文章目录
- 运动控制要求
- 车辆子系统控制系统配置要求
- 车辆运动控制系统要求
- 驱动系统
- 制动系统
- 驻车系统
- 转向系统
- 换档系统
- 自动启停系统
- 车联网系统
- 车辆运行数据采集系统
- 灯光系统
- 门锁车窗系统
- 续航里程
- 车内HMI系统
- 胎压监测系统
- 无钥匙进入及启动系统
- 雨刮系统
- 空调系统
- 安全系统
- 电动后视镜系统
- 喇叭系统
- 车外交互HMI系统
- 自动充电系统
- 动态响应曲线
- 预期功能安全
- 典型事件
运动控制要求
车辆子系统控制系统配置要求
AVP系统要求以下相关子系统支持线控功能:
1. ECM/HCU/VCU 支持线控功能,可以接收并执行总线上AVP 系统发送的扭矩/加速度请求且反馈车辆目前实际执行的扭矩/加速度;
2. ESP 支持线控功能,可以接收并执行总线上AVP 系统发送的负扭矩/减速度请求且反馈车辆目前实际执行的负扭矩/减速度;
3. EPS 支持线控功能,可以接收并执行总线上AVP 系统发送的角度/角加速度请求且反馈车辆目前实际执行的角度/角加速度;
4. BCM 支持线控功能,可以接收并执行总线上AVP 系统发送的灯光、雨刮、门锁等控制请求且反馈车辆目前实际的灯光、雨刮、门锁等相关功能状态;
5. PEPS 支持线控功能,可以接收并执行总线上AVP 系统发送的启动/熄火请求且反馈车辆目前实际启动/熄火状态;
6. AVP 系统的控制器应接KL.30 电源且与原车T-Box 或独立T-Box 相连,以远程唤醒或熄灭车辆。
车辆运动控制系统要求
车辆运动控制系统应能支持决策模块发送的控制指令,按照决策结果对车辆进行控制。车辆的各个操控系统应能够通过总线与决策系统相连接,并能够按照决策系统发出的总线指令精确地控制加速程度、制动程度、转向幅度、灯光控制等驾驶动作,以实现车辆的自主驾驶。
驱动系统
| AVP 系统对驱动系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 线控驱动系统 | 驱动控制 | 驾驶模式 | 驱动系统模式切换: 人工驾驶 自动驾驶 故障模式等 | ≤300ms | - | - | ≤20ms | 必需 |
| 扭矩控制 | 扭矩控制(N.m) | - | - | |||||
| 车辆速度 | 车辆目标速度(km/h) | -10~15 | 0.1 | |||||
| 目标加速度 | 车辆目标加速度(m/s2) | ≥3 | 0.1 | |||||
| 驱动反馈 | 当前驾驶模式 | 当前驾驶模式: 人工驾驶 自动驾驶 故障模式等 | ≤100ms | - | - | 必需 | ||
| 实际驱动扭矩 | 车辆实际驱动扭矩(N.m) | - | - | |||||
| 实际加速度 | 车辆实际加速度(m/s2) | - | 0.1 | |||||
| 实际车辆速度 | 车辆实际速度(km/h) | - | 0.1 | |||||
| 加速脚踏板位置 | 加速踏板实际位置(%) | 0~100 | 1% | |||||
| 轮速 | 车辆实际轮速(rad/s) | - | - | 推荐 | ||||
| 发动机/电机转速 | 发动机转速或电机转速(rpm) | - | - | 推荐 | ||||
| 故障信息 | 驱动系统的故障信息 | - | - | 必需 | ||||
| 人工接管 | 加速踏板位置信号 | 当接收到驱动加速踏板信号时,可退出自动驾驶模式 | ≤100ms | - | - | ≤20ms | 必需 | |
| 无效处理 | 当接收指令越界等无效信号应拒绝执行,并退出自动驾驶模式 | - | - | - | - | 必需 | ||
制动系统
| AVP 系统对制动系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 线控制动系统(行车制动) | 制动控制 | 驾驶模式 | 驱动系统模式切换: 人工驾驶 自动驾驶 故障模式等 | ≤100ms | - | - | ≤20ms | 必需 |
| 目标减速度 | 车辆目标减速度(m/s2) | -5~0 | 0.1 | |||||
| 制动反馈 | 当前驾驶模式 | 当前驾驶模式: 人工驾驶 自动驾驶 故障模式等 | ≤100ms | - | - | 必需 | ||
