MuJoCo是一个机器人动力学仿真平台,它包括一系列的物理引擎、可视化工具和机器人模拟器等工具,用于研究和模拟机器人的运动和动力学特性。以下是MuJoCo的安装教程:
- 下载和安装MuJoCo Pro。可以从MuJoCo的官方网站上下载最新版本的安装包。根据操作系统的不同,选择相应的安装包进行下载和安装。
pip install mujoco安装完成后,启动MuJoCo Pro软件。在软件界面的顶部菜单栏中,点击“File”菜单,在下拉菜单中选择“Open”选项。
- 在弹出的文件选择对话框中,选择下载的MuJoCo模型文件(通常为.xml文件),并点击“Open”按钮。
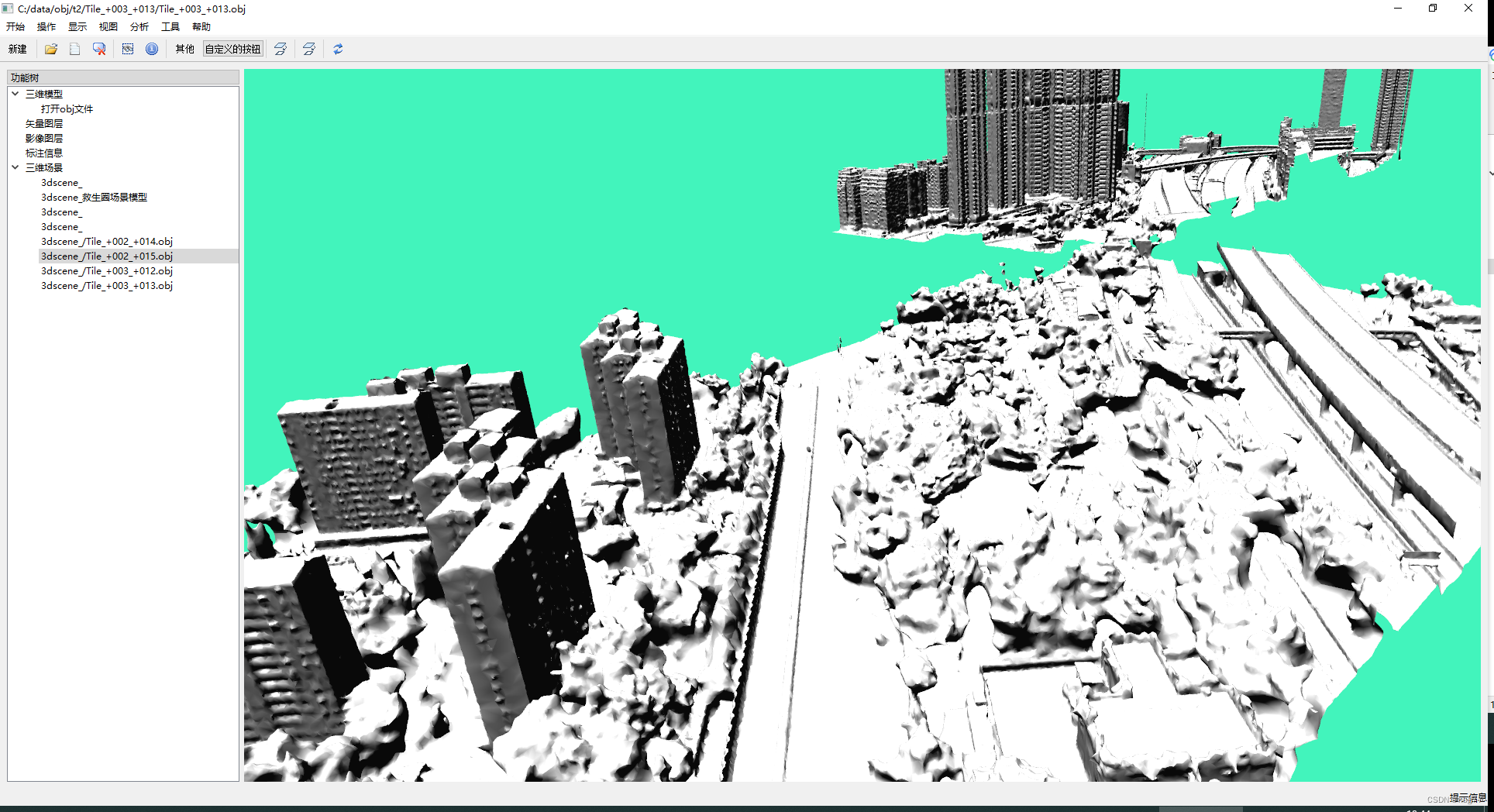
- 此时,MuJoCo Pro将加载所选择的模型文件,并在界面中显示该模型的3D场景。
- 在MuJoCo Pro的界面中,可以通过点击工具栏上的按钮来控制机器人的移动和姿态。还可以使用界面中的工具来调整机器人的参数和属性。
- 当在MuJoCo Pro中进行操作时,软件将根据机器人的动力学模型进行模拟,并实时更新3D场景中的机器人姿态和运动轨迹。
- 如果你需要进行更高级的模拟和控制,你可以使用MuJoCo提供的Python API来进行编程和控制。你可以参考MuJoCo的官方文档和教程来学习如何使用Python API。
官网教程:
Python Bindings - MuJoCo Documentation![]() https://mujoco.readthedocs.io/en/stable/python.html
https://mujoco.readthedocs.io/en/stable/python.html