使用到的符号:
agent 代理
reward 奖励
state(s) 状态
action(a) 行为
R reward 矩阵
Q 矩阵:表示从经验中学到的知识
episode:表示 初始→目标 一整个流程
贝尔曼方程(迭代公式):
Q
(
s
,
a
)
←
Q
(
s
,
a
)
+
α
[
R
(
s
,
a
)
+
γ
max
a
′
Q
(
s
′
,
a
′
)
−
Q
(
s
,
a
)
]
Q(s,a) \leftarrow Q(s,a) + \alpha [R(s,a) + \gamma \mathop {\max }\limits_{a'} Q(s',a') - Q(s,a)]
Q(s,a)←Q(s,a)+α[R(s,a)+γa′maxQ(s′,a′)−Q(s,a)]
当 α = 1 \alpha = 1 α=1 :
Q ( s , a ) ← R ( s , a ) + γ max a ′ Q ( s ′ , a ′ ) Q(s,a) \leftarrow R(s,a) + \gamma \mathop {\max }\limits_{a'} Q(s',a') Q(s,a)←R(s,a)+γa′maxQ(s′,a′)
其中, α \alpha α 是学习率, γ \gamma γ 是超参数, Q ( s ′ , a ′ ) Q(s',a') Q(s′,a′) 表示下一个状态和行为。
以一个简单迷宫为例:设 agent 在房子内任意一个房间(0-4),迷宫出口为 5,即走出迷宫的条件是到房子外。
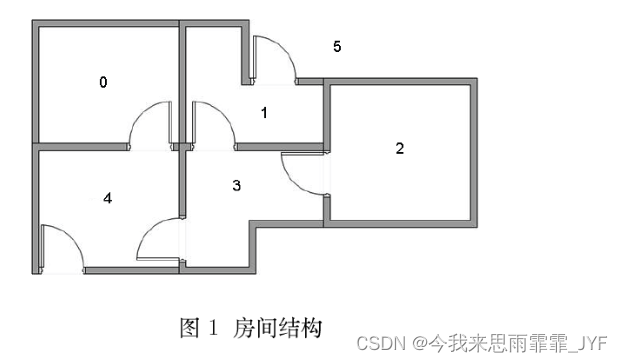
建模成 图(“状态”对应节点,“行为”对应边):
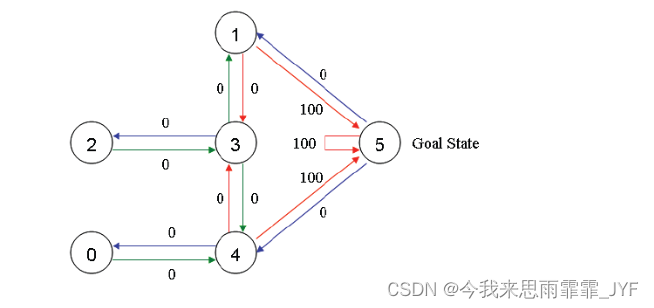
构建 R 矩阵(R 固定不变):
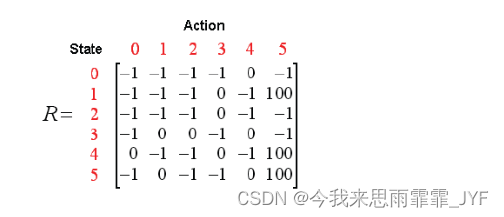
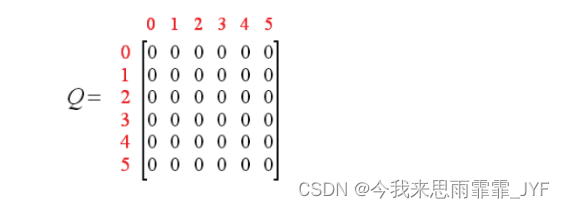
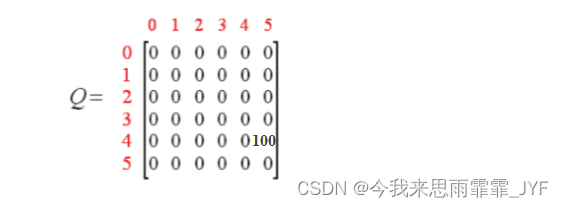
初始化 Q 为零矩阵,
γ
=
0.8
\gamma = 0.8
γ=0.8,以一个 episode 具体说明。
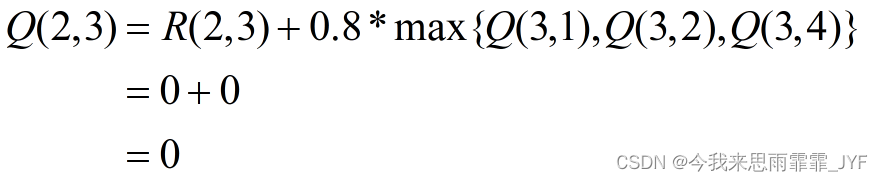
假设初始状态为 2。
① 当前状态 2 的下一步行为只能选 3,根据迭代公式,考虑下一个状态和行为,状态 3 可能的行为:1、2 或 4。
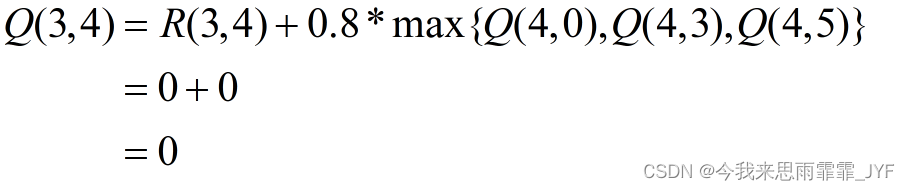
② 当前状态为 3,随机地,选取转至状态 4。下一个状态和行为:状态 4 可能的行为:0、3、5。
③ 当前状态为 4,随机地,选取转至状态 5。下一个状态和行为:状态 5 可能的行为:1、4、5。
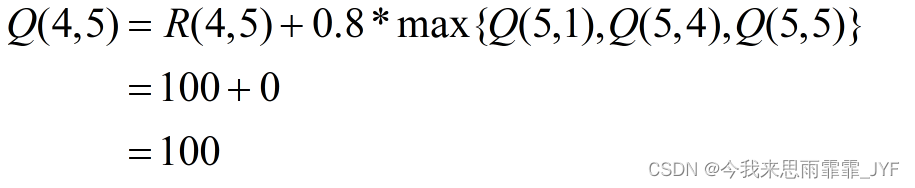
状态 5 为目标状态,故一次 episode 完成。
一次 episode 后的 Q 矩阵:
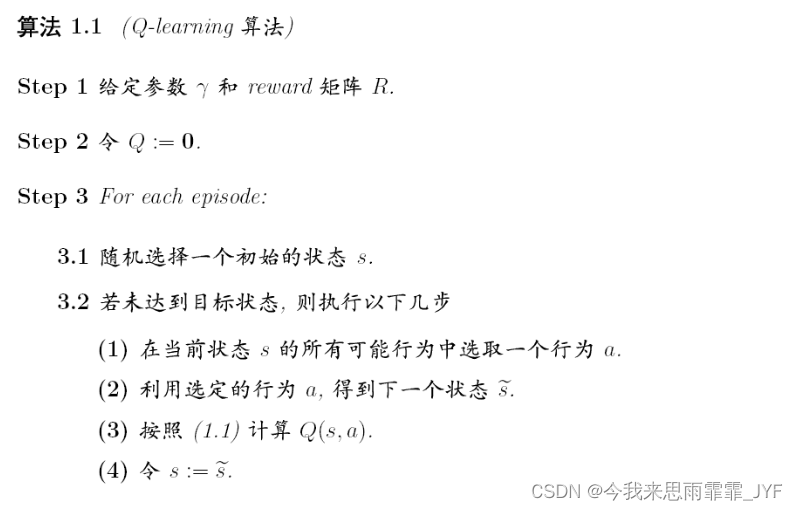
具体 Q-Learning 算法的计算步骤:
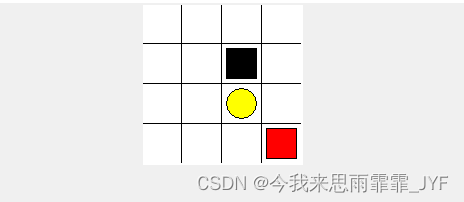
迷宫实例及代码:
红色方块是 agent ,黄色圆圈和黑色方块都是目标状态,其中,黄色圆圈的奖励为 1,黑色方块的奖励为 -1。该迷宫一共有 16 个状态,每个状态可能的行为:u(上),d(下),l(左),r(右)。
程序主循环
from Q_Learning.maze_env import Maze
from Q_Learning.RL_brain import DQN
import time
def run_maze():
print("====Game Start====")
step = 0
max_episode = 500
for episode in range(max_episode):
state = env.reset() # 重置智能体位置
step_every_episode = 0
epsilon = episode / max_episode # 动态变化随机值
while True:
if episode < 10:
time.sleep(0.001)
if episode > 480:
time.sleep(0.002)
env.render() # 显示新位置
action = model.choose_action(state, epsilon) # 根据状态选择行为
