玩转 STM32 单片机,肯定离不开串口。串口使用一个称为串行通信协议的协议来管理数据传输,该协议在数据传输期间控制数据流,包括数据位数、波特率、校验位和停止位等。由于串口简单易用,在各种产品交互中都有广泛应用。
但在使用串口通讯的时候,我们并不知道对方会发送多少个数据,也不知道数据什么时候发送完,简单来讲就是:如何确保收到一帧完整的数据?
串口发送的数据有长有短,如果没有接收完整,肯定会影响后续业务的处理。为了接收不定长数据,常见的处理方法有:
1. 固定格式
比如双方约定,一帧的数据以 AA BB 开头,以 BB AA 结尾,这样在从机接收数据的时候,一旦收到 AA BB 字符,就知道对方要发来一个数据包了,然后就把后面发来的数据保存起来,直到接收到 BB AA 为止。
这种方法简单高效,但缺点就是需要每个字符都进行判断,浪费 CPU 资源,增加功耗。
2. 接收中断+超时判断
串口接收到一个数据时,就会触发接收中断。但如何判断数据已经发送完了呢?
通常来讲,两帧数据之间,会有个时间间隔。因此,我们可以使用一个计时器,如果在一个固定的时间点里没接收到新的字符,则认为一帧数据接收完成了。
3. 空闲中断
串口在空闲时,也就是说串口在一段时间里没有接收到新数据,则会触发空闲中断。细心的同学应该发现了,空闲中断实际上跟上面的超时判断是一样样的,只不过空闲中断是硬件自带,但超时判断需要我们自己实现。
所以,一旦接收到空闲中断,可以认为接收到一帧完整的数据。
但是,空闲中断并不是所有的 MCU 都具备,一般高端一点的 MCU 才有,低端一些的 MCU 并没有空闲中断。
1. 源码下载及前置阅读
本文首发 良许嵌入式网 :https://www.lxlinux.net/e/ ,欢迎关注!
本文所涉及的源码及安装包如下(由于平台限制,请点击以下链接阅读原文下载):
https://www.lxlinux.net/e/stm32/stm32-usart-receive-data-using-idle-dma.html
如果你是个零基础的小白,连 STM32 都没见过,我也给你准备了一个保姆级教程,手把手教你搭建好 STM32 开发环境,并教你如何下载程序,简直业界良心!
https://www.lxlinux.net/e/stm32/stm32-quick-start-for-beginner.html
如果你连代码都不知道怎么烧录到 STM32 的,可以参考下文,提供了 5 种代码烧录方式:
https://www.lxlinux.net/e/stm32/five-ways-to-flash-program-to-stm32.html
如果你想自己搭一个属于自己的工程模板,可以参考下面这篇文章:
https://www.lxlinux.net/e/stm32/create-stm32-hal-project-template.html
在本文中,我们详细来介绍如何使用接收中断+超时判断完成不定长数据的接收,对于接收中断的接收,请查看下文:
https://www.lxlinux.net/e/stm32/stm32-usart-receive-data-using-rxne-time-out.html
2. 什么是空闲中断?
前文已经提到,当接收到一字节数据时,会触发接收中断,对应串口状态寄存器第 5 位被置 1 ;如果串口在空闲时,则会触发空闲中断,第 4 位被置 1 ,如下图所示:

在中断服务函数里,记得一定要清除 IDLE 位,否则将一直触发空闲中断,影响后续的业务处理。
3. DMA
3.1 什么是DMA?
令人头秃的描述:
DMA(Direct Memory Access,直接存储器访问)提供在外设与内存、存储器和存储器、外设与外设之间的高速数据传输使用。它允许不同速度的硬件装置来沟通,而不需要依赖于 CPU ,在这个时间中,CPU 对于内存的工作来说就无法使用。
简单描述:
就是一个数据搬运工!!
3.2 DMA的意义
代替 CPU 搬运数据,为 CPU 减负。
数据搬运的工作比较耗时间;
数据搬运工作时效要求高(有数据来就要搬走);
没啥技术含量(CPU 节约出来的时间可以处理更重要的事)。

3.3 搬运什么数据?