| 制动踏板状态 | 当前制动踏板位置状态 | - | - | |||||
| 制动主缸压力 | 当前制动主缸压力(bar) | 0~100 | 1 | |||||
| 实际减速度 | 车辆实际减速度(m/s2) | - | 0.1 | |||||
| 故障信息 | 制动系统的故障信息 | - | - | |||||
| 人工接管 | 加速踏板位置信号 | 当接收到驱动加速踏板信号时,可退出自动驾驶模式 | ≤100ms | - | - | ≤20ms | 必需 | |
| 无效处理 | 当接收指令越界等无效信号应拒绝执行,并退出自动驾驶模式 | - | - | - | - | 必需 | ||
驻车系统
| AVP 系统对驻车系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 线控驻车系统(驻车制动) | 驻车控制 | 驾驶模式 | 驱动系统模式切换: 人工驾驶 自动驾驶 故障模式等 | ≤1s | - | - | ≤20ms | 必需 |
| 驻车请求 | 请求EPB驻车/解锁 | - | - | |||||
| 驻车反馈 | 当前驾驶模式 | 当前驾驶模式: 人工驾驶 自动驾驶 故障模式等 | ≤100ms | - | - | 必需 | ||
| 驻车状态 | 当前EPB驻车状态反馈 | - | - | |||||
| 故障信息 | 驱动系统的故障信息 | - | - | |||||
转向系统
| AVP 系统对转向系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 线控转向系统 | 转向控制 | 驾驶模式 | 驱动系统模式切换: 人工驾驶 自动驾驶 故障模式等 | ≤100ms | - | - | ≤20ms | 必需 |
| 方向盘转角 | 方向盘目标转角(deg) | 视车而定 | 1 | |||||
| 方向盘转速 | 方向盘目标转速(deg/s) | 0~500 | 1 | 可选 | ||||
| 转向反馈 | 当前驾驶模式 | 当前驾驶模式: 人工驾驶 自动驾驶 故障模式等 | ≤100ms | - | - | 必需 | ||
| 方向盘转角 | 方向盘实际转角(deg) | - | 0.1 | |||||
| 方向盘转速 | 方向盘实际转速(deg/s) | - | 1 | |||||
| 方向盘扭矩 | 方向盘实际转矩(Nm) | - | 0.1 | |||||
| 故障信息 | 制动系统的故障信息 | - | - | |||||
| 人工接管 | 方向盘转矩信号 | 当反馈方向盘扭转矩信号超过阈值(例如2Nm~4Nm等)且达到一定时间后,退出自动驾驶模式 | - | - | ||||
| 无效处理 | 当接收指令越界等无效信号应拒绝执行,并退出自动驾驶模式 | - | - | |||||
换档系统
| AVP 系统对换档系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 线控换挡系统 | 档位控制 | 驾驶模式 | 驱动系统模式切换: 人工驾驶 自动驾驶 故障模式等 | ≤1s | - | - | ≤100ms | 必需 |
| 目标档位 | 目标档位:P/R/N/D | - | - | |||||
| 档位反馈 | 当前档位 | 反馈当前档位:P/R/N/D | ≤100ms | - | - | 必需 | ||
| 故障信息 | 档位/变速箱故障信息 | - | - | |||||
自动启停系统
| AVP 系统对自动启停系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 自动启停系统 | 启停控制 | 上/下电控制 | 上/下电控制 | ≤1s | - | - | ≤100ms | 必需 |
| 点火/熄火控制 | 燃油车点火和熄火控制 | - | - | |||||
| 启停反馈 | 上/下电状态反馈 | 上/下电状态反馈 | ≤100ms | - | - | 必需 | ||
| 点火/熄火状态反馈 | 燃油车点火和熄火状态反馈 | - | - | |||||
| 故障信息 | 自动启停系统的故障信息 | - | - | |||||
车联网系统
