目录
什么是红黑树
编辑
红黑树的性质
红黑树的辨析
红黑树实现
红黑树的结构
红黑树的插入
红黑树的调试
红黑树平衡判断
什么是红黑树

这里引入一下NIL节点的概念:
NIL节点也称为空节点或外部节点,是红黑树中一种特殊的节点类型。NIL节点不存储实际的数据,它们的作用是协助维护红黑树的结构和性质,同时也简化了一些操作的实现。在红黑树中,每个节点要么是红色的,要么是黑色的,而每个节点都有左子节点和右子节点。NIL节点是所有叶子节点的虚拟父节点,它们都是黑色的,且不包含任何子节点。这意味着,如果一个节点没有左子节点或右子节点,那么它的对应子节点就是一个NIL节点。通过将红黑树的所有叶子节点都替换为NIL节点,我们可以保证红黑树的每个节点都至少有一个子节点。这样,我们就可以通过判断节点的子节点是否为NIL节点来处理边界情况,避免了在处理节点时需要特殊处理叶子节点的情况。
红黑树的性质

因此我们在设计红黑树结构时,根节点特殊设置为BLACK,新增节点默认构造为RED
因为插入一个新的黑色节点,就需要在所有路径中都要新增一个黑色节点,实现十分困难,就算能实现,也消耗巨大。
红黑树的辨析
如上图:红黑树的5个性质

对于图一:我们需要辨析,没有红节点,一定不是红黑树吗?我们看性质1,就知道图1也满足红黑树的要求
对于图二:我们如果画出红色节点的NIL节点,会发现这条路径仅有2个黑色节点,而其他路径为3个黑色节点,黑色节点数目不同,所以不是红黑树 。
所以我们知道了,判断红黑树时需要借助NIL节点来判断。
红黑树实现
红黑树的结构
回到第一张图片:红黑树是一种搜索二叉树,那么总体上的结构也是 树 和 树的节点,不同的是借助枚举类型来实现红黑的颜色
// 实现颜色
enum Colour
{
RED,
BLACK
};
template<class K, class V>
struct RBTreeNode {
// 三叉链结构
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
// 键值对
pair<K, V> _kv;
// 实现颜色
Colour _col;
RBTreeNode(const pair<K, V>& kv)
: _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _kv(kv)
,_col(RED) // 默认新节点红色 根节点为黑
{}
};
template<class K, class V>
class RBTree {
typedef RBTreeNode<K, V> Node;
public:
private:
Node* _root = nullptr;
};
红黑树的插入
基础的插入还是:判断key的值然后新建节点插入
bool insert(const pair<K, V>& kv) {
if (_root == nullptr) {
_root = new Node(kv);
// 根节点默认为黑色
_root->_col = BLACK;
return true;
}
Node* parent = nullptr;
Node* current = _root;
while (current != nullptr) {
parent = current;
if (current->_kv.first < kv.first)
current = current->_right;
else if (current->_kv.first > kv.first)
current = current->_left;
else
return false;
}
current = new Node(kv);
// 插入节点默认为红色
current->_col = RED;
// 通过大小插入左右
if (parent->_kv.first < kv.first)
parent->_right = current;
else
parent->_left = current;
current->_parent = parent;
// 实现颜色的变换
return true;
}接着我们开始分析红黑树的插入情况!
注意一点:在红黑树中,不能随便增加黑色节点,因为假设在某一局部子树中增加黑色节点,其他部分子树的黑色节点可能会少于这一条路径
情况一:不用变色,完美符合红黑树性质,不用旋转,保持较好平衡

这里我们可以看出当插入节点的parent为黑色的时候,插入节点不需要进行变色,因为插入节点默认为红色,只要父节点不为红色就不用调整颜色,如果为红色就不符合性质
情况二:需要变色,插入不符合红黑树性质,不用旋转,保持较好平衡