存储器、外设
这里的外设指的是 spi、usart、iic、adc 等基于APB1 、APB2 或 AHB 时钟的外设,而这里的存储器包括自身的闪存(flash)或者内存(SRAM)以及外设的存储设备都可以作为访问地源或者目的。
三种搬运方式:
- 存储器→存储器(例如:复制某特别大的数据 buf )
- 存储器→外设 (例如:将某数据 buf 写入串口 TDR 寄存器)
- 外设→存储器 (例如:将串口 RDR 寄存器写入某数据 buf )
存储器→存储器
存储器→外设

外设→存储器

3.4 DMA 控制器
STM32F103 有 2 个 DMA 控制器,DMA1 有 7 个通道,DMA2 有 5 个通道。对于 STM32F103C8T6 这颗芯片,只有 DMA1 。
一个通道每次只能搬运一个外设的数据!! 如果同时有多个外设的 DMA 请求,则按照优先级进行响应。
DMA1 有 7 个通道:
DMA2 有 5 个通道
3.5 DMA及通道的优先级
优先级管理采用软件+硬件:
软件: 每个通道的优先级可以在 DMA_CCRx 寄存器中设置,有4个等级
最高级>高级>中级>低级
硬件: 如果 2 个请求,它们的软件优先级相同,则较低编号的通道比较高编号的通道有较高的优先权。
比如:如果软件优先级相同,通道 2 优先于通道 4
3.6 DMA传输方式
DMA_Mode_Normal(正常模式)
一次 DMA 数据传输完后,停止 DMA 传送 ,也就是只传输一次
DMA_Mode_Circular(循环传输模式)
当传输结束时,硬件自动会将传输数据量寄存器进行重装,进行下一轮的数据传输。 也就是多次传输模式
3.7 指针递增模式
外设和存储器指针在每次传输后可以自动向后递增或保持常量。当设置为增量模式时,下一个要传输的地址将是前一个地址加上增量值。


4. 硬件准备
- STM32 核心板
本文使用 STM32F103C8T6 核心板,非常便宜,某宝上 10 元左右(关键词:STM32 核心板),一杯奶茶的钱不到。

核心板最大的优点是便宜简单,缺点就是需要根据需求自己搭一些电路,对你的动手能力要求比较高。
上面所推荐的这块核心板,主控芯片是 STM32103C8T6 ,64K flash,20K RAM,4 个定时器,3 个串口,网络上资料好几吨,非常适合初学者入门,强烈推荐。
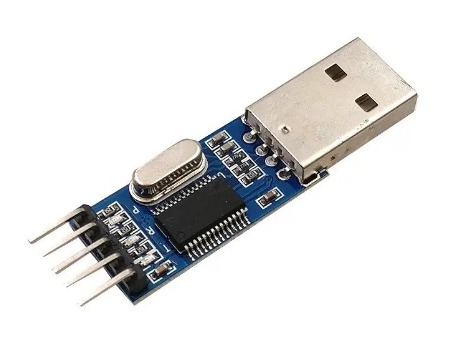
- USB 转 TTL
这种设备主要作用是用来调试或下载程序。价格也很便宜,普遍 5~8 元。
- ST-Link
ST-Link 是一种用于 STM32 微控制器的调试和编程工具,它可以通过 SWD 或 JTAG 接口与开发板进行通信。一般也很便宜,七八元左右。

5. 编程实战
在本实验中,我们将串口 1 作为 log 输出端口,串口 2 作为本次实验的接收端口。
因此我们需要提前创建 uart2 模块,包含 uart2.c 及 uart2.h 两个文件,并加载进工程模板。

5.1 串口初始化
串口的初始化大家应该不陌生,主要步骤为:
- 定义串口句柄
uart2_handle,并调用HAL_UART_Init进行初始化; - 初始化串口底层函数,调用
HAL_UART_MspInit函数。
第一步在 uart2.c 文件里进行:
UART_HandleTypeDef uart2_handle;
void uart2_init(uint32_t baudrate)
{
uart2_handle.Instance = UART2_INTERFACE; /* UART2 */
uart2_handle.Init.BaudRate = baudrate; /* 波特率 */
uart2_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 数据位 */
uart2_handle.Init.StopBits = UART_STOPBITS_1; /* 停止位 */
uart2_handle.Init.Parity = UART_PARITY_NONE; /* 校验位 */
uart2_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */
uart2_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */
uart2_handle.Init.OverSampling = UART_OVERSAMPLING_16; /* 过采样 */
HAL_UART_Init(&uart2_handle); /* 使能UART2 */
}第二步在 usart.c 文件里进行,其实也可以在 uart2.c 文件里做,但我懒~
在最下面两行代码,我们使用 __HAL_UART_ENABLE_IT() 使能接收中断及空闲中断。
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef gpio_init_struct;
if (huart->Instance == USART_UX) /* 如果是串口1,进行串口1 MSP初始化 */
{
....