| AVP 系统对车联网系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 车联网系统 | 车联网通信 | T-box通信 | T-box车联网通信 | ≤200ms | - | - | ≤100ms | 必需 |
| OTA功能 | OTA功能 | - | - | 推荐 | ||||
| 故障信息 | 车联网系统的故障信息 | - | - | 必需 | ||||
车辆运行数据采集系统
| AVP 系统对车辆运行数据采集系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 车辆运行数据采集系统 | 车辆运行数据采集系统 | 车辆运行数据采集、存储 | 车辆运行数据采集、存储 | ≤200ms | - | - | ≤100ms | 必需 |
| 故障信息 | 车联网系统的故障信息 | - | - | |||||
灯光系统
| AVP 系统对灯光系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 灯光系统 | 灯光控制 | 转向灯控制 | 控制转向灯打开、关闭 | ≤1s | - | - | ≤100ms | 必需 |
| 刹车灯控制 | 控制刹车灯打开、关闭 | - | - | |||||
| 倒车灯控制 | 控制倒车灯打开、关闭 | - | - | |||||
| 危险报警闪光灯控制 | 控制危险报警闪光灯打开、关闭 | - | - | |||||
| 近光灯控制 | 控制近光灯打开、关闭 | - | - | |||||
| 远光灯控制 | 控制远光灯打开、关闭 | - | - | 推荐 | ||||
| 雾灯控制 | 控制雾灯打开、关闭 | - | - | |||||
| 示廓灯控制 | 控制示廓灯打开、关闭 | - | - | |||||
| 灯光反馈 | 转向灯状态反馈 | 转向灯状态反馈 | ≤200ms | - | - | 推荐 | ||
| 刹车灯状态反馈 | 刹车灯状态反馈 | - | - | |||||
| 倒车灯状态反馈 | 倒车灯状态反馈 | - | - | |||||
| 危险报警闪光灯状态反馈 | 危险报警闪光灯状态反馈 | - | - | |||||
| 近光灯状态反馈 | 近光灯状态反馈 | - | - | |||||
| 远光灯状态反馈 | 远光灯状态反馈 | - | - | |||||
| 雾灯状态反馈 | 雾灯状态反馈 | - | - | |||||
| 示廓灯状态反馈 | 示廓灯状态反馈 | - | - | |||||
| 光线传感器反馈 | 光线传感器反馈 | - | - | |||||
| 故障信息 | 灯光系统的故障信息 | - | - | |||||
门锁车窗系统
| AVP 系统对门锁车窗系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 门锁车窗系统 | 门锁车窗控制 | 车门锁控制 | 控制车门锁上锁、解锁 | ≤1s | - | - | ≤100ms | 必需 |
| 尾门锁控制 | 控制尾门锁上锁、解锁 | - | - | |||||
| 电动车窗控制 | 控制车窗打开、关闭 | - | - | |||||
| 电动天窗控制 | 控制天窗打开、关闭 | - | - | |||||
| 门锁车窗反馈 | 车门锁状态反馈 | 车门锁状态反馈 | ≤200ms | - | - | 推荐 | ||
| 尾门锁状态反馈 | 尾门锁状态反馈 | - | - | |||||
| 机舱盖状态反馈 | 机舱盖状态反馈 | - | - | |||||
| 电动车窗状态反馈 | 电动车窗状态反馈 | - | - | |||||
| 电动天窗状态反馈 | 电动天窗状态反馈 | - | - | |||||
| 故障信息 | 门锁车窗系统的故障信息 | - | - | |||||
续航里程
| AVP 系统对续航里程的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 续航里程 | 续航里程反馈 | 用电状态(电动车) | 充电、放电、下电等状态 | ≤1s | - | - | ≤100ms | 必需 |
| 剩余里程(电量) | 剩余里程(动力电池剩余电量状态 | - | - | |||||
| 故障信息 | 系统的故障信息 | - | - | |||||
