准备3台虚拟机服务器(均可访问公网)
10.2.1.176 (作为操作机)
10.2.1.191
10.2.1.219
安装基础工具
yum install -y vim配置hosts
编辑/etc/hosts,添加
10.2.1.176 ceph-176
10.2.1.191 ceph-191
10.2.1.219 ceph-219配置免密登录(方便远程操作)
10.2.1.176 执行
[root@10-2-1-176 ~]# ssh-keygen
[root@10-2-1-176 ~]# ssh-copy-id ceph-191
[root@10-2-1-176 ~]# ssh-copy-id ceph-219同步hosts
[root@10-2-1-176 ~]# scp /etc/hosts ceph-191:/etc/
[root@10-2-1-176 ~]# scp /etc/hosts ceph-219:/etc/
配置ntp
内网服务端
[root@10-2-1-176 ~]# yum install -y ntp
[root@10-2-1-176 ~]# vim /etc/ntp.conf
[root@10-2-1-176 ~]# systemctl enable ntpd
Created symlink /etc/systemd/system/multi-user.target.wants/ntpd.service → /usr/lib/systemd/system/ntpd.service.
[root@10-2-1-176 ~]# systemctl restart ntpd
[root@10-2-1-176 ~]# systemctl status ntpd
● ntpd.service - Network Time Service
Loaded: loaded (/usr/lib/systemd/system/ntpd.service; enabled; vendor preset: disabled)
Active: active (running) since Mon 2023-12-04 15:15:40 CST; 8s ago
Process: 22311 ExecStart=/usr/sbin/ntpd -u ntp:ntp $OPTIONS (code=exited, status=0/SUCCESS)
Main PID: 22313 (ntpd)
Tasks: 2
Memory: 3.3M
CGroup: /system.slice/ntpd.service
└─22313 /usr/sbin/ntpd -u ntp:ntp -g
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: Listen and drop on 0 v6wildcard [::]:123
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: Listen and drop on 1 v4wildcard 0.0.0.0:123
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: Listen normally on 2 lo 127.0.0.1:123
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: Listen normally on 3 enp3s0 10.2.1.176:123
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: Listen normally on 4 lo [::1]:123
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: Listen normally on 5 enp3s0 [fe80::9372:4b38:76ef:92e4%2]:123
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: Listening on routing socket on fd #22 for interface updates
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: kernel reports TIME_ERROR: 0x2041: Clock Unsynchronized
Dec 04 15:15:40 10-2-1-176 ntpd[22313]: kernel reports TIME_ERROR: 0x2041: Clock Unsynchronized
Dec 04 15:15:40 10-2-1-176 systemd[1]: Started Network Time Service.
状态,目测正常

查看防火墙状态
[root@10-2-1-176 ~]# systemctl status firewalld
开放udp123端口
安装工具,查看端口状态
yum install net-tools
netstat -lnep | grep ntp

开放端口
[root@10-2-1-176 ~]# firewall-cmd --permanent --add-port 123/udp
success
[root@10-2-1-176 ~]# systemctl restart firewalld
[root@10-2-1-176 ~]# firewall-cmd --list-port
123/udp
内网客户端
安装ntp
[root@10-2-1-176 ~]# ssh ceph-191 yum install ntp -y
[root@10-2-1-176 ~]# ssh ceph-219 yum install ntp -y
测试内网时间服务器ip地址(成功)
[root@10-2-1-176 ~]# ssh ceph-191 ntpdate ceph-176
Authorized users only. All activities may be monitored and reported.
4 Dec 15:32:19 ntpdate[22293]: adjust time server 10.2.1.176 offset +0.007469 sec
[root@10-2-1-176 ~]# ssh ceph-219 ntpdate ceph-176
Authorized users only. All activities may be monitored and reported.
4 Dec 15:32:51 ntpdate[22327]: adjust time server 10.2.1.176 offset +0.009131 sec
主节点安装podman-3.4.4(编译rpm包)
参考官方适配的列表
COMPATIBILITY WITH PODMAN VERSIONS
Podman and Ceph have different end-of-life strategies. This means that care must be taken in finding a version of Podman that is compatible with Ceph.