// 节略串口1相关代码
....
}
else if (huart->Instance == UART2_INTERFACE) /* 如果是UART2 */
{
UART2_TX_GPIO_CLK_ENABLE(); /* 使能UART2 TX引脚时钟 */
UART2_RX_GPIO_CLK_ENABLE(); /* 使能UART2 RX引脚时钟 */
UART2_CLK_ENABLE(); /* 使能UART2时钟 */
gpio_init_struct.Pin = UART2_TX_GPIO_PIN; /* UART2 TX引脚 */
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */
gpio_init_struct.Pull = GPIO_NOPULL; /* 无上下拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(UART2_TX_GPIO_PORT, &gpio_init_struct); /* 初始化UART2 TX引脚 */
gpio_init_struct.Pin = UART2_RX_GPIO_PIN; /* UART2 RX引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_NOPULL; /* 无上下拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(UART2_RX_GPIO_PORT, &gpio_init_struct); /* 初始化UART2 RX引脚 */
HAL_NVIC_SetPriority(UART2_IRQn, 0, 0); /* 抢占优先级0,子优先级0 */
HAL_NVIC_EnableIRQ(UART2_IRQn); /* 使能UART2中断通道 */
__HAL_UART_ENABLE_IT(huart, UART_IT_RXNE); /* 使能UART2接收中断 */
__HAL_UART_ENABLE_IT(huart, UART_IT_IDLE); /* 使能UART2总线空闲中断 */
}
}5.2 串口中断服务函数
前文已经提到,串口触发到一次接收中断,则代表接收到一个字符,我们就可以把这个字符放到接收缓冲区里。这个过程与上一篇文章一样样,可以参考下文:
【STM32串口接收不定长数据(接收中断+超时判断)】
具体代码实现如下:
void UART2_IRQHandler(void)
{
uint8_t receive_data = 0;
if(__HAL_UART_GET_FLAG(&uart2_handle, UART_FLAG_RXNE) != RESET){ //获取接收RXNE标志位是否被置位
if(uart2_rx_len >= sizeof(uart2_rx_buf)) //如果接收的字符数大于接收缓冲区大小,
uart2_rx_len = 0; //则将接收计数器清零
HAL_UART_Receive(&uart2_handle, &receive_data, 1, 1000); //接收一个字符
uart2_rx_buf[uart2_rx_len++] = receive_data; //将接收到的字符保存在接收缓冲区
}
...
// 省略空闲中断代码
...
}串口触发一次空闲中断,则代表接收到一帧数据,也就是收到了一个完整的数据包了,我们就可以将收到的数据包进行处理(比如打印出来),代码如下:
void UART2_IRQHandler(void)
{
...
// 省略接收中断代码
...
