首先先定义一组多边形,这里的数据来自前后帧的检测结果
pre = [[[860.0, 374.0], [823.38, 435.23], [716.38, 371.23], [753.0, 310.0]],
[[829.0, 465.0], [826.22, 544.01], [684.0, 539.0], [686.78, 459.99]],
[[885.72, 574.95], [891.0, 648.0], [725.0, 660.0], [719.72, 586.95]],
[[1164.0, 406.0], [1101.05, 410.72], [1095.0, 330.0], [1157.95, 325.28]],
[[953.04, 102.78], [955.04, 138.78], [915.0, 141.0], [913.0, 105.0]],
[[1173.0, 524.0], [1104.0, 524.0], [1104.0, 437.0], [1173.0, 437.0]],
[[879.0, 297.0], [831.45, 340.49], [756.0, 258.0], [803.55, 214.51]],
[[1136.79, 226.81], [1176.33, 263.31], [1111.54, 333.5], [1072.0, 297.0]],
[[835.42, 225.76], [790.0, 251.0], [750.66, 180.19], [796.08, 154.95]],
[[887.0, 196.0], [839.04, 208.16], [821.0, 137.0], [868.96, 124.84]],
[[1033.0, 109.0], [1027.07, 142.01], [988.0, 135.0], [993.93, 101.99]],
[[1056.0, 83.0], [1093.09, 90.53], [1080.0, 155.0], [1042.91, 147.47]],
[[1064.01, 155.84], [1104.0, 158.0], [1099.99, 232.16], [1060.0, 230.0]],
[[1087.06, 118.88], [1124.0, 137.0], [1097.94, 190.12], [1061.0, 172.0]]]
post = [[[860.44, 373.25], [825.0, 434.0], [716.56, 370.75], [752.0, 310.0]],
[[829.0, 466.0], [825.64, 545.03], [684.64, 539.03], [688.0, 460.0]],
[[884.04, 575.0], [889.0, 649.0], [724.96, 660.0], [720.0, 586.0]],
[[1163.0, 406.0], [1100.0, 410.0], [1094.92, 329.94], [1157.92, 325.94]],
[[953.0, 103.0], [955.56, 137.96], [914.56, 140.96], [912.0, 106.0]],
[[1173.0, 524.0], [1104.0, 524.0], [1104.0, 438.0], [1173.0, 438.0]],
[[880.0, 297.0], [831.0, 342.0], [755.34, 259.61], [804.34, 214.61]],
[[1137.31, 226.66], [1177.0, 263.0], [1112.0, 334.0], [1072.31, 297.66]],
[[887.06, 194.23], [840.0, 207.0], [820.94, 136.77], [868.0, 124.0]],
[[836.69, 224.57], [792.69, 251.57], [750.0, 182.0], [794.0, 155.0]],
[[1033.0, 106.0], [1030.0, 143.0], [987.95, 139.59], [990.95, 102.59]],
[[1055.95, 83.27], [1094.0, 91.0], [1081.0, 155.0], [1042.95, 147.27]],
[[1064.0, 155.0], [1105.02, 156.05], [1103.02, 234.05], [1062.0, 233.0]],
