非应答信号
// 发送停止信号
i2c_stop();
// 将读取到的数据整合到一起
dat = (dat_h << 8) | dat_l;
return dat;
}
/*
* 函数名:si7006_read_temp_data
* 函数功能:读取SI7006的温度转换结果
* 函数参数:
* slave_addr : 从机地址
* cmd_code : 命令码
* 函数返回值:温度测量的数字量
*/
short si7006_read_temp_data(unsigned char slave_addr,
unsigned char cmd_code)
{
short dat; // 保存读取到的温度数据
char dat_h, dat_l; // 保存读取到的数据的高八位和低八位
// 发送起始信号
i2c_start();
// 主机发送7位从机地址+1位写位
i2c_write_byte(slave_addr << 1 | 0);
// 等待从机回应
i2c_wait_ack();
// 发送寄存器地址
i2c_write_byte(cmd_code);
// 等待从机回应
i2c_wait_ack();
// 发送第二次起始信号
i2c_start();
// 主机发送7位从机地址+1位写位
i2c_write_byte(slave_addr << 1 | 1);
// 等待从机回应
i2c_wait_ack();
// 延时等待从机测量数据
delay(100);
// 读取数据的高8位
dat_h = i2c_read_byte(0); // 读取完毕发送应答信号
// 读取数据的低8位
dat_l = i2c_read_byte(1); // 读取完毕发送非应答信号
// 发送停止信号
i2c_stop();
// 将读取到的数据整合到一起
dat = (dat_h << 8) | dat_l;
return dat;
}
// iic.h
#ifndef __IIC_H__
#define __IIC_H__
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_rcc.h"
// #include "gpio.h"
/* 通过程序模拟实现I2C总线的时序和协议
* GPIOF ---> AHB4
* I2C1_SCL ---> PF14
* I2C1_SDA ---> PF15
*
* */
#define SET_SDA_OUT \
do \
{ \
GPIOF->MODER &= (~(0x3 << 30)); \
GPIOF->MODER |= (0x1 << 30); \
} while (0)
#define SET_SDA_IN \
do \
{ \
GPIOF->MODER &= (~(0x3 << 30)); \
} while (0)
#define I2C_SCL_H \
do \
{ \
GPIOF->BSRR |= (0x1 << 14); \
} while (0)
#define I2C_SCL_L \
do \
{ \
GPIOF->BRR |= (0x1 << 14); \
} while (0)
#define I2C_SDA_H \
do \
{ \
GPIOF->BSRR |= (0x1 << 15); \
} while (0)
#define I2C_SDA_L \
do \
{ \
GPIOF->BRR |= (0x1 << 15); \
} while (0)
#define I2C_SDA_READ (GPIOF->IDR & (0x1 << 15))
void delay_us(void);
void i2c_init(void);
void i2c_start(void);
void i2c_stop(void);
void i2c_write_byte(unsigned char dat);
unsigned char i2c_read_byte(unsigned char ack);
unsigned char i2c_wait_ack(void);
void i2c_ack(void);
void i2c_nack(void);
#endif
// icc.h
#include "iic.h"
extern void printf(const char *fmt, ...);
/*
* 函数名 : delay_us
* 函数功能:延时函数
* 函数参数:无
* 函数返回值:无
* */
void delay_us(void)
{
unsigned int i = 2000;
while (i--)
;
}
/*
* 函数名 : i2c_init
* 函数功能: i2C总线引脚的初始化, 通用输出,推挽输出,输出速度,
* 函数参数:无
* 函数返回值:无
* */
void i2c_init(void)
{
// 使能GPIOF端口的时钟
RCC->MP_AHB4ENSETR |= (0x1 << 5);
// 设置PF14,PF15引脚为通用的输出功能
GPIOF->MODER &= (~(0xF << 28));
GPIOF->MODER |= (0x5 << 28);