# 环境根据行为给出下一个状态,奖励,是否结束。
next_state, reward, terminal = env.step(action)
model.store_transition(state, action, reward, next_state) # 模型存储经历
# 控制学习起始时间(先积累记忆再学习)和控制学习的频率(积累多少步经验学习一次)
if step > 200 and step % 5 == 0:
model.learn()
# 进入下一步
state = next_state
if terminal:
print("episode=", episode, end=",")
print("step=", step_every_episode)
break
step += 1
step_every_episode += 1
# 游戏环境结束
print("====Game Over====")
env.destroy()
if __name__ == "__main__":
env = Maze() # 环境
model = DQN(
n_states=env.n_states,
n_actions=env.n_actions
) # 算法模型
run_maze()
env.mainloop()
model.plot_cost() # 误差曲线
环境模块 maze_env.py
import tkinter as tk
import sys
import numpy as np
UNIT = 40 # pixels
MAZE_H = 4 # grid height
MAZE_W = 4 # grid width
class Maze(tk.Tk, object):
def __init__(self):
print("<env init>")
super(Maze, self).__init__()
# 动作空间(定义智能体可选的行为),action=0-3
self.action_space = ['u', 'd', 'l', 'r']
# 使用变量
self.n_actions = len(self.action_space)
self.n_states = 2
# 配置信息
self.title('maze')
self.geometry("160x160")
# 初始化操作
self.__build_maze()
def render(self):
# time.sleep(0.1)
self.update()
def reset(self):
# 智能体回到初始位置
# time.sleep(0.1)
self.update()
self.canvas.delete(self.rect)
origin = np.array([20, 20])
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# return observation
return (np.array(self.canvas.coords(self.rect)[:2]) - np.array(self.canvas.coords(self.oval)[:2])) / (MAZE_H * UNIT)
def step(self, action):
# 智能体向前移动一步:返回next_state,reward,terminal
s = self.canvas.coords(self.rect)
base_action = np.array([0, 0])
if action == 0: # up
if s[1] > UNIT:
base_action[1] -= UNIT
elif action == 1: # down
if s[1] < (MAZE_H - 1) * UNIT:
base_action[1] += UNIT
elif action == 2: # right
if s[0] < (MAZE_W - 1) * UNIT:
base_action[0] += UNIT
elif action == 3: # left
if s[0] > UNIT:
base_action[0] -= UNIT
self.canvas.move(self.rect, base_action[0], base_action[1]) # move agent
next_coords = self.canvas.coords(self.rect) # next state
# reward function
if next_coords == self.canvas.coords(self.oval):
reward = 1
