说明
鱼眼镜头是一种视场角很大的镜头,但是得到的图片有很大的畸变,所以需要对鱼眼镜头进行标定,标定所得的参数可以对鱼眼镜头的图像进行矫正。
下图来自opencv的文档。其中c是鱼眼镜头原图,a和b是不同的矫正方法得到的图片。
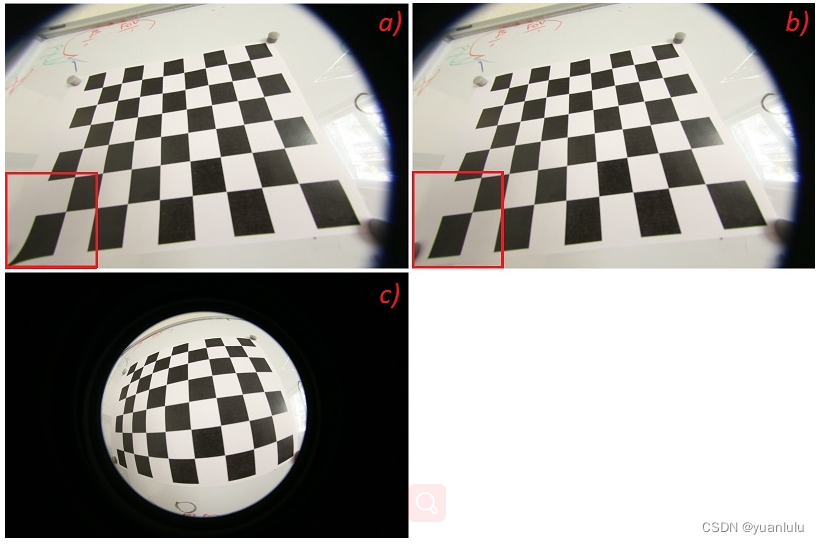
从OpenCV 3.0开始,OpenCV包含了cv2.fisheye包用来处理鱼眼镜头的矫正。
据《鱼眼相机成像模型》这篇文章所讲,opencv也只是实现了众多鱼眼镜头模型中的一种,是由Kannala提出的一种鱼眼相机的一般近似模型。
矫正步骤
关于使用opencv矫正鱼眼镜头的步骤和代码,github上很多,其中外网的一篇《Calibrate fisheye lens using OpenCV—part 1》很不错,但是貌似打不开了,我在一个国内的哥们的github项目上看到了pdf版,需要的自取:HLearning/fisheye
矫正鱼眼镜头分为2步:
- 标定镜头的2个内参。OpenCV中称作K(内参矩阵)和D(畸变系数)。
- 通过使用K和D矫正图片
为了得到k和d, 一般都是使用“张正友标定法”,也就是使用摄像头拍摄一批棋盘格的图片来计算K/D。学个矫正我还要买个镜头,打印棋盘格,还要拍照,好多人估计想到这就想放弃了。
别急,《sourishg/fisheye-stereo-calibration》这个gitgub项目里有拍好的图片,拿过来直接用就可以,
项目里有left和right俩镜头的图片,我只需要一个,选了left。注意这个项目是c++的,我只是用他的图片,代码来自别处。
镜头标定
我用的这个github的开源代码修改的:lengkujiaai/Calibrate-fisheye-lens-using-OpenCV
将代码保存为calibrate.py,和标定图片放在一个目录下执行,生成的K和D会打印到屏幕上。
我的代码如下:
import cv2
assert cv2.__version__[0] >= '3', 'The fisheye module requires opencv version >= 3.0.0'
import numpy as np
import os
import glob
CHECKERBOARD = (6,9)
subpix_criteria = (cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 0.1)
calibration_flags = cv2.fisheye.CALIB_RECOMPUTE_EXTRINSIC+cv2.fisheye.CALIB_CHECK_COND+cv2.fisheye.CALIB_FIX_SKEW
objp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
_img_shape = None
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = glob.glob('*.jpg')
imgcnt=0
for fname in images:
img = cv2.imread(fname)
if _img_shape == None:
_img_shape = img.shape[:2]
else:
assert _img_shape == img.shape[:2], "All images must share the same size."