这里呼应了情况一:插入节点的父节点为红色,需要变色,这里实现结束把父节点改成黑色,把祖父节点改为红色,把祖父节点的另一个子节点也改为黑色,说到这里大概就知道怎么实现了,我们先不着急,先继续研究
总结一下:仅变色时的一般规律

注意这里的抽象图带有a,b,c,d,e这些可能是带有一个黑色节点的子树。并且current不一定是新增节点,也有可能是调整后的节点。我们在后面会有讲解
这里我们开始引入Node* uncle节点来辅助我们分析

如果祖父节点的父节点为黑色,那么不用调整。当祖父节点的父亲为红色节点,需要将新的current = grandparent来向上继续调整!
稍微演示一下:
这里最终头上红色节点也可能需要向上调整!

情况三:需要变色 并且需要 旋转
(1) 当current = parent->_left

这里我们看出来,如果仅仅靠着变色还是无法解决问题,而是需要通过变色后来判断是否需转。红黑树判断旋转的方式是通过比较插入节点的祖父节点、父节点和插入节点的位置关系,来确定需要进行的旋转操作。
对于AVL树来说,通过每个节点上的平衡因子来研究是否需要旋转。

u存在且为黑过程

(2) 当current = parent->_right
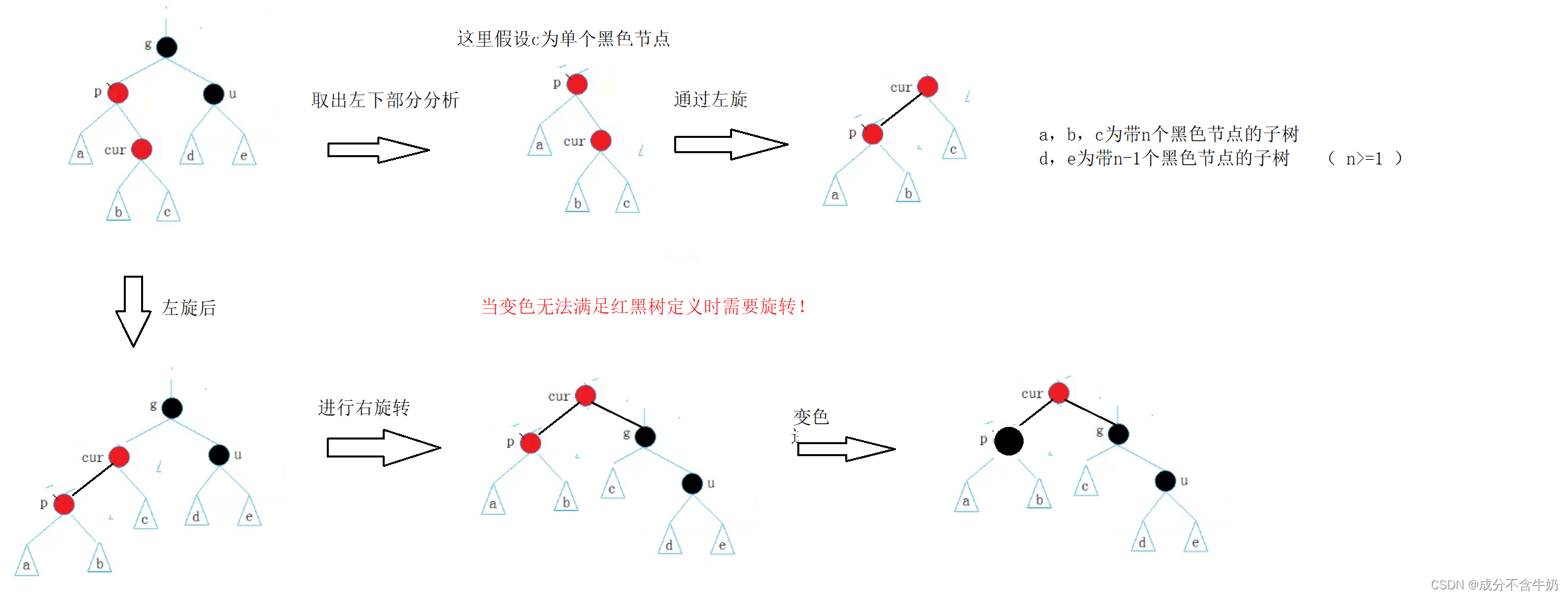
特殊情况:这里大家假设a,b,c为一个黑色节点,d,e为一个红色节点来分析画图。
回顾一下红黑树旋转的情况,我们如何在代码中体现:
1.首先我们在通过上述分析时发现,当变色无法变为红黑树的时候,就需要旋转一下才能通过变色成为红黑树
2.其次我们也总结出了:当current和parent均为红色,uncle不存在或者是为黑色的情况就需要进行旋转和变色
3.这里current的位置可以在parent的左或者右,这里就需要分成两种,再接着uncle可能在grandparent的左或者右,又是两种,所以需要分为if else 嵌套if else
4.最终我们完成旋转和变色
这一部分要注意current不一定是新增节点!
current可能是插入节点经过调整后的grandparent,或者是不断调整后的ggggggrandparent

