摘要:
AWR294x收发器是一种集成的片上雷达设备,不仅具有RF,模拟和ADC电路,而且在芯片上还有许多处理器核。它有一个专门的雷达信号处理加速器(称为硬件加速器或HWA),具有能够探测和减缓雷达-雷达干扰的特点。本文档介绍了最常见的干扰类型(称为交叉干扰)的机制,并展示了如何配置德州仪器HWA来在线检测和修复这种干扰。
交叉干扰通常会导致底噪的增加,从而导致漏检。
1.简介
最常见的FMCW雷达到FMCW雷达的干扰发生在来自雷达(称为干扰源)的发射chirp穿过另一个雷达接收器(称为受害者)的chirp时。在这种情况下,术语交叉是指两个设备的瞬时射频频率在某一时刻相等。在这种情况下,干扰源的信号将不会被受害者接收机上的任何滤波器抑制。干扰源的chirp将被下变频、数字化并作为ADC数据的一部分发送出去。
在ADC数据中,交叉发生的持续时间会有小故障,其幅度与干扰源和受害者之间的距离以及干扰源和受害者的天线增益有关。如果不加以缓解,这种故障在距离和多普勒处理后会导致不可接受的高底噪,因此识别故障区域(称为定位处理)和“修复”损坏(称为缓解)都是保持信噪比和保持稳健性能所必需的重要信号处理步骤。
AWR294x收发器是TI最新的雷达单芯片,除了C66x DSP(用于专有信号处理)和R5F ARM处理器(跟踪,通信和控制等)外,还有雷达信号处理硬件加速器(称为HWA)。HWA配备了硬件块,可以在距离处理期间在线定位和减轻干扰。
本文讨论了两个主题,交叉干扰的机制和方法检测和使用HWA减轻这种干扰。对FMCW雷达干扰的更深入的介绍可以在[1]中看到。
2.交叉干扰
只有当被害者雷达和干扰源雷达具有不同斜率的chirp设计时,才会发生交叉干扰。在这种情况下,两种chirp可以相互交叉。当交叉发生时,受害者将观察到短暂的干扰事件。干扰源发送的chirp与受害者的chirp混合并向下转换。干扰源的能量只有在频率差落入受害者的中频带宽时才能被受害者观察到。如果频率差较大,则大部分能量将被模拟和数字滤波器滤除。由于在室外遇到的大多数FMCW雷达都会有不同的斜率和chirp重复率,交叉干扰是FMCW雷达最可能面临的干扰。
如图2-1所示。当干扰源的chirp穿过受害者的传输chirp(最上面的图)时,干扰源chirp的能量被观察为快速移动通过中频带宽的chirp(第二图)。在时域中,受干扰影响的区域类似于一个小故障(第三张图)。