车内HMI系统
| AVP 系统对车内HMI系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 车内HMI系统 | 车内HMI系统 | 车内HMI系统 | 车内HMI系统显示AVP状态(激活、故障等) | ≤1s | - | - | ≤500ms | 必需 |
胎压监测系统
| AVP 系统对胎压监测系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 胎压监测系统 | 胎压监测系统 | 胎压监测系统 | 胎压监测系统状态反馈 | ≤1s | - | - | ≤500ms | 必需 |
| 故障信息 | 胎压监测系统的故障信息 | - | - | |||||
无钥匙进入及启动系统
| AVP 系统对无钥匙进入及启动系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 无钥匙进入及启动系统 | 身份校验 | 身份校验模式 | 身份校验系统模式切换:人工驾驶、自动驾驶、故障模式 | ≤1s | - | - | ≤500ms | 必需 |
| 身份校验状态反馈 | 反馈身份校验结果 | - | - | |||||
雨刮系统
| AVP 系统对雨刮系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 雨刮系统 | 雨刮控制 | 雨刮控制 | 控制雨刮运行速度等 | ≤1s | - | - | ≤500ms | 必需 |
| 雨量传感器 | 雨量状态反馈 | 雨量状态反馈 | - | - | 推荐 | |||
空调系统
| AVP 系统对空调系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 空调系统 | 空调控制 | 空调控制 | 控制空调开启、关闭 | ≤1s | - | - | ≤500ms | 推荐 |
| 空调状态反馈 | 空调状态反馈 | 空调状态反馈 | - | - | ||||
| 故障信息 | 空调系统的故障信息 | - | - | |||||
安全系统
| AVP 系统对安全系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 安全系统 | 安全带检测 | 安全带状态反馈 | 安全带状态反馈 | ≤1s | - | - | ≤500ms | 推荐 |
| 座椅检测 | 座椅状态反馈 | 座椅状态反馈 | - | - | ||||
电动后视镜系统
| AVP 系统对电动后视镜系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 电动后视镜系统 | 电动后视镜 | 电动后视镜控制 | 控制电动后视镜折叠、展开 | ≤1s | - | - | ≤500ms | 推荐 |
喇叭系统
| AVP 系统对喇叭系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 喇叭系统 | 喇叭系统 | 喇叭控制 | 控制喇叭开启、关闭 | ≤1s | - | - | ≤500ms | 推荐 |
车外交互HMI系统
| AVP 系统对车外交互HMI系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 车外交互HMI系统 | 车外交互HMI系统 | 车外交互HMI系统 | 车外交互HMI系统对外提醒(实现方式待定) | ≤1s | - | - | ≤500ms | 推荐 |
自动充电系统
| AVP 系统对 自动充电系统的要求 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 系统功能 | 子系统功能 | 信号 | 信号描述 | 响应延迟时间 | 范围 | 信号分辨率 | 指令周期 | 是否必需 |
| 自动充电系统 | 自动充电系统 | 自动充电系统 | 自动充电系统 | ≤1s | - | - | ≤500ms | 可选 |
| 故障信息 | 自动充电系统故障信息 | - | - | |||||
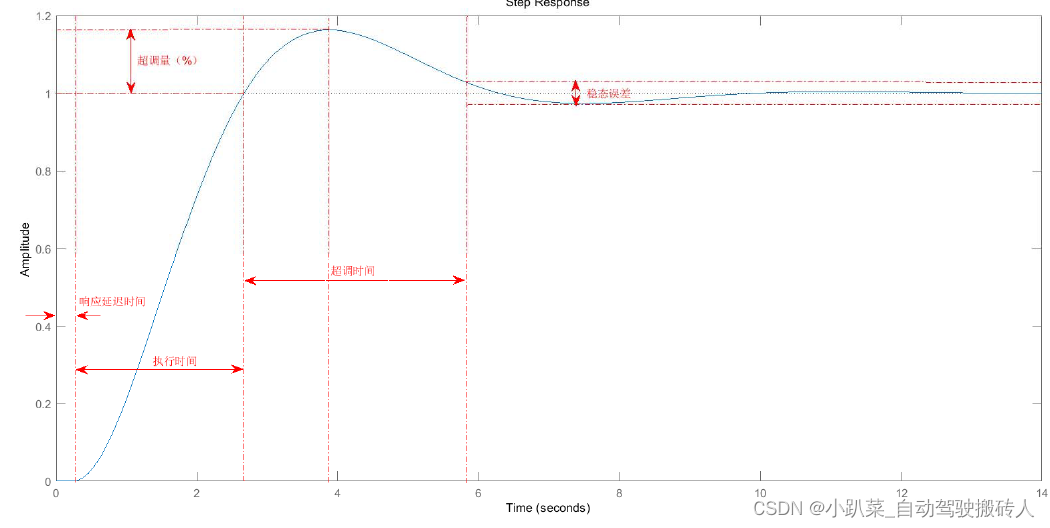
动态响应曲线
预期功能安全
典型事件
| SOTIF 典型事件分析 | |||