This table shows which version pairs are expected to work or not work together:
| Ceph | Podman | |||||
|---|---|---|---|---|---|---|
| 1.9 | 2.0 | 2.1 | 2.2 | 3.0 | > 3.0 | |
| <= 15.2.5 | True | False | False | False | False | False |
| >= 15.2.6 | True | True | True | False | False | False |
| >= 16.2.1 | False | True | True | False | True | True |
| >= 17.2.0 | False | True | True | False | True | True |
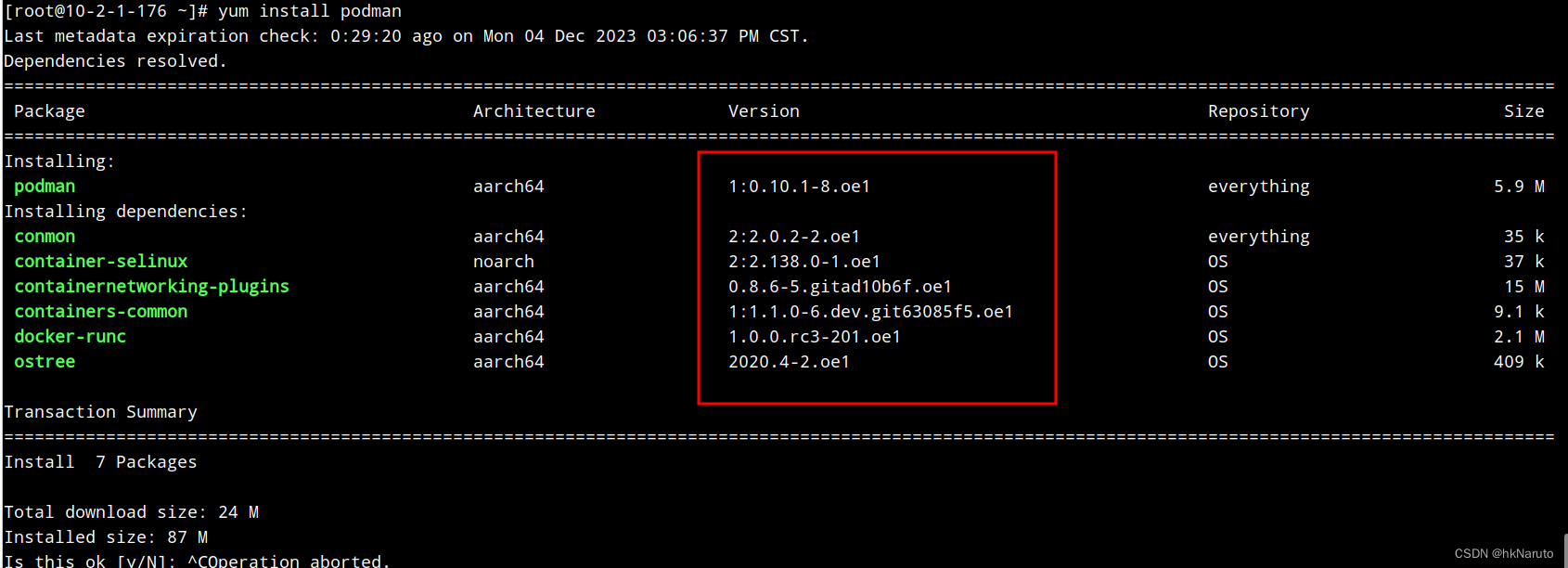
选择版本> 3.0
自带的版本不满足
下载src.rpm(openEuler-22.03-LTS-SP2)
wget https://repo.openeuler.org/openEuler-22.03-LTS-SP2/source/Packages/podman-3.4.4-1.oe2203sp2.src.rpm安装src.rpm
rpm -ivUh podman-3.4.4-1.oe2203sp2.src.rpm安装依赖
yum-builddep -y ~/rpmbuild/SPECS/podman.spec安装的依赖内容

构建rpm包
yum install rpm-build
rpmbuild -ba ~/rpmbuild/SPECS/podman.specpodman 3.4.4 rpm包