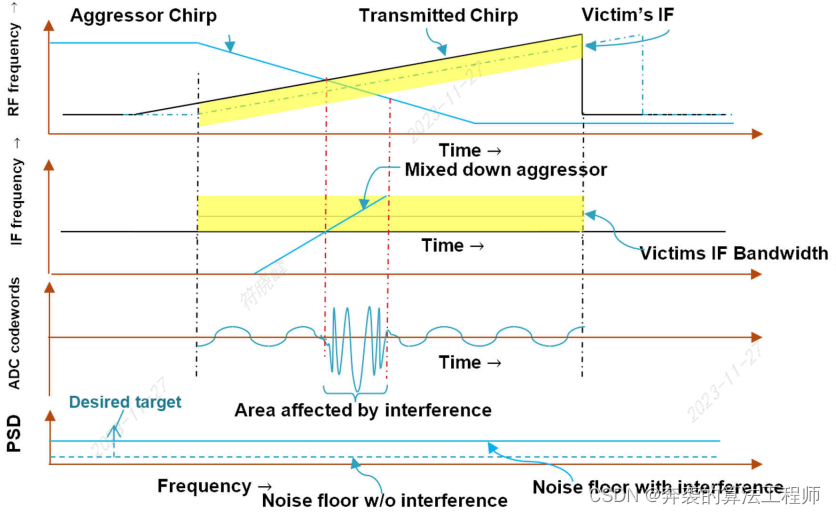
图2-1 交叉干扰在时域信号引起故障
最后,在对ADC样本进行傅里叶变换后,在频域,这些交叉干扰通常会增加底噪,降低强目标的信噪比,掩埋弱目标,从而影响检测并产生瞬时盲点。故障持续时间(τGlitch)由受害者的中频带宽以及受害者(slopevictim)和干扰源(slopeaggressor)的斜率决定。如式1所示:
 (1)
(1)
请注意,故障持续时间通常很短。例如,如果中频带宽为12 MHz,斜率差为40 MHz/μs,则大约0.3 μs,即最终ADC输出的4个采样将受到干扰。
2.1交叉干扰的性能分析
干扰水平将取决于雷达之间的距离(R),连接干扰源Tx和受害者Rx的线路中的天线增益(AggtxAntGaindB + VicrxAntGaindB),chirp“交叉”的持续时间和干扰源发射功率(PAggtx)。
这种干扰的主要影响是提高了底噪。距离处理后的底噪增量可计算为:
![]() (2)
(2)
其中![]() 为受干扰影响的ADC样本数与ADC样本总数之比。Pnoise是不受任何干扰的底噪,由下式给出,其中NF为受害接收机的噪声系数,BandWidthIF为中频带宽。
为受干扰影响的ADC样本数与ADC样本总数之比。Pnoise是不受任何干扰的底噪,由下式给出,其中NF为受害接收机的噪声系数,BandWidthIF为中频带宽。
![]() (3)
(3)
PInterference是受害者接收到的干扰功率由下式给出:
![]() (4)
(4)
这里λ对应于波长。
以下面参数为例:
•干扰源功率(dBm), PAggtx = 10 dBm
•干扰源天线增益,AggtxAntGaindB = 10 dB
•受害者天线增益,VicrxAntGaindB = 10 dB
•受害者噪声系数,NF = 14 dB
•IF带宽,BandWidthIF = 10MHz
•波长,λ = 3.9mm
•干扰源和受害者之间的距离= 10m
•受影响的样本数量= 10%
然后,
•干扰功率,PInterference = -60 dBm
•热噪声功率,Pnoise = -90 dBm
•增加底噪,NoiseIncIndB = 20 dB