|---|---|---|---|
| 序号 | 确定的无法接受的触发事件描述 | 相关元素 | 限制描述 |
| 1 | 车辆在AVP 状态下自动驾驶,行人出现在本车道的危险区域,但行人被异物遮挡,如雨伞等,导致算法未识别出行人,车辆未进行制动而继续前行。 | 障碍物识别-视觉算法 | 行人的部分被遮挡,遮挡后的形状是算法学习的corner case |
| 2 | 车辆在AVP 状态下自动驾驶,行人出现在本车道的危险区域,但行人衣着颜色与环境背景颜色接近(如背景为绿化的颜色,而行人也穿着绿色衣服),导致算法未识别出行人,车辆未进行制 动而继续前进。 | 人的衣着颜色跟环境接近(障碍物从视觉角度融入环境) | |
| 3 | 行人出现在本车道的危险区域,但行人出现特殊角度、动作(如弯腰捡东西,坐在地下,蹲在地上等),导致算法未识别出行人,车辆未进行制动而继续前进。 | 人的行为、姿态比较罕见,而此时的形态是算法学习的corner case | |
| 4 | 车辆在AVP 状态下自动驾驶,行人或其他障碍物在本车道的危险区域快速移动,导致算法未识别出行人,车辆未进行制动而继续前进。 | 人(障碍物)的移动速度过快,在光线不好的情况下,导致曝光时间过长,成像模 糊。 | |
| 5 | 车辆在AVP 状态下自动驾驶,行进道路上出现断崖式坑洞。车辆未识别到该坑洞而继续向前行驶。 | 算法不能识别地上的坑洞 | |
| 6 | 车辆在AVP 状态下自动驾驶,行人出现在本车道的危险区域,但位于传感器FOV 边缘位置,导致无法识别出行人,车辆未进行制动而继续前进。 | 摄像头 | 识别算法在FOV 边缘地带的识别率较低 |
| 超声波雷达 | 超声波雷达的FOV 无法对所有危险区域进行覆盖 | ||
| 毫米波雷达 | 毫米波对速度预测失败,如果速度在毫米波FOV 切线方向不准,会导致预测失败; | ||
| 7 | 车辆在AVP 状态下自动驾驶,遇到雨雪天气或者泥泞环境,传感器受到雨雪,脏污的覆盖,导致传感器采集的数据收到影响,无法正确反应障碍物的特性,使得算法无法识别出障碍物。 | 摄像头 | 摄像头受雨雪的遮盖 |
| 超声波雷达 | 超声波雷达探头被雨雪遮盖后失去探测能力 | ||
| 毫米波雷达 | 毫米波雷达探头受雨雪遮盖失去探测能力 | ||
| 8 | 车辆在AVP 状态下自动驾驶,遇到光线过强或者过暗的天气,导致摄像头采集的障碍物图像受到影响,无法正确反应障碍物的视觉特性,使得视觉算法无法识别出障碍物,使得视觉算法无法识别出障碍物。 | 摄像头 | 摄像头受到过强或者过暗的光线影响 |
| 9 | 车辆在AVP 状态下自动驾驶,传感器安装位置受机械影响发生移动,导致传感器对障碍物采集的数据效果与预期设计产生偏差,无法正确反应障碍物的特性,使得算法无法识别出障碍物。 | 摄像头 | 摄像头安装的位置受到机械震动的影响发生移动 |
| 超声波雷达 | 超声波雷达安装的位置受到机械震动的影响发生移动 | ||
| 毫米波雷达 | 毫米波雷达安装的位置受到机械震动的影响发生移动 | ||
| 10 | 车辆在AVP 状态下自动驾驶,遇到雾霾天气,传感器能见度下降,导致无法正确采集到障碍物的特性,使得算法无法识别出障碍物。 | 摄像头 | 摄像头的视觉能见度受雾霾天气的影响 |
| 激光雷达 | 玻璃和雾霾影响很大;雾霾会导致激光雷达瞎了(屏幕全是点) | ||
| 11 | 车辆在AVP 状态下自动驾驶,路面不平整导致传感器出现抖动,影响对障碍物的检测效果,使得算法未识别出障碍物,或者测量不准。 | 摄像头 | 摄像头的成像效果受到抖动影响 |
| 超声波雷达 | 超声波雷达的探测角度受到车辆姿态影响导致测距不准 | ||
| 12 | 车辆在AVP 状态下自动驾驶,有导致传感器反射质量下降的材质外表的障碍物在行驶路径上(如行人穿着棉衣),导致传感器雷达出现漏检测。 | 毫米波雷达 | 毫米波雷达的反射质量跟材质有关:对金属最敏感,但是对其他材质如棉,检测距离少一半 |
| 超声波雷达 | 超声波雷达波的反射受材质的影响-表面光滑或者吸音的材料反射质量差 | ||
| 13 | 车辆在AVP 状态下自动驾驶,有障碍物突然进入行驶区域距离车辆较近的位置,导致传感器+执行器的响应时间不足以避免对其的碰撞 | 全部传感器+执行器 | 鬼探头,识别时间+执行制动时间不足 |