那么代码大致我们就可以写出来了,旋转部分的代码这里有具体讲解数据结构与算法:AVL树-CSDN博客
bool insert(const pair<K, V>& kv)
{
// 1.先插入节点
if (_root == nullptr)
{
_root = new Node(kv);
// 根节点默认为黑色
_root->_col = BLACK;
return true;
}
Node* parent = nullptr;
Node* current = _root;
while (current != nullptr)
{
parent = current;
if (current->_kv.first < kv.first)
current = current->_right;
else if (current->_kv.first > kv.first)
current = current->_left;
else
return false;
}
current = new Node(kv);
// 新增节点默认为红色
current->_col = RED;
// 通过大小插入左右
if (parent->_kv.first < kv.first)
parent->_right = current;
else
parent->_left = current;
current->_parent = parent;
// 2.实现颜色的变换 情况来回的迭代直至不满足循环 退出时就满足了红黑树
while (parent != nullptr && parent->_col == RED)
{
/*进入循环情况:同时满足父节点不为空,且为红色
原因: 如果父节点为空,则current为_root
如果父节点为黑色,就不用更新颜色了*/
Node* grandparent = parent->_parent;
// 找到叔叔节点位置
if (parent == grandparent->_left)
{
// uncle在父亲右边
Node* uncle = grandparent->_right;
// 情况一:叔叔存在,且叔叔为红色
if (uncle != nullptr && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandparent->_col = RED;
// 继续向上调整
current = grandparent;
parent = current->_parent;
}
// 情况二:叔叔不存在 或者 叔叔存在但是颜色为黑色
else
{
if (current == parent->_left)
{
RotateR(grandparent);
parent->_col = BLACK;
grandparent->_col = RED;
}
// current在右边
else
{
RotateL(parent);
RotateR(grandparent);
// 通过旋转后,旋转内部就已经完成了指针的指向
current->_col = BLACK;
grandparent->_col = RED;
}
// 直接退出循环即可,也可以不退出,因为父亲已经为黑色了
break;
}
}
else
{
// uncle在父亲左边
Node* uncle = grandparent->_left;
if (uncle != nullptr && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandparent->_col = RED;
// 继续向上调整
current = grandparent;