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Find the chess board corners
imgcnt+=1
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, cv2.CALIB_CB_ADAPTIVE_THRESH+cv2.CALIB_CB_FAST_CHECK+cv2.CALIB_CB_NORMALIZE_IMAGE)
# If found, add object points, image points (after refining them)
if ret == True:
objpoints.append(objp)
cv2.cornerSubPix(gray,corners,(3,3),(-1,-1),subpix_criteria)
imgpoints.append(corners)
else:
print(fname, "findChessboardCorners failed")
N_OK = len(objpoints)
K = np.zeros((3, 3))
D = np.zeros((4, 1))
rvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]
tvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]
rms, _, _, _, _ = \
cv2.fisheye.calibrate(
objpoints,
imgpoints,
gray.shape[::-1],
K,
D,
rvecs,
tvecs,
calibration_flags,
(cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 1e-6)
)
print("imgcnt:", imgcnt)
print("Found " + str(N_OK) + " valid images for calibration")
print("DIM=" + str(_img_shape[::-1]))
print("K=np.array(" + str(K.tolist()) + ")")
print("D=np.array(" + str(D.tolist()) + ")")
这个代码需要修改的参数主要是"CHECKERBOARD = (6,9)"这里,需要根据棋盘格实际的角点数来。角点在哪呢?下面 是可视化后的结果,相信不难数。

上述代码执行输出:
imgcnt: 29
Found 29 valid images for calibration
DIM=(960, 600)
K=np.array([[227.37445013320539, 0.0, 471.44988103922896], [0.0, 226.54869118283946, 305.68361664835436], [0.0, 0.0, 1.0]])
D=np.array([[0.025348291552841663], [-0.025433974064838705], [0.022414488170602896], [-0.00804494586747774]])
其中K和D是我们下一步矫正需要的参数。
矫正图片
K和D是为了求解remap matrix,具体到之后的代码中就是map1和map2两个变量。他们满足“mapx[i, j]=m 和 mapy[i, j]=n”,表示 矫正后的第i行、第j列的像素值,等于原始图片的第n行、第m列的像素,其中m, n允许是非整数 。
# You should replace these 3 lines with the output in calibration step
import numpy as np
import cv2
import sys
import os
import glob
# DIM=(1280, 720)
# K=np.array([[-31190.47191209647, -0.0, 667.330647269763], [0.0, -14405.222579044883, 80.68167531658455], [0.0, 0.0, 1.0]])
# D=np.array([[152.50098302679038], [-150.36440309694163], [83.13957034501341], [-39.63732437907149]])
DIM=(960, 600)
K=np.array([[227.37445013320539, 0.0, 471.44988103922896], [0.0, 226.54869118283946, 305.68361664835436], [0.0, 0.0, 1.0]])
D=np.array([[0.025348291552841663], [-0.025433974064838705], [0.022414488170602896], [-0.00804494586747774]])
def undistort(img_path, out_path):
img = cv2.imread(img_path)
h,w = img.shape[:2]
map1, map2 = cv2.fisheye.initUndistortRectifyMap(K, D, np.eye(3), K, DIM, cv2.CV_16SC2)
undistorted_img = cv2.remap(img, map1, map2, interpolation=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT)
#cv2.imshow("undistorted", undistorted_img)
cv2.imwrite(out_path,undistorted_img)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
if __name__ == '__main__':
print("sys.argv[0]", sys.argv[0])
print("sys.argv[1]", sys.argv[1])
# print("sys.argv[1]", sys.argv[1])
print("sys.argv[1:]", sys.argv[1:])
# input_path=os.path(sys.argv[1])
# out_path=os.path(sys.argv[2])
glob_str=os.path.join(sys.argv[1], "*.jpg")
print("glob_str:", glob_str)
images=glob.glob(glob_str)
for img in images:
print("input", img)
out_img=os.path.join(sys.argv[2], os.path.basename(img))
print("out_img", out_img)
undistort(img, out_img)
矫正前后的的对比:
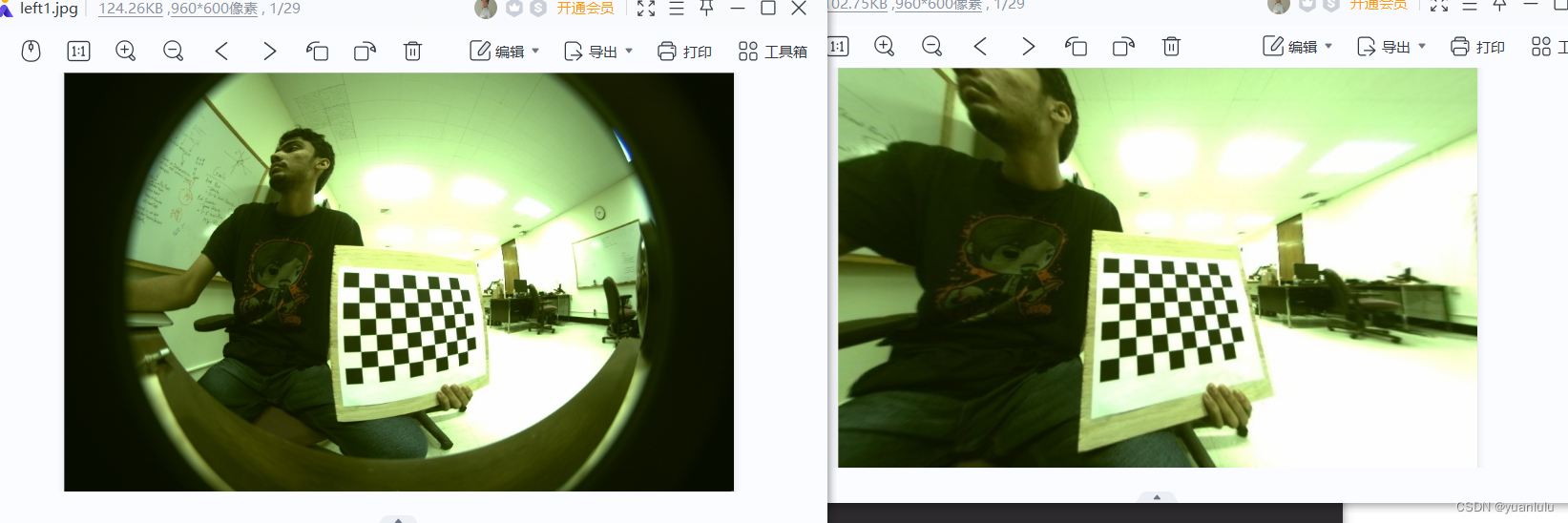
可以看到,矫正后的图片被裁剪了,只保留了中间的部分。这是因为越靠近边缘矫正后拉伸越明显,用过汽车360影像的应该都知道是啥意思。
《Calibrate fisheye lens using OpenCV—part 2》里保留全部图片的方法我没走通,我参考《关于C ++:OpenCV鱼眼校准会剪切太多的结果图像》这里的方法,可以得到一个完整的图像,但是效果感觉怪怪的:

参考资料
鱼眼相机成像模型
lengkujiaai/Calibrate-fisheye-lens-using-OpenCV
sourishg/fisheye-stereo-calibration
HLearning/fisheye
一文看透鱼眼相机的畸变矫正,以及目标检测应用
关于C ++:OpenCV鱼眼校准会剪切太多的结果图像