构建crun 1.4.5 rpm包(podman3.4.4依赖)
wget https://repo.openeuler.org/openEuler-22.03-LTS-SP2/source/Packages/crun-1.4.5-1.oe2203sp2.src.rpm
rpm -ivUh crun-1.4.5-1.oe2203sp2.src.rpm
yum-builddep -y ~/rpmbuild/SPECS/crun.spec
rpmbuild -ba ~/rpmbuild/SPECS/crun.speccrun 1.4.5 rpm包

构建conmon 2.1.0 rpm包(podman3.4.4依赖)
wget https://repo.openeuler.org/openEuler-22.03-LTS-SP2/source/Packages/conmon-2.1.0-1.oe2203sp2.src.rpm
rpm -ivUh conmon-2.1.0-1.oe2203sp2.src.rpm
yum-builddep -y rpmbuild/SPECS/conmon.spec
rpmbuild -ba rpmbuild/SPECS/conmon.speccommon 2.1.0 rpmb包

主节点安装podman
yum install -y rpmbuild/RPMS/noarch/podman-docker-3.4.4-1.noarch.rpm rpmbuild/RPMS/aarch64/podman-remote-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/crun-help-1.4.5-1.aarch64.rpm rpmbuild/RPMS/aarch64/crun-1.4.5-1.aarch64.rpm rpmbuild/RPMS/aarch64/conmon-2.1.0-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-help-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-gvproxy-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-plugins-3.4.4-1.aarch64.rpm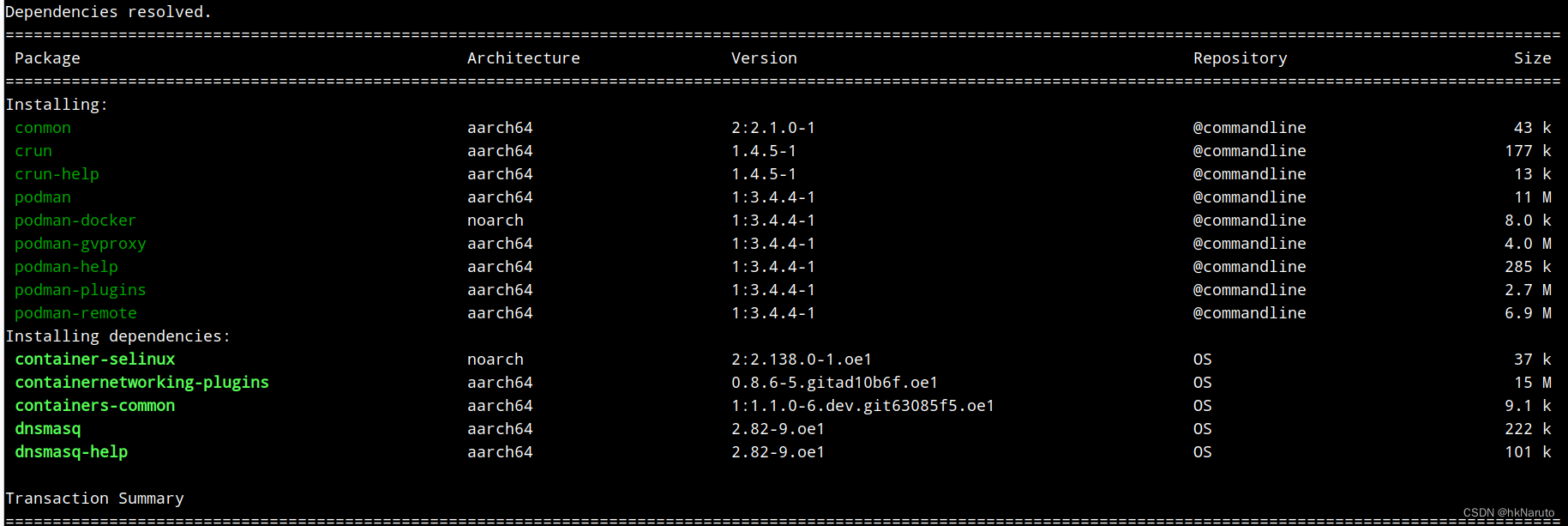
启动podman
[root@10-2-1-176 ~]# systemctl daemon-reload
[root@10-2-1-176 ~]# systemctl enable podman
[root@10-2-1-176 ~]# systemctl start podman
[root@10-2-1-176 ~]# systemctl status podman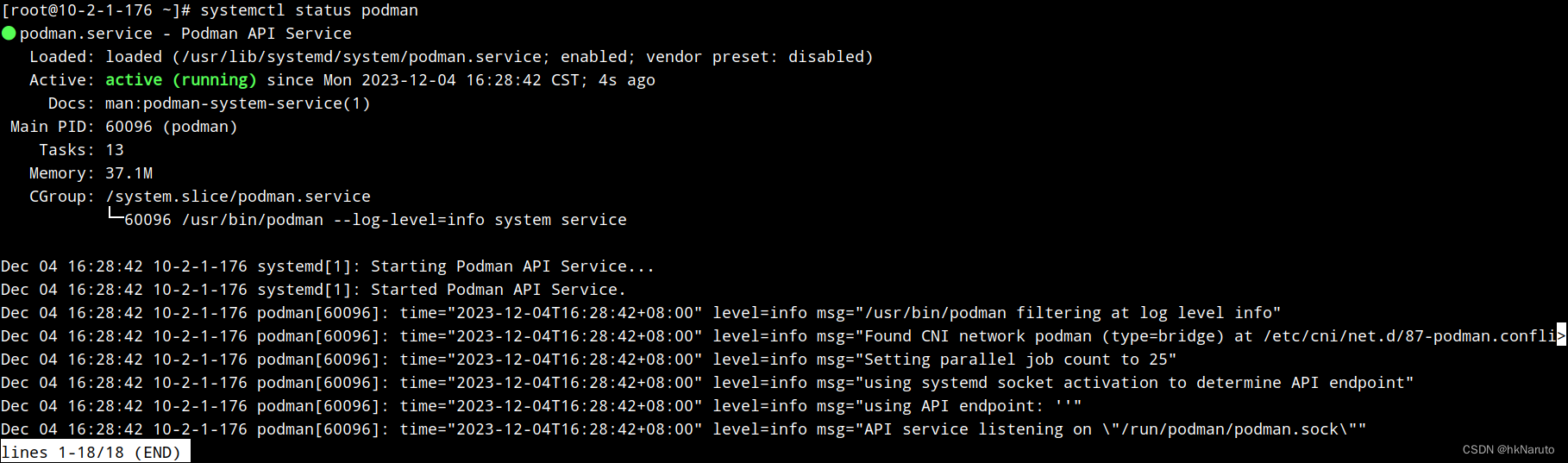
其他节点安装podman
同步rpm包
yum install -y rsync
ssh ceph-191 yum install -y rsync
ssh ceph-219 yum install -y rsync
rsync -avr -P ~/rpmbuild/RPMS ceph-191:~/rpmbuild/
rsync -avr -P ~/rpmbuild/RPMS ceph-219:~/rpmbuild/
安装podman 3.4.4