if (__HAL_UART_GET_FLAG(&uart2_handle, UART_FLAG_IDLE) != RESET) //获取接收空闲中断标志位是否被置位
{
printf("recv: %s\r\n", uart2_rx_buf); //将接收到的数据打印出来
uart2_rx_clear();
__HAL_UART_CLEAR_IDLEFLAG(&uart2_handle); //清除UART总线空闲中断
}
}在上面的代码里,一定要记得调用 __HAL_UART_CLEAR_IDLEFLAG() 函数清除 UART 总线空闲中断,否则空闲中断一直处于触发状态,影响下一次接收。
判断是否收到接收/空闲中断,需要用到的是 __HAL_UART_GET_FLAG() 函数,接收中断判断的是 UART_FLAG_RXNE 标志位,而空闲中断判断的是 UART_FLAG_IDLE 标志位。
串口中断服务函数完整代码如下(就是将上面两部分代码合二为一):
void uart2_rx_clear(void)
{
memset(uart2_rx_buf, 0, sizeof(uart2_rx_buf)); //清空接收缓冲区
uart2_rx_len = 0; //接收计数器清零
}
void UART2_IRQHandler(void)
{
uint8_t receive_data = 0;
if(__HAL_UART_GET_FLAG(&uart2_handle, UART_FLAG_RXNE) != RESET){ //获取接收RXNE标志位是否被置位
if(uart2_rx_len >= sizeof(uart2_rx_buf)) //如果接收的字符数大于接收缓冲区大小,
uart2_rx_len = 0; //则将接收计数器清零
HAL_UART_Receive(&uart2_handle, &receive_data, 1, 1000); //接收一个字符
uart2_rx_buf[uart2_rx_len++] = receive_data; //将接收到的字符保存在接收缓冲区
}
if (__HAL_UART_GET_FLAG(&uart2_handle, UART_FLAG_IDLE) != RESET) //获取接收空闲中断标志位是否被置位
{
printf("recv: %s\r\n", uart2_rx_buf); //将接收到的数据打印出来
uart2_rx_clear();
__HAL_UART_CLEAR_IDLEFLAG(&uart2_handle); //清除UART总线空闲中断
}
}对应的 uart2.h 文件完整代码如下:
#include <stdint.h>
