PyBullet 支持加载 URDF、SDF、MJCF 等多种机器人描述文件,并提供正/逆向运动学、正/逆向动力学、碰撞检测、射线相交查询等功能。

pip install pybullet安装后会在 Python 环境的 lib/site-packages 中出现以下文件夹:
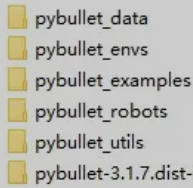
- pybullet_data:存放各种机器人的URDF文件和模型。
- pybullet_envs:存放各种机器人环境(类似gym)和示例效果。
- pybullet_examples:介绍pybullet的各种基本功能,如运动学、动力学、PD控制、碰撞检测等。
- pybullet_robots:演示几种典型的机器人,如 laikago、panda、xarm。
- pybullet_utils:提供一些实用工具,如读写urdf、数学函数、矩阵操作等。
- pybullet-3.1.7.dist-info:安装信息。
——————————————————————————————————————————
参考文献:
官方网站:
Bullet Real-Time Physics Simulation | Home of Bullet and PyBullet: physics simulation for games, visual effects, robotics and reinforcement learning.![]() https://pybullet.org/wordpress/
https://pybullet.org/wordpress/
官网学习文档:
Full featured documentation deployment platform - Read the Docs![]() https://about.readthedocs.com/?ref=readthedocs.com
https://about.readthedocs.com/?ref=readthedocs.com
PyBullet简介与机器人仿真入门 - 知乎PyBullet简介与安装PyBullet简介PyBullet 基于著名的开源物理引擎 bullet 开发,封装成了 Python 的一个模块,用于机器人仿真和学习。 PyBullet 支持加载 URDF、SDF、MJCF 等多种机器人描述文件,并提供正/逆向运…![]() https://zhuanlan.zhihu.com/p/477303099PyBullet仿真软件常用API函数 - 知乎软件安装pip install pybulletPyBullet的默认搜索路径:F:\Software_Setup\Python\Python_Setup\Lib\site-packages\pybullet_data Python的第三方库会安装到解释器目录的下的Lib的site-packages文件夹,里面有5个…
https://zhuanlan.zhihu.com/p/477303099PyBullet仿真软件常用API函数 - 知乎软件安装pip install pybulletPyBullet的默认搜索路径:F:\Software_Setup\Python\Python_Setup\Lib\site-packages\pybullet_data Python的第三方库会安装到解释器目录的下的Lib的site-packages文件夹,里面有5个…![]() https://zhuanlan.zhihu.com/p/590190456
https://zhuanlan.zhihu.com/p/590190456