// 设置PF14, PF15引脚为推挽输出
GPIOF->OTYPER &= (~(0x3 << 14));
// 设置PF14, PF15引脚为高速输出
GPIOF->OSPEEDR |= (0xF << 28);
// 设置PF14, PF15引脚的禁止上拉和下拉
GPIOF->PUPDR &= (~(0xF << 28));
// 空闲状态SDA和SCL拉高
I2C_SCL_H;
I2C_SDA_H;
}
/*
* 函数名:i2c_start
* 函数功能:模拟i2c开始信号的时序
* 函数参数:无
* 函数返回值:无
* */
void i2c_start(void)
{
/*
* 开始信号:时钟在高电平期间,数据线从高到低的变化
* --------
* SCL \
* --------
* ----
* SDA \
* --------
* */
// 确保SDA是输出状态 PF15输出
SET_SDA_OUT;
// 空闲状态SDA和SCL拉高
I2C_SCL_H;
I2C_SDA_H;
delay_us(); // 延时等待一段时间
I2C_SDA_L; // 数据线拉低
delay_us(); // 延时等待一段时间
I2C_SCL_L; // 时钟线拉低,让总线处于占用状态
}
/*
* 函数名:i2c_stop
* 函数功能:模拟i2c停止信号的时序
* 函数参数:无
* 函数返回值:无
* */
void i2c_stop(void)
{
/*
* 停止信号 : 时钟在高电平期间,数据线从低到高的变化
* ----------
* SCL /
* --------
* --- -------
* SDA X /
* --- -------
* */
// 确保SDA是输出状态 PF15输出
SET_SDA_OUT;
// 时钟线拉低
I2C_SCL_L;
delay_us(); // 延时等待一段时间
I2C_SDA_L; // 数据线拉低
delay_us(); // 延时等待一段时间
// 时钟线拉高
I2C_SCL_H;
delay_us(); // 延时等待一段时间
I2C_SDA_H; // 数据线拉高
}
/*
* 函数名: i2c_write_byte
* 函数功能:主机向i2c总线上的从设备写8bits数据
* 函数参数:dat : 等待发送的字节数据
* 函数返回值: 无
* */
void i2c_write_byte(unsigned char dat)
{
/*
* 数据信号:时钟在低电平期间,发送器向数据线上写入数据
* 时钟在高电平期间,接收器从数据线上读取数据
* ---- --------
* SCL \ / \
* -------- --------
* -------- ------------------ ---
* SDA X X
* -------- ------------------ ---
*
* 先发送高位在发送低位
* */
// 确保SDA是输出状态 PF15输出
SET_SDA_OUT;
unsigned int i;
for (i = 0; i < 8; i++)
{
// 时钟线拉低
I2C_SCL_L;
delay_us(); // 延时
// 0X3A->0011 1010 0X80->10000000
if (dat & 0X80) // 最高位为1
{
// 发送1
I2C_SDA_H;
}
else // 最高位为0
{
I2C_SDA_L; // 发送0
}
delay_us(); // 延时
// 时钟线拉高,接收器接收
I2C_SCL_H;
delay_us(); // 延时,用于等待接收器接收数据
delay_us(); // 延时
// 将数据左移一位,让原来第6位变为第7位
dat = dat << 1;
}
}
/*
* 函数名:i2c_read_byte
* 函数功能: 主机从i2c总线上的从设备读8bits数据,
* 主机发送一个应答或者非应答信号
* 函数参数: 0 : 应答信号 1 : 非应答信号
* 函数返回值:读到的有效数据
*
* */
unsigned char i2c_read_byte(unsigned char ack)
{
/*
* 数据信号:时钟在低电平期间,发送器向数据线上写入数据
* 时钟在高电平期间,接收器从数据线上读取数据
* ---- --------
* SCL \ / \
* -------- --------
* -------- ------------------ ---
* SDA X X
* -------- ------------------ ---
*
* 先接收高位, 在接收低位
* */
unsigned int i;
unsigned char dat; // 保存接受的数据
// 将数据线设置为输入
SET_SDA_IN;
for (i = 0; i < 8; i++)
{
// 先把时钟线拉低,等一段时间,保证发送器发送完毕数据
I2C_SCL_L;
delay_us();
delay_us(); // 保证发送器发送完数据
// 时钟线拉高,读取数据
I2C_SCL_H;
delay_us();
dat = dat << 1; // 数值左移 0000 0000