#include "usart.h"
/* 引脚定义 */
#define UART2_TX_GPIO_PORT GPIOA
#define UART2_TX_GPIO_PIN GPIO_PIN_2
#define UART2_TX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0)
#define UART2_RX_GPIO_PORT GPIOA
#define UART2_RX_GPIO_PIN GPIO_PIN_3
#define UART2_RX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0)
#define UART2_INTERFACE USART2
#define UART2_IRQn USART2_IRQn
#define UART2_IRQHandler USART2_IRQHandler
#define UART2_CLK_ENABLE() do{ __HAL_RCC_USART2_CLK_ENABLE(); }while(0)
/* 错误代码 */
#define UART_EOK 0 /* 没有错误 */
#define UART_ERROR 1 /* 通用错误 */
#define UART_ETIMEOUT 2 /* 超时错误 */
#define UART_EINVAL 3 /* 参数错误 */
/* UART收发缓冲大小 */
#define UART2_RX_BUF_SIZE 128
#define UART2_TX_BUF_SIZE 64
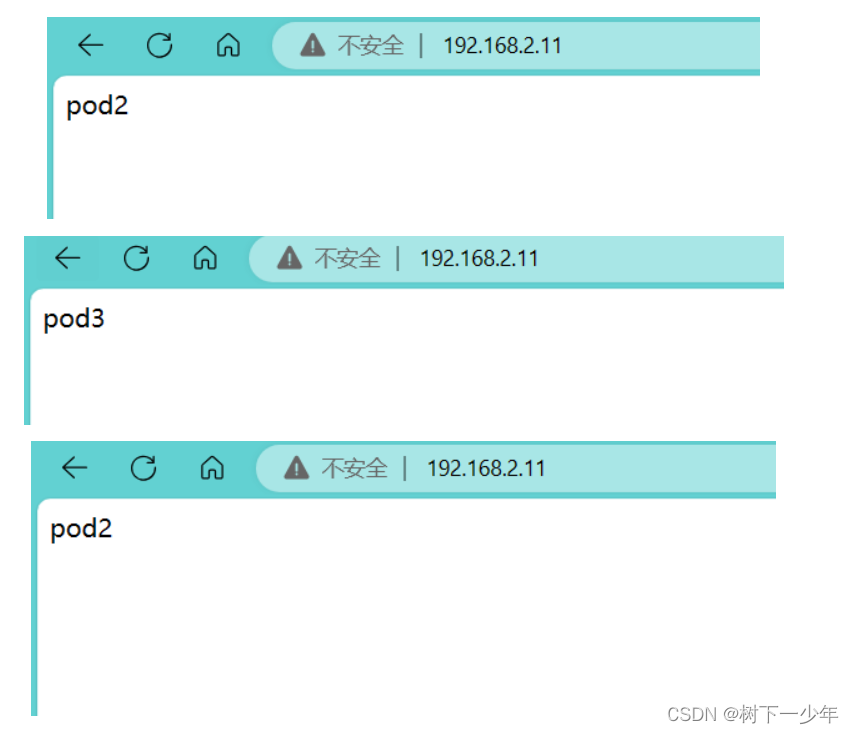
void uart2_init(uint32_t baudrate);到这里,实际上我们已经实现了使用空闲中断接收不定长数据的逻辑代码了,烧进板子后效果如下:

对于大多数应用场景下,这种串口接收不定长数据的处理方式已经足够用了。
但如果你串口每次接收的数据量过于庞大,那么就可以请出 DMA 这个数据搬运工了,一旦接收到数据则立马搬走,不占用 CPU 资源。
5.3 加入DMA
既然需要用到 DMA 外设,则在 BSP 目录下创建 dma.c 及 dma.h 两个文件,并加载进工程文件。

在 dma.c 文件里,我们要做的事情就是初始化 DMA 外设,实际上就是指定数据从哪里来、到哪里去,以及数据长度等等。
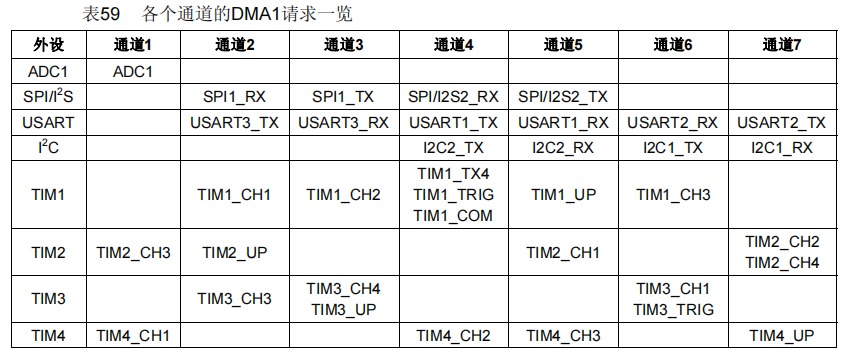
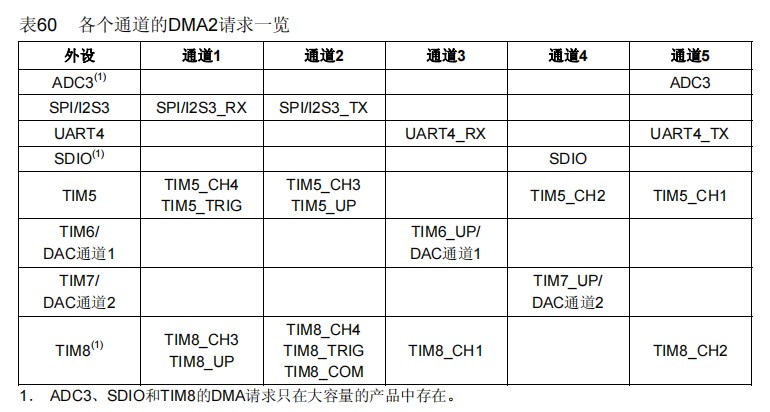
由于我们使用的是串口2 RX 通道,根据下图可知,用到的 DMA 通道为 DMA1_Channel6 (STM32F103C8T6只有 DMA1 )。