ssh ceph-191 yum install -y rpmbuild/RPMS/noarch/podman-docker-3.4.4-1.noarch.rpm rpmbuild/RPMS/aarch64/podman-remote-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/crun-help-1.4.5-1.aarch64.rpm rpmbuild/RPMS/aarch64/crun-1.4.5-1.aarch64.rpm rpmbuild/RPMS/aarch64/conmon-2.1.0-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-help-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-gvproxy-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-plugins-3.4.4-1.aarch64.rpm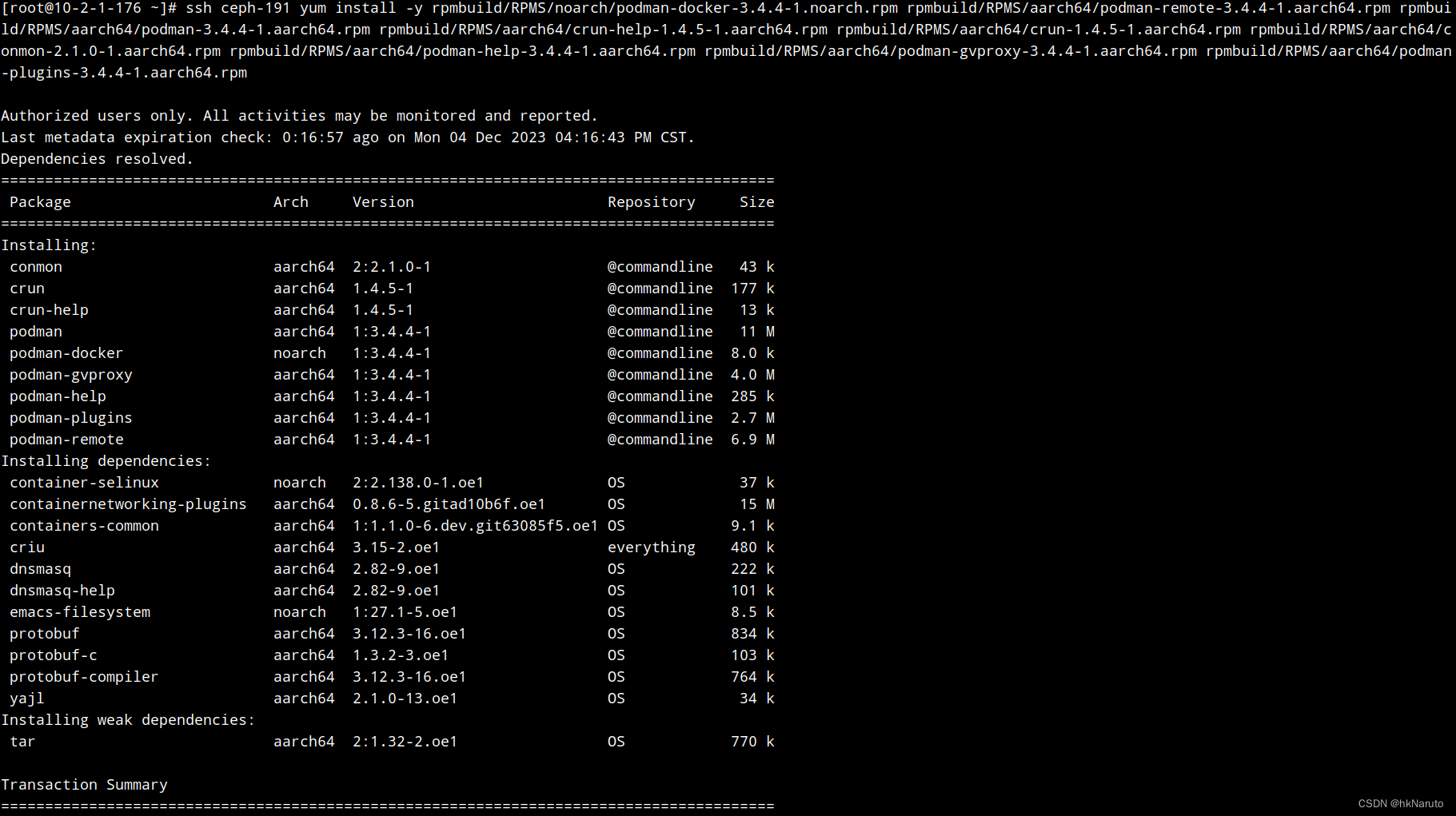
ssh ceph-219 yum install -y rpmbuild/RPMS/noarch/podman-docker-3.4.4-1.noarch.rpm rpmbuild/RPMS/aarch64/podman-remote-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/crun-help-1.4.5-1.aarch64.rpm rpmbuild/RPMS/aarch64/crun-1.4.5-1.aarch64.rpm