if (I2C_SDA_READ) // pf15管脚得到了一个高电平输入
{
dat |= 1; // 0000 0110
}
else
{
dat &= (~0X1);
}
delay_us();
}
if (ack)
{
i2c_nack(); // 发送非应答信号,不再接收下一次数据
}
else
{
i2c_ack(); // 发送应答信号
}
return dat;
}
/*
* 函数名: i2c_wait_ack
* 函数功能: 主机作为发送器时,等待接收器返回的应答信号
* 函数参数:无
* 函数返回值:
* 0:接收到的应答信号
* 1:接收到的非应答信号
* */
unsigned char i2c_wait_ack(void)
{
/*
* 主机发送一个字节之后,从机给主机返回一个应答信号
*
* -----------
* SCL / M:读 \
* ------------- --------
* --- ---- --------------------
* SDA X X
* --- --------------------
* 主 释 从机 主机
* 机 放 向数据 读数据线
* 总 线写 上的数据
* 线 数据
* */
// 时钟线拉低,接收器可以发送信号
I2C_SCL_L;
I2C_SDA_H; // 先把数据线拉高,当接收器回应应答信号时,数据线会拉低
delay_us();
SET_SDA_IN; // 设置数据线为输入
delay_us();
delay_us();
I2C_SCL_H; // 用于读取数据线数据
if (I2C_SDA_READ) // PF15得到一个高电平输入,收到非应答信号
return 1;
I2C_SCL_L; // 时钟线拉低,让数据线处于占用状态
return 0;
}
/*
* 函数名: iic_ack
* 函数功能: 主机作为接收器时,给发送器发送应答信号
* 函数参数:无
* 函数返回值:无
* */
void i2c_ack(void)
{
/* --------
* SCL / \
* ------- ------
* ---
* SDA X
* --- -------------
* */
// 保证数据线是输出
SET_SDA_OUT;
I2C_SCL_L; // 拉低时钟线
delay_us();
I2C_SDA_L; // 数据线拉低,表示应答信号
delay_us();
I2C_SCL_H; // 时钟线拉高,等待发送器读取应答信号
delay_us();
delay_us();
I2C_SCL_L; // 数据线处于占用状态,发送器发送下一次数据
}
/*
* 函数名: iic_nack
* 函数功能: 主机作为接收器时,给发送器发送非应答信号
* 函数参数:无
* 函数返回值:无
* */
void i2c_nack(void)
{
/* --------
* SCL / \
* ------- ------
* --- ---------------
* SDA X
* ---
* */
// 保证数据线是输出
SET_SDA_OUT;
I2C_SCL_L; // 拉低时钟线
delay_us();
I2C_SDA_H; // 数据线拉高,表示非应答信号
delay_us();
I2C_SCL_H; // 时钟线拉高,等待发送器读取应答信号
delay_us();
delay_us();
I2C_SCL_L; // 数据线处于占用状态,发送器发送下一次数据
}
// main.c
#include "si7006.h"
void delay(int ms)
{
int i, j;
for (i = 0; i < ms; i++)
{
for (j = 0; j < 2000; j++)
;
}
}
int main()
{
unsigned short hum;
short tem;
// 进行si7006的初始化
si7006_init();
while (1)
{
// 读取湿度
hum = si7006_read_hum_data(0X40, 0XE5);
// 读取温度
tem = si7006_read_temp_data(0X40, 0XE3);
// 将温度数据和湿度数据按照转换公式进行转换
hum = 125 * hum / 65536 - 6;
tem = 175.72 * tem / 65536 - 46.85;
delay(1000); // 延时打印
// 将获取到的数据打印到串口
printf("hum:%d\n", hum);
printf("tem:%d\n", tem);
}
return 0;
}
![leetcode--1004 最大连续1的个数 III[滑动窗口c++]](https://img-blog.csdnimg.cn/img_convert/8359a814a22f6912b6659667cc99ac75.png)








![[ 云计算 | Azure 实践 ] 在 Azure 门户中创建 VM 虚拟机并进行验证](https://img-blog.csdnimg.cn/direct/7d57aff1d1214ab9b11cbbbce77d1502.png)