在初始化的最后,一定要记得调用 HAL_UART_Receive_DMA() 函数开启 DMA 接收,否则 DMA 这个搬运工就算请过来了,他还是依然不为你工作。
详细代码如下:
void dma_init(void)
{
// UART2 RX DMA配置
__HAL_RCC_DMA1_CLK_ENABLE(); /* DMA1时钟使能 */
dma_handle.Instance = DMA1_Channel6; /* USART2_RX使用的DMA通道为: DMA1_Channel6 */
dma_handle.Init.Direction = DMA_PERIPH_TO_MEMORY; /* 外设到存储器模式 */
dma_handle.Init.PeriphInc = DMA_PINC_DISABLE; /* 外设非增量模式 */
dma_handle.Init.MemInc = DMA_MINC_ENABLE; /* 存储器增量模式 */
dma_handle.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; /* 外设数据长度:8位 */
dma_handle.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; /* 存储器数据长度:8位 */
dma_handle.Init.Mode = DMA_NORMAL; /* 外设流控模式 */
dma_handle.Init.Priority = DMA_PRIORITY_LOW; /* 低优先级 */
HAL_DMA_Init(&dma_handle);
__HAL_LINKDMA(&uart2_handle, hdmarx, dma_handle); /* 将DMA与USART2联系起来(发送DMA) */
HAL_UART_Receive_DMA(&uart2_handle, uart2_rx_buf, UART2_RX_BUF_SIZE); /* 开启DMA接收 */
}在串口中断服务函数里,我们可以将接收中断相关代码全部去掉(因为已经有了 DMA 这个搬运工了,没必要让 CPU 一个个字符转移数据了)。
我先把代码贴上来,再详细讲解。
void UART2_IRQHandler(void)
{
if (__HAL_UART_GET_FLAG(&uart2_handle, UART_FLAG_IDLE) != RESET){ //获取接收IDLE标志位是否被置位
__HAL_UART_CLEAR_IDLEFLAG(&uart2_handle);
HAL_UART_DMAStop(&uart2_handle); //停止DMA传输,防止干扰