如果底噪增加20 dB,则会导致漏检,除非故障被定位并移除。
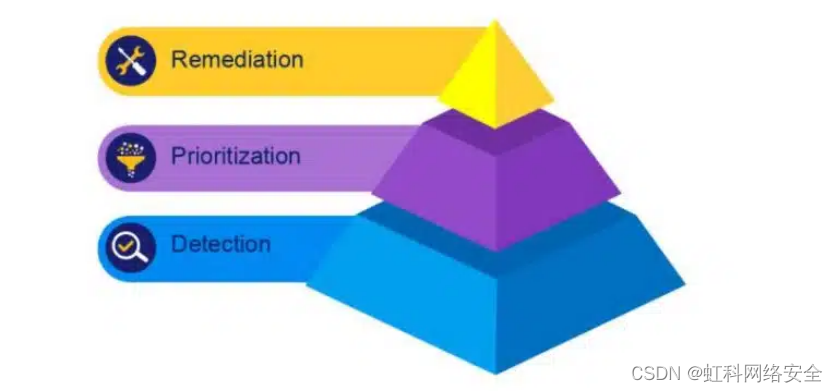
3.在HWA定位和缓解(干扰)
在此基础上,讨论了在AWR294x等设备上用于定位和缓解干扰的方法。定位定义为在ADC数据中发现干扰区域的过程,缓解定义为修复受损区域的过程。
雷达硬件加速器[2](或HWA)是用于常见雷达信号处理选项的加速器的集合。这些加速器分为四个不同的核心(图3-1):FFT、CFAR、压缩/解压缩和定位最大(干扰)。干扰模块是FFT引擎的一部分,放在FFT引擎之前。这是为了在FFT之前并与FFT一起执行干扰缓解过程。所有的模块都是流引擎-每个周期他们接收一个样本作为输入,并给出一个样本作为输出。因此,减少干扰的额外成本只是增加几个周期。
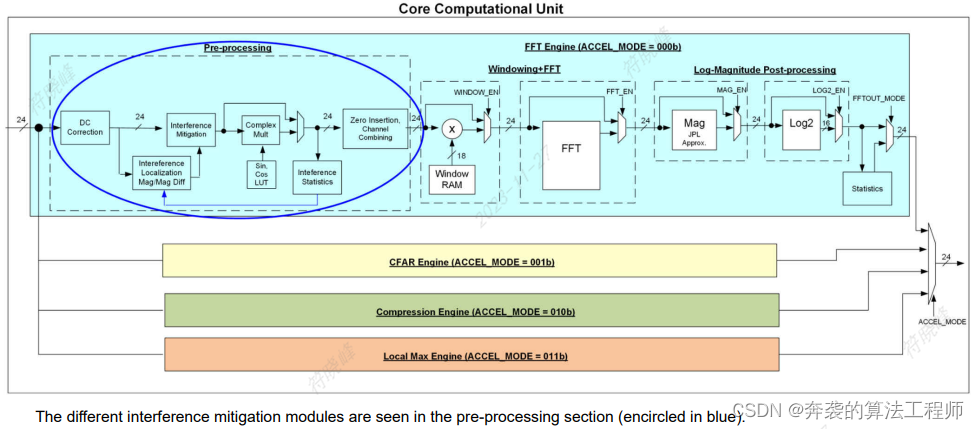
图3-1 HWA中不同的加速器
与干扰相关的模块有:
•干扰统计模块-计算ADC的统计数据并生成阈值。
•干扰定位模块-使用阈值找到异常值。
•干扰缓解模块-使用三种方法之一去除异常值。
消除干扰的过程分为两步,如图3-2所示:
1.在第一次传递中,在ADC上计算统计数据。干扰定位与抑制是一种双通道方法。
2.在第二步中,统计数据用于生成阈值。然后,在干扰定位模块中,越过阈值的样本被标记为损坏/干扰。然后将此信息提供给干扰缓解模块。
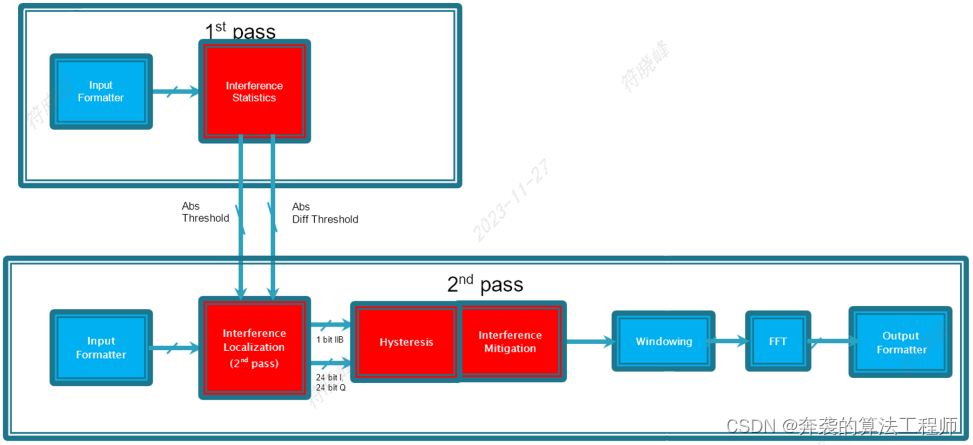
图3-2 干扰缓解流
3.1干扰统计
在ADC数据上计算两种统计[2]。这些是:
•ADC数据绝对值的和,![]() 这里xi对应于chirp的ADC样本。
这里xi对应于chirp的ADC样本。
•ADC数据的一阶差分之和,![]()
然后将它们按比例缩小以生成均值,然后按比例扩大以生成两个阈值(AbsThreshold和AbsDiffThreshold)。
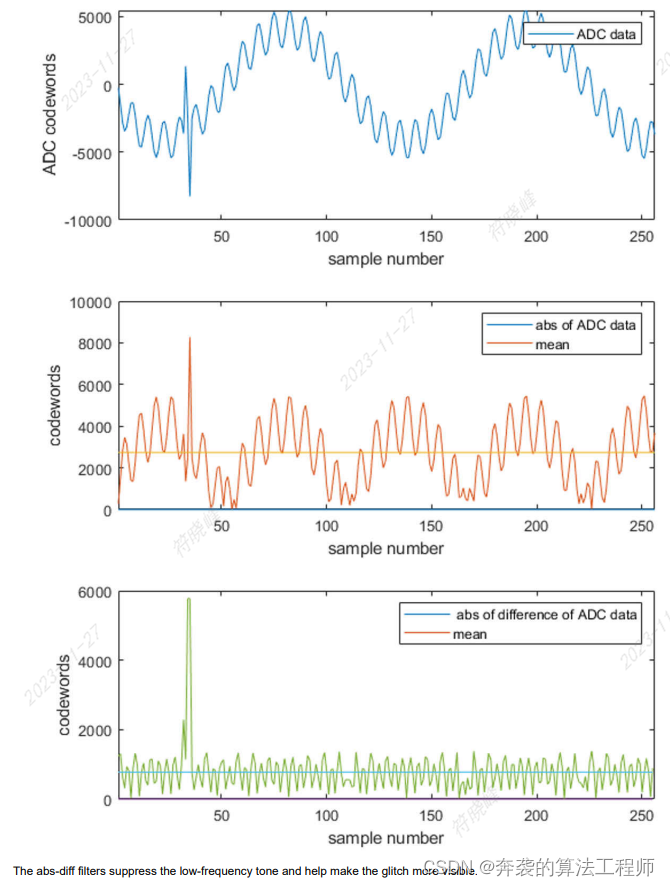
图3-3 使用绝对值和绝对值-差分滤波器检测异常值
计算一阶差分的优点是它抑制了低频反射,如缓冲器反射或天线耦合效应,从而可以很容易地发现较弱的故障。
3.2定位模块