[[1081.72, 120.74], [1120.0, 135.0], [1101.0, 186.0], [1062.72, 171.74]]]其中的每个列表元素代表一个多边形,列表中包含四个元素,分别代表多边形的顶点坐标
import numpy as np
import cv2
# 创建一个全白图像
image = np.ones((1080, 1920, 3), dtype=np.uint8) * 255
for i, poly in enumerate(pre):
polygon_list = np.array(poly, np.int32)
cv2.drawContours(image, contours=[polygon_list], contourIdx=-1, color=(0, 0, 255), thickness=2)
for i, poly in enumerate(post):
polygon_list = np.array(poly, np.int32)
cv2.drawContours(image, contours=[polygon_list], contourIdx=-1, color=(255, 0, 0), thickness=2)
cv2.imshow("Image", image)
cv2.waitKey(0)
cv2.destroyAllWindows()用opencv将这些坐标画出来:
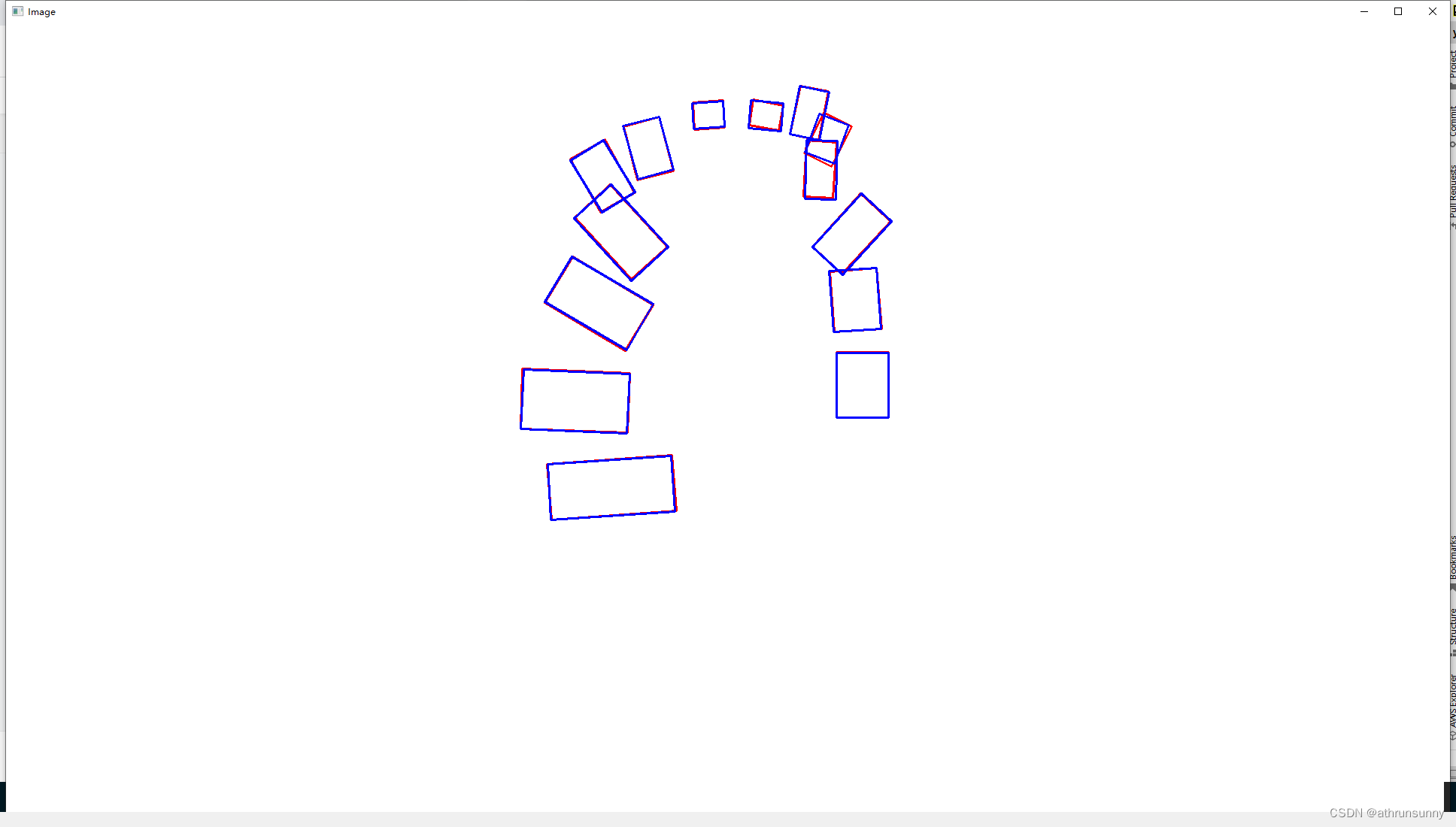
方法一
使用opencv内置函数计算iou
import math
def poly2rbox(polys):
"""
Trans poly format to rbox format.
"""
assert polys.shape[-1] == 8
rboxes = []
for poly in polys:
poly = np.float32(poly.reshape(4, 2))
(x, y), (w, h), angle = cv2.minAreaRect(poly) # θ ∈ [0, 90]
rboxes.append([x, y, w, h, angle])
return np.array(rboxes)
def bbox_overlaps(boxes, query_boxes):
""" Calculate IoU(intersection-over-union) and angle difference for each input boxes and query_boxes. """
if isinstance(boxes, list):
boxes = np.array(boxes)
if isinstance(query_boxes, list):
query_boxes = np.array(query_boxes)
N = boxes.shape[0]
K = query_boxes.shape[0]
boxes = np.round(boxes, decimals=2)
query_boxes = np.round(query_boxes, decimals=2)
overlaps = np.reshape(np.zeros((N, K)), (N, K))
delta_theta = np.reshape(np.zeros((N, K)), (N, K))
for k in range(K):
rect1 = ((query_boxes[k][0], query_boxes[k][1]),
(query_boxes[k][2], query_boxes[k][3]),
query_boxes[k][4])
for n in range(N):
rect2 = ((boxes[n][0], boxes[n][1]),
(boxes[n][2], boxes[n][3]),
boxes[n][4])
# can check official document of opencv for details
num_int, points = cv2.rotatedRectangleIntersection(rect1, rect2)
S1 = query_boxes[k][2] * query_boxes[k][3]
S2 = boxes[n][2] * boxes[n][3]
if num_int == 1 and len(points) > 2:
s = cv2.contourArea(cv2.convexHull(points, returnPoints=True))
overlaps[n][k] = s / (S1 + S2 - s)
elif num_int == 2:
overlaps[n][k] = min(S1, S2) / max(S1, S2)
delta_theta[n][k] = np.abs(query_boxes[k][4] - boxes[n][4])
return overlaps, delta_theta
pre = poly2rbox(np.array(pre).reshape(-1,8))
post = poly2rbox(np.array(post).reshape(-1,8))
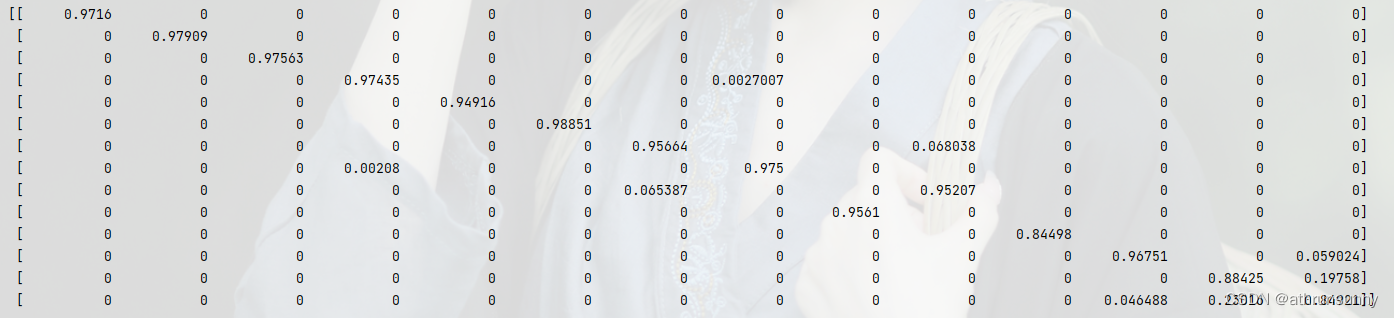
overlaps = bbox_overlaps(pre, post)[0]
print(overlaps)运行结果如下:
方法二
使用shapely
from shapely.geometry import Polygon
def calculate_iou(poly1, poly2):
# 计算两个多边形的交集面积
intersection_area = calculate_intersection(poly1, poly2)
# 计算两个多边形的并集面积
union_area = calculate_union(poly1, poly2)
# 计算IoU值
iou = intersection_area / union_area
return iou
def calculate_intersection(poly1, poly2):
# 计算多边形的交集面积
# 这里使用你选择的多边形交集计算方法,例如使用Shapely库的intersection()函数
intersection = poly1.intersection(poly2)
intersection_area = intersection.area
return intersection_area
def calculate_union(poly1, poly2):
# 计算多边形的并集面积
# 这里使用你选择的多边形并集计算方法,例如使用Shapely库的union()函数
union = poly1.union(poly2)
union_area = union.area
return union_area
def bbox_overlaps_shapely(boxes, query_boxes):
""" Calculate IoU(intersection-over-union) and angle difference for each input boxes and query_boxes. """
if isinstance(boxes, list):
boxes = np.array(boxes)
if isinstance(query_boxes, list):
query_boxes = np.array(query_boxes)
N = boxes.shape[0]
K = query_boxes.shape[0]
boxes = np.round(boxes, decimals=2)
query_boxes = np.round(query_boxes, decimals=2)
overlaps = np.reshape(np.zeros((N, K)), (N, K))
delta_theta = np.reshape(np.zeros((N, K)), (N, K))
for k in range(K):
q_box = Polygon(query_boxes[k].reshape(-1, 2).tolist())
for n in range(N):
d_box = Polygon(boxes[n].reshape(-1, 2).tolist())
overlaps[n][k] = calculate_iou(q_box, d_box)
return overlaps, delta_theta
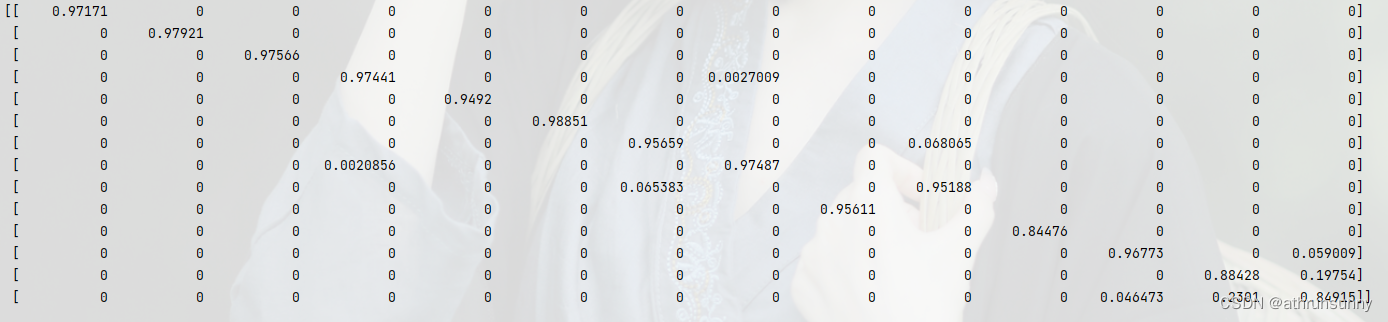
overlaps = bbox_overlaps_shapely(np.array(pre).reshape(-1,8),np.array(post).reshape(-1,8))[0]
print(overlaps)运行结果如下:
方法三
cuda内置的函数,需要编译环境,就不展开了