print("victory")
done = True
elif next_coords in [self.canvas.coords(self.hell1)]:
reward = -1
print("defeat")
done = True
else:
reward = 0
done = False
s_ = (np.array(next_coords[:2]) - np.array(self.canvas.coords(self.oval)[:2])) / (MAZE_H * UNIT)
return s_, reward, done
def __build_maze(self):
self.canvas = tk.Canvas(self, bg='white',
height=MAZE_H * UNIT,
width=MAZE_W * UNIT)
# create grids
for c in range(0, MAZE_W * UNIT, UNIT):
x0, y0, x1, y1 = c, 0, c, MAZE_H * UNIT
self.canvas.create_line(x0, y0, x1, y1)
for r in range(0, MAZE_H * UNIT, UNIT):
x0, y0, x1, y1 = 0, r, MAZE_W * UNIT, r
self.canvas.create_line(x0, y0, x1, y1)
origin = np.array([20, 20])
hell1_center = origin + np.array([UNIT * 2, UNIT])
self.hell1 = self.canvas.create_rectangle(
hell1_center[0] - 15, hell1_center[1] - 15,
hell1_center[0] + 15, hell1_center[1] + 15,
fill='black')
oval_center = origin + UNIT * 2
self.oval = self.canvas.create_oval(
oval_center[0] - 15, oval_center[1] - 15,
oval_center[0] + 15, oval_center[1] + 15,
fill='yellow')
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
self.canvas.pack()
DQN模型 RL_brain.py
import numpy as np
import torch
import torch.nn.functional as F
from torch import nn
import matplotlib.pyplot as plt
class Net(nn.Module):
def __init__(self, n_states, n_actions):
super(Net, self).__init__()
self.fc1 = nn.Linear(n_states, 10)
self.fc2 = nn.Linear(10, n_actions)
self.fc1.weight.data.normal_(0, 0.1)
self.fc2.weight.data.normal_(0, 0.1)
def forward(self, x):
x = self.fc1(x)
x = F.relu(x)
out = self.fc2(x)
return out
class DQN:
def __init__(self, n_states, n_actions):
print("<DQN init>")
# DQN有两个net:target net和eval net,具有选动作,存经历,学习三个基本功能
self.eval_net, self.target_net = Net(n_states, n_actions), Net(n_states, n_actions)
self.loss = nn.MSELoss()
self.optimizer = torch.optim.Adam(self.eval_net.parameters(), lr=0.01)
self.n_actions = n_actions
self.n_states = n_states
# 使用变量
self.learn_step_counter = 0 # target网络学习计数
self.memory_counter = 0 # 记忆计数