rpmbuild/RPMS/aarch64/conmon-2.1.0-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-help-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-gvproxy-3.4.4-1.aarch64.rpm rpmbuild/RPMS/aarch64/podman-plugins-3.4.4-1.aarch64.rpm

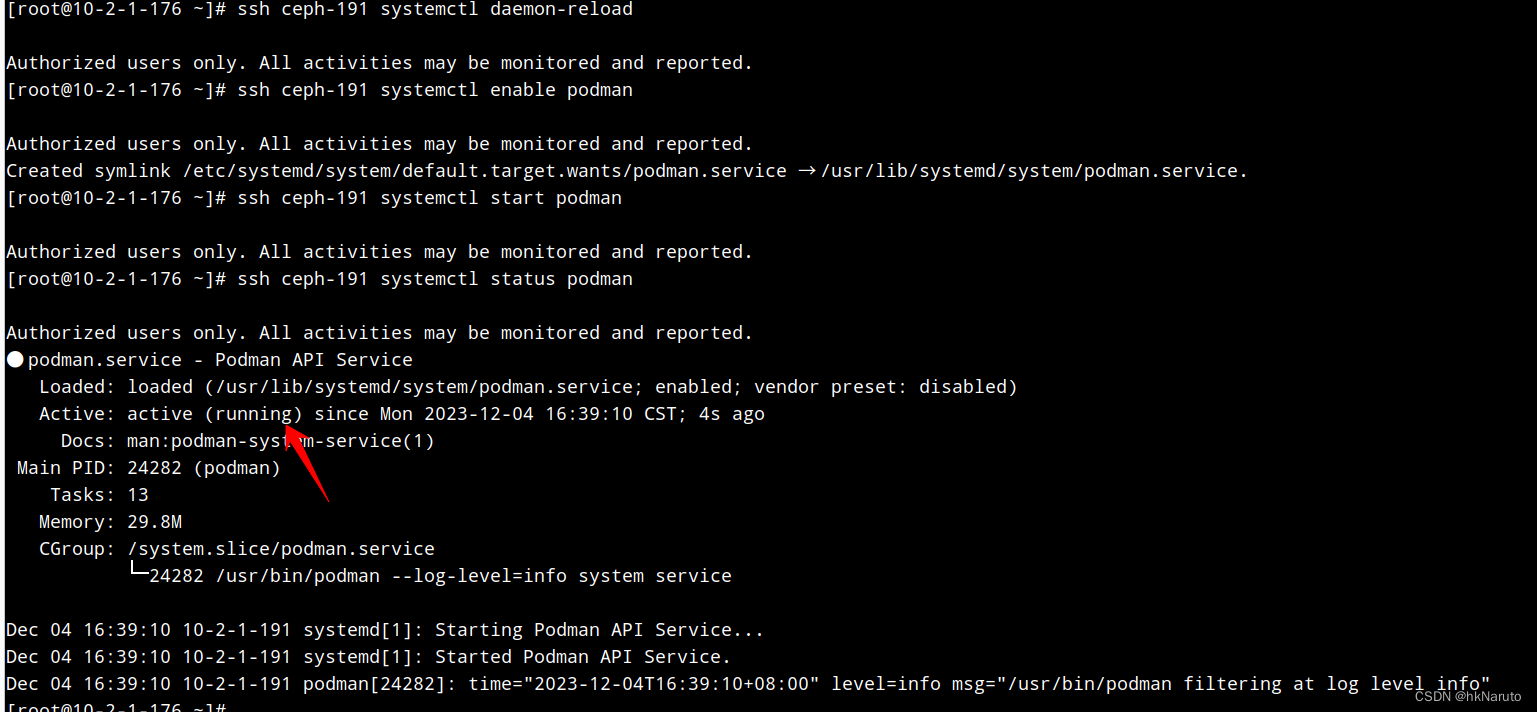
启动podman
ssh ceph-191 systemctl daemon-reload
ssh ceph-191 systemctl enable podman
ssh ceph-191 systemctl start podman
ssh ceph-191 systemctl status podman
ssh ceph-219 systemctl daemon-reload
ssh ceph-219 systemctl enable podman
ssh ceph-219 systemctl start podman
ssh ceph-219 systemctl status podman
至此,基础环境准备就绪。
接下来
搭建registry私服
拉取ceph镜像,导入私服
配置各节点insecury-registry
根据ceph镜像内部的cephadm拉取所有镜像,导入私服
利用私服boostrap主节点
配置全部采用私服镜像
添加、启动其他节点
添加mon
添加osd
。。。
参考
Compatibility and Stability — Ceph Documentation
openEuler 22.03 LTS x86_64 cephadm 部署ceph 16.2.14 未完成 笔记-CSDN博客