定位是通过寻找ADC数据中的异常值来实现的[2]。使用从干扰统计中设置的阈值,可以发现这些异常值。在能量上超过该阈值的样本可以标记为受到干扰的影响。注意,可以使用' absThreshold '和/或' absDiffThreshold '来检测异常值。
在2944中,每个样本都标有一个干扰指示位(或IIB),低于阈值则为零,高于阈值则为1。然后可以将该序列提供给迟滞模块,该模块可选地提供迟滞。最后,这个IIB比特流被发送到缓解模块,在那里它被用来识别干扰位置。
3.3(干扰)缓解
HWA 2.0中提供了许多缓解方法[2]。最简单的缓解方法是用零替换干扰区域(图3-4 -顶部)。然而,这样做的副作用是产生了很大的副瓣,可能会掩盖弱目标。一个更好的方法是用一个窗口来清空。平滑窗口用于将受干扰影响的样本归零。这使得旁瓣较低,对弱目标的可探测性更好(图3-4 -中间)。
一种更好的方法是在空白区域执行线性插值,使用干扰前的最后一个良好ADC样本和干扰期后的第一个良好ADC样本。由于最强的反射器可能离雷达更近,因此频率更低,这种方法在许多情况下都很有效(图3-4 -底部)。
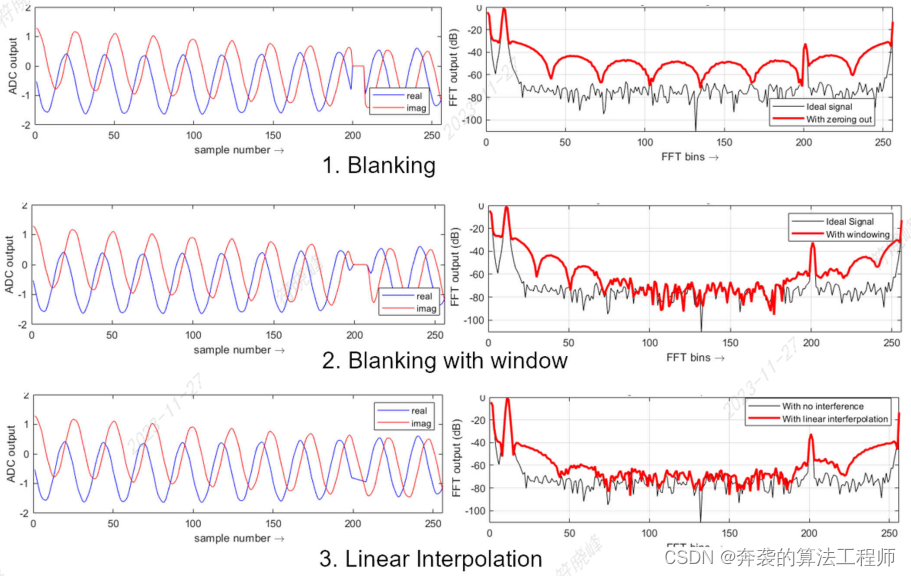
图3-4 不同缓解方法
(干扰)缓解是一个活跃的研究领域,比我们讨论的三种更复杂的缓解方案是可能的。然而,随着缓解计划变得更加复杂,人们必须权衡消耗的MIPs数量与更复杂的计划所获得的效益。
4.总结
交叉干扰会导致检测失败,因为处理后的信号底噪会有不可接受的增加。在ADC数据中,这些干扰事件看起来像小故障。定位和减轻这些故障对于保持雷达的强大性能至关重要。
AWR294x收发器具有多种工具来查找和定位干扰,包括雷达信号处理中的专用模块,可以在线消除这些干扰。
5.参考资料
1. Sriram Murali, Karthik Subburaj, Brian Ginsburg and Karthik Ramasubramanian, “Interference Detection in FMCW Radar Using A Complex Baseband Oversampled Receiver”
2. Texas Instruments: AWR294x Technical Reference Manual v0.7 Technical Reference Manual