相关法规文件:
- FCW:
GB∕T 33577-2017 智能运输系统 车辆前向碰撞预警系统 性能要求和测试规程
一、前方碰撞预警 FCW( Forward Collision Warning)
参看:法规标准-GB/T 33577标准解读(2017版)
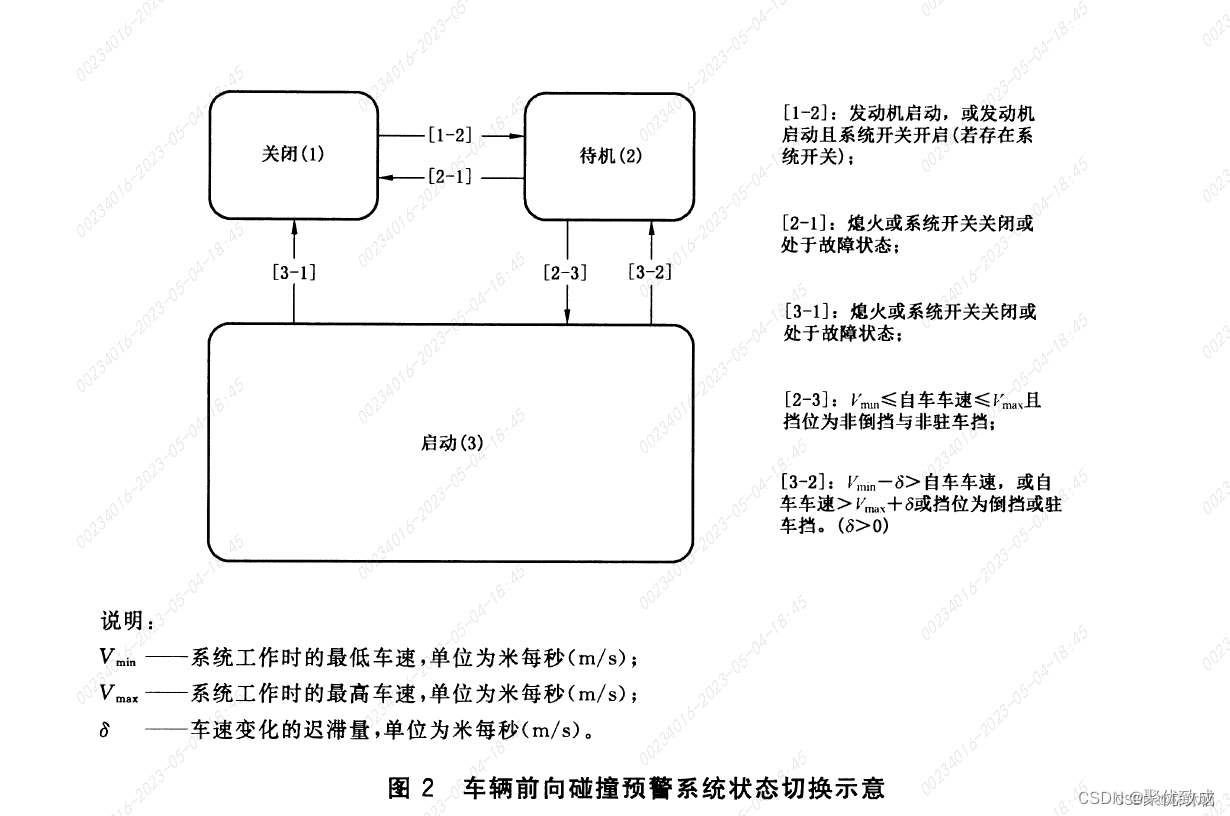
1、状态机
-
系统关闭
当车辆前向碰撞预警系统处于关闭状态,将不会进行报警。
在这个状态下,可以向驾驶员提供一个除了打开点火开关以外的启动系统的其他途径(如:设置一个系统开启/关闭的开关)。
当点火开关被置于关的挡位时,车辆前向碰撞预警系统切换至系统关闭状态。当系统故障检测单元检测到系统不能正常工作时,系统进入故障模式,系统被切换至关闭状态。 -
系统待机
当车辆前向碰撞预警系统处于待机状态,将不会进行报警。
在这个状态下,系统检测自车的车速及挡位状态。如果自车车速在系统工作的车速范围内,且挡位选在前进挡(除了倒档及驻车挡以外的其他挡位),系统将从待机状态切换到启动状态。当点火周期完成,发动机开始工作之后,或当发动机正在工作,驾驶员手动启动了系统开关,系统将从关闭状态切换到待机状态。当自车车速不在车辆前向碰撞预警系统的工作速度范围(考虑了车速变化的迟滞量δ)内,或驾驶员将挡位切换到倒档、驻车挡时,系统将从启动状态退出,进入待机状态。 -
系统启动
当车辆前向碰撞预警系统处于启动状态,如果报警条件满足,则系统将发出报警命令。只要车辆挡位处于任意前进挡,且车速在系统的工作范围以内,车辆前向碰撞预警系统将进入此状态。 -
工作限制条件
系统工作时的最低车速Vmin应不高于11.2m/s。系统工作时的最高车速Vmax应不低于27.8m/s或车辆能够达到的最高速度。相对车速的最小值应不高于4.2m/s,最大值应不低于20m/s。
即:
100.08km/h >=自车车速 >=40.32km/h
72km/h >=相对车速 >=15.12km/h
这里面有个名词 迟滞量(Hysteresis) 也叫滞回
参看:采用迟滞比较的简单比较法
2、预碰撞报警及碰撞报警
车辆前向碰撞预警系统可以提供两种不同报警内容:预碰撞报警 和 碰撞报警。
- 预备碰撞报警: 系统检测到潜在的碰撞风险,可能是因为车辆与前车的距离过近,或者前车突然减速。此时,系统会发出初步警告,提醒驾驶员减速或准备采取避免碰撞的措施。
- 碰撞报警: 当系统判断前方的碰撞即将发生或者风险极高时,会触发这个级别的警告。这通常意味着驾驶员需要立即采取紧急行动来避免碰撞,比如急刹车或紧急躲避。
3、要求减速度的阈值
车辆前向碰撞预警系统所涉及的要求减速度的阈值应满足如下要求:
- 若要求减速度αreq超过其阈值范围,车辆前向碰撞预警系统应发出碰撞报警;在干燥路面及温暖气候条件下,αreq阈值应不超过0.68g。
- 若车辆前向碰撞预警系统的报警时机可以由驾驶员进行调整,则至少其中应有一种设置能够满足以上一种关于要求减速度αreq的阈值要求
- 当要求减速度的阈值较低时,车辆前向碰撞预警系统可以发出预碰撞报警
- 碰撞报警及预碰撞报警的要求减速度的阈值可以根据道路条件、环境、驾驶员状态、驾驶员特性及不同的驾驶场景调整
4、响应时间
车辆前向碰撞预警系统涉及的响应时间的取值应满足如下要求:
- 在报警范围的计算中,应考虑驾驶员对报警的反应时间Tresp,该值不小于0.8s;
- 在要求减速度αreq的计算中,应考虑制动系统响应时间Tb,制动系统响应时间由系统设计者选择。
- 若自车驾驶员正在制动,驾驶员对报警的反应时间Tresp及制动系统响应时间Tb应被设置为0。
5、不报警条件
车辆前向碰撞预警系统应在如下条件下抑制或延迟报警:
- 若自车减速度大于等于要求减速度αreq的阈值,车辆前向碰撞预警系统不应发出任何报警。
- 在满足系统定义的曲率半径的道路上,车辆前向碰撞预警系统不应对不在自车车道内的前车发出任何报警。
- 若前车切入自车前方并车速高于自车,建议车辆前向碰撞预警系统不发出任何报警。
- 若自车驾驶员正在制动(俗称“刹车”),车辆前向碰撞预警系统可以一直或延迟报警。
- 若距离碰撞时间TTC大于4.0s,车辆前向碰撞预警系统可以抑制或延迟报警。
- 若自车正在进行换道或高动态的操纵行为,或者若自车驾驶员正在通过加大油门来抑制车辆的驾驶辅助系统主动施加的制动力,或者若自适应巡航系统正在施加最大的制动报警,车辆前向碰撞预警系统可以一直或延迟报警。
- 若驾驶工况不满足工作限制条件,车辆前向碰撞预警系统可以抑制或延迟报警。
6、报警距离计算
报警应由以下因素决定:
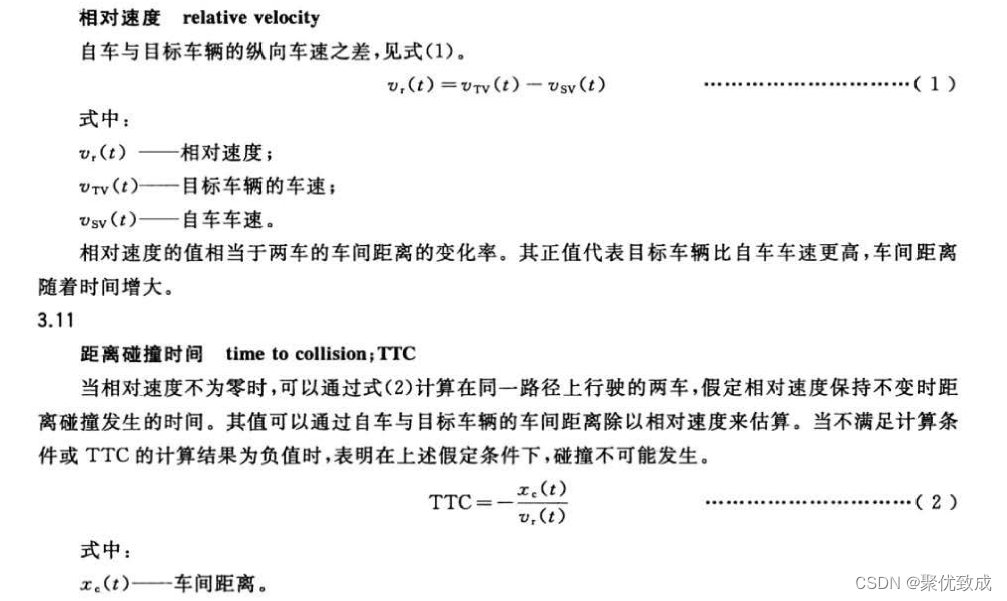
- 自车和障碍车辆之间的相对速度、
- 车间距离及自车车速、
- 驾驶员对报警的反应时间
- 自车与障碍车辆可能存在的制动减速度
碰撞报警计算:
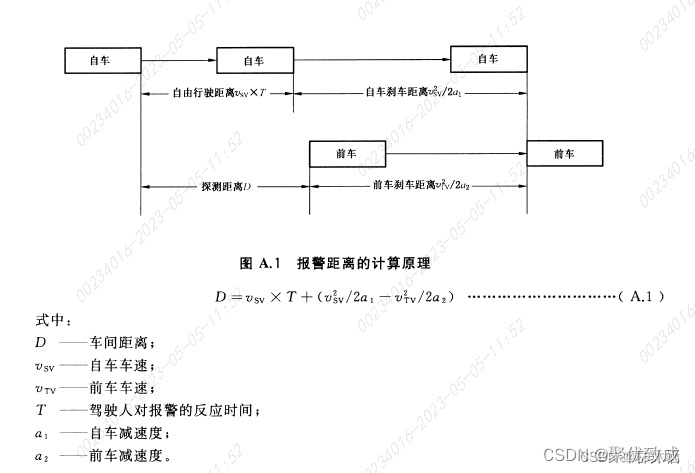
报警距离计算公式:
Distance=(T1+T2)* Vs +【 (Vs * Vs )/(2a1) - ( Vs + Vr )( Vs + Vr )
/(2 * a2)】+ safe distance 参数说明:
T1:驾驶员反应时间;T2:自车制动响应时间;Vs自车车速,Vr相对速度(相对速度代入公式需考虑符号);a1为自车减速度;a2为前车减速度;
T1、T2、safe distance等参数可标定;
T2 自车制动响应时间Tb(min)、Tb(max)由客户协助提供;
T1:驾驶员反应时间该值不小于0.8s;
Safe distance= 3 m (可标定)