self.memory = np.zeros((2000, 2 * 2 + 2)) # 2*2(state和next_state,每个x,y坐标确定)+2(action和reward),存储2000个记忆体
self.cost = [] # 记录损失值
def choose_action(self, x, epsilon):
# print("<choose_action>")
x = torch.unsqueeze(torch.FloatTensor(x), 0) # (1,2)
if np.random.uniform() < epsilon:
action_value = self.eval_net.forward(x)
action = torch.max(action_value, 1)[1].data.numpy()[0]
else:
action = np.random.randint(0, self.n_actions)
# print("action=", action)
return action
def store_transition(self, state, action, reward, next_state):
# print("<store_transition>")
transition = np.hstack((state, [action, reward], next_state))
index = self.memory_counter % 200 # 满了就覆盖旧的
self.memory[index, :] = transition
self.memory_counter += 1
def learn(self):
# print("<learn>")
# target net 更新频率,用于预测,不会及时更新参数
if self.learn_step_counter % 100 == 0:
self.target_net.load_state_dict((self.eval_net.state_dict()))
self.learn_step_counter += 1
# 使用记忆库中批量数据
sample_index = np.random.choice(200, 16) # 2000个中随机抽取32个作为batch_size
memory = self.memory[sample_index, :] # 抽取的记忆单元,并逐个提取
state = torch.FloatTensor(memory[:, :2])
action = torch.LongTensor(memory[:, 2:3])
reward = torch.LongTensor(memory[:, 3:4])
next_state = torch.FloatTensor(memory[:, 4:6])
# 计算loss,q_eval:所采取动作的预测value,q_target:所采取动作的实际value
q_eval = self.eval_net(state).gather(1, action) # eval_net->(64,4)->按照action索引提取出q_value
q_next = self.target_net(next_state).detach()
# torch.max->[values=[],indices=[]] max(1)[0]->values=[]
q_target = reward + 0.9 * q_next.max(1)[0].unsqueeze(1) # label
loss = self.loss(q_eval, q_target)
self.cost.append(loss)
# 反向传播更新
self.optimizer.zero_grad() # 梯度重置
loss.backward() # 反向求导
self.optimizer.step() # 更新模型参数
def plot_cost(self):
plt.plot(np.arange(len(self.cost)), self.cost)
plt.xlabel("step")
plt.ylabel("cost")
plt.show()
代码存在的一点缺陷:存在个别 episode 需要经过大量状态才能找到目标状态(主要表现在程序在两个状态间来回跳动:7→8→7→8→7→8…,需要很长时间才能跳出这个局限)
致谢:https://blog.csdn.net/itplus/article/details/9361915
https://www.cnblogs.com/nrocky/p/14496252.html