parent = current->_parent;
}
else
{
if (current == parent->_right)
{
RotateL(grandparent);
parent->_col = BLACK;
grandparent->_col = RED;
}
// current在左边
else {
// 注意这里单旋的节点不同
RotateR(parent);
RotateL(grandparent);
grandparent->_col = RED;
current->_col = BLACK;
}
break;
}
}
}
// 保持根节点始终为黑色,当current到达根节点可能为RED,这里就在外部变黑
_root->_col = BLACK;
return true;
}
// 左单旋
void RotateL(Node* root)
{
Node* parent = root;
Node* subR = parent->_right;
Node* subRL = subR->_left;
Node* grandparent = parent->_parent;
subR->_left = parent;
parent->_right = subRL;
if (subRL != nullptr)
subRL->_parent = parent;
parent->_parent = subR;
parent = subR;
if (grandparent == nullptr)
{
_root = parent;
}
else
{
if (grandparent->_left == root)
grandparent->_left = parent;
else
grandparent->_right = parent;
}
parent->_parent = grandparent;
}
// 右单旋
void RotateR(Node* root)
{
Node* parent = root;
Node* subL = parent->_left;
Node* subLR = subL->_right;
Node* grandparent = parent->_parent;
subL->_right = parent;
parent->_left = subLR;
if(subLR!=nullptr)
{
subLR->_parent = parent;
}
parent->_parent = subL;
parent = subL;
if (grandparent == nullptr)
{
_root = parent;
}
else
{
if (grandparent->_left == root)
grandparent->_left = parent;
else
grandparent->_right = parent;
}
parent->_parent = grandparent;
}红黑树的调试
说到调试,对比以往的学习来说,红黑树的测试比较困难,所以我们有必要来学习一下
先放个测试的代码
void test1() {
RBTree<string, string> RB_tree;
RB_tree.insert(make_pair("zhong", "2022044026"));
RB_tree.insert(make_pair("Hello", "2022044026"));
RB_tree.insert(make_pair("world", "2022044026"));
RB_tree.insert(make_pair("C++", "2022044026"));