uart2_rx_len = UART2_RX_BUF_SIZE - __HAL_DMA_GET_COUNTER(&dma_handle); //获取接收到的数据长度
printf("recv: %s, recv_len: %d\r\n", uart2_rx_buf, uart2_rx_len);
uart2_rx_clear();
HAL_UART_Receive_DMA(&uart2_handle, uart2_rx_buf, UART2_RX_BUF_SIZE); //重新开启DMA传输
}
}上面的代码有几个要点需要解释一下:
- 停止 DMA 传输
当我们收到空闲中断时,实际上 DMA 已经帮我们把所有的数据搬运到了接收缓冲区了,此时我们可以先把 DMA 传输关闭掉,防止干扰到后续的操作。
- 获取接收到的数据长度
__HAL_DMA_GET_COUNTER() 函数表示 DMA 中待接收的数据长度。什么意思呢?假设我需要 DMA 接收 100 个字符的数据量,但现在实际上只接收到了 30 个字符,那么待接收的数据长度为 70 ,也就是 __HAL_DMA_GET_COUNTER() 函数的返回值为 70 。
所以,我们已经接收到的数据长度,等于接收缓冲区的长度,减去待接收的数据长度,翻译成代码就是:
uart2_rx_len = UART2_RX_BUF_SIZE - __HAL_DMA_GET_COUNTER(&dma_handle);- 重新开启 DMA 传输
一帧数据处理完成之后,我们肯定要进行下一帧数据的接收,所以需要调用 HAL_UART_Receive_DMA() 重新开启 DMA 传输,否则数据只接收一帧之后就罢工了。
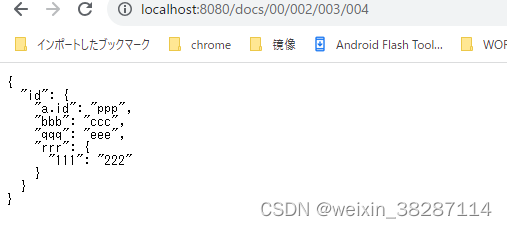
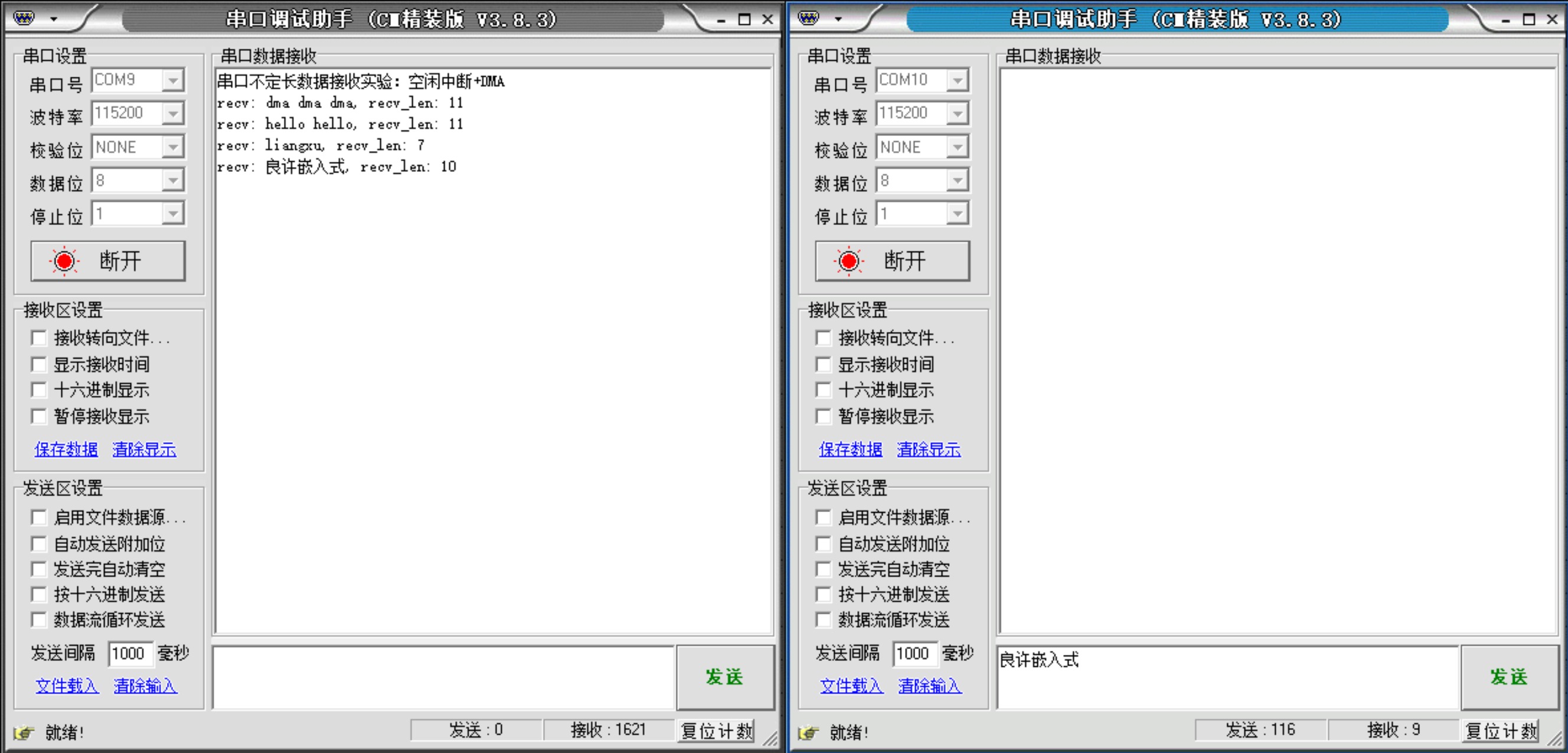
到此 DMA 就加入成功了,烧进去板子后效果如下:
6. 小结
STM32 串口通讯在项目中使用的频率非常高,但由于不知道数据发送方会发送多少数据量,所以串口接收不定长数据成了一个急需解决的问题。
本文使用串口的空闲中断+DMA方法解决了此问题,并给出了详细的教程,希望对读者朋友有所帮助。
另外,想进大厂的同学,一定要好好学算法,这是面试必备的。这里准备了一份 BAT 大佬总结的 LeetCode 刷题宝典,很多人靠它们进了大厂。
刷题 | LeetCode算法刷题神器,看完 BAT 随你挑!
有收获?希望老铁们来个三连击,给更多的人看到这篇文章
推荐阅读:
- 程序员必备编程资料大全
- 程序员必备软件资源
欢迎关注我的博客:良许嵌入式教程网,满满都是干货!