RB_tree.insert(make_pair("CPP", "2022044026"));
RB_tree.insert(make_pair("JAVA", "2022044026"));
RB_tree.insert(make_pair("PYTHON", "2022044026"));
RB_tree.inOrder();
}通过调试中的监视图可以查看这棵树节点的红黑、相对地址
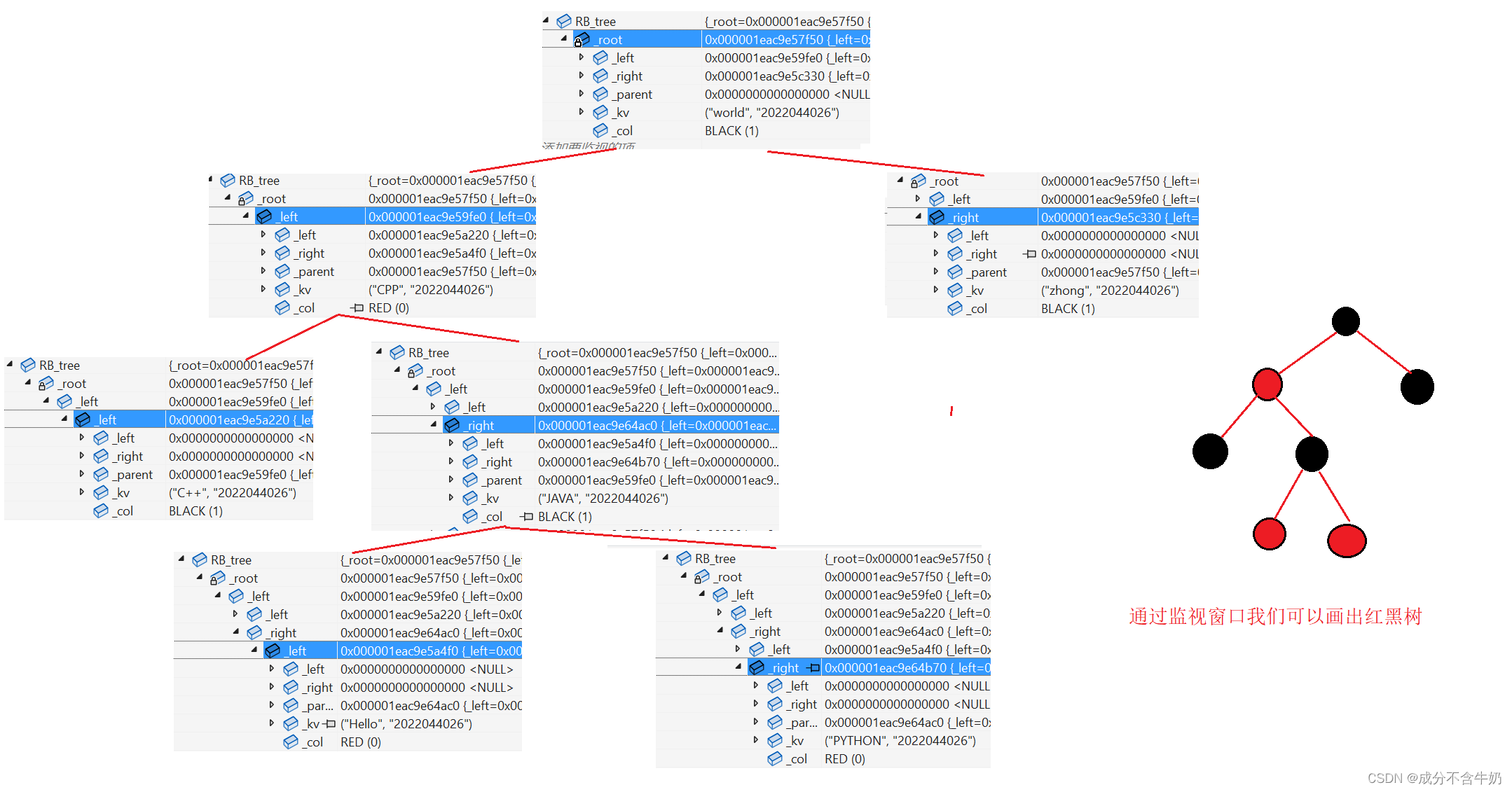
同时我们可以把 string类型换为int类型来测试画图,放一个样例,大家可以试着画一下
void test2() {
int arr[] = {16, 3, 7, 11, 9, 26, 18, 14, 15 };
RBTree<int, int> RB_tree;
for (auto& e : arr) {
RB_tree.insert(make_pair(e, e));
// cout << "insert: " << e << " -> " << RB_tree.ifBalance() << endl;
}
RB_tree.inOrder();
cout << "是否平衡:" << RB_tree.ifBalance() << endl;
}红黑树平衡判断
判断红黑树的平衡,我们首先知道红黑树的平衡与AVL树不同的是,红黑树实现的是相对平衡,从红黑树的性质来说,判断红黑树是否平衡,主要是满足红黑树的性质
1.根节点为黑色
2.每条路径的黑色节点数目一致
3.不存在连续的红色节点
那么判断红黑树的平衡就有迹可循了!直接上代码了
bool check(Node* root, int blackNum, const int flag)
{
if (root == nullptr)
{
// cout << "黑色节点数目:" << blackNum << endl;
if (blackNum != flag)
{
cout << "路径上的黑色节点数存在不同" << endl;
return false;
}
return true;
}
if (root->_col == RED && root->_parent->_col == RED)
{
// 子节点和父节点均为红色,不符合红黑树
cout << "存在连续的红色节点" <<endl;
return false;
}
if (root->_col == BLACK)
++blackNum;
// 传值调用,只影响函数块,上一层不影响下一层
return check(root->_left, blackNum, flag) && check(root->_right, blackNum, flag);
}
// 判断是否平衡
bool ifBalance()
{
if (_root == nullptr)
return true;
if (_root->_col == RED)
return false;
// 作为辅助判断
int flag = 0;
Node* current = _root;
while (current != nullptr)
{
if (current->_col == BLACK)
flag++;
current = current->_left;
}
// 设置一个flag值记录某一条路径的长度
// 如果flag不等于任何一条路径的长度就表示某一条路径黑色节点数有误
cout << "flag大小为:" << flag << endl;
// 根节点到当前节点路径上黑色节点数量
int blackNum = 0;
return check(_root, blackNum, flag);
}到了这里,我们初步学习了红黑树的原理