本文参考《摄影测量学》 (王佩军,徐亚明 编著);
01 不同阶段的摄影测量的对比,课本表1-1

(原始资料、投影方式、仪器记不住,那名字总该记住吧?模拟摄影测量、解析摄影测量、数字摄影测量)
02 量测型摄像机的特点(或者换种问法?量测摄像机与普通摄像机的区别你总该会回答吧)
1. 量测摄像机的焦距是已知的,且等于摄影机的主距;
2. 量测摄像机拍摄的照片具有框标标志;
3. 量测摄像机的内方位元素是已知的。
03 摄影测量影像获取方式,同时也要知晓航空摄影测量及其特点
对于航空影像的获取主要使用专用的量测航空摄影机;而对于航天影像的获取是通过各种遥感影像卫星;获取近景影像的获取采用各种量测及非量测相机。
另外,对于航空摄影测量主要选用量测摄影机,其特点如题2
航向方向相邻两个摄影站间的空间距离称为摄影基线(加一个知识点)
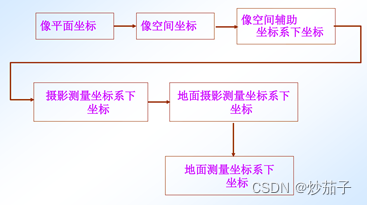
04 摄影测量坐标系的种类和转换过程
- 摄影测量的坐标系分为两类,一类是像方坐标系,一类是物方坐标系。
- 像方坐标系主要分为像平面坐标系、像空间直角坐标系、像空间辅助直角坐标系。
- 物方坐标系分为地面测量坐标系、地面摄影测量坐标系、摄影测量坐标系。
- 转换过程:由于像平面坐标系是二维坐标系,因此将像平面坐标系转化为像空间直角坐标系;由于各个像片的像空间直角坐标系不统一,因此将建立像空间辅助直角坐标系将所有的像空间直角坐标系全部转化为统一的坐标系;接着将像空间辅助坐标系转化为摄影测量坐标系,再转化为地面摄影测量坐标系,最后转化为地面测量坐标系。
- 总而言之,上述都是废话:将像平面坐标系转化为像空间直角坐标系,接着将其转化为像空间辅助直角坐标系,然后转化为摄影测量坐标系,再转化为地面摄影测量坐标系,最后转化为地面测量坐标系。
05 摄影测量的基本任务是什么
摄影测量的任务是从像片获取地面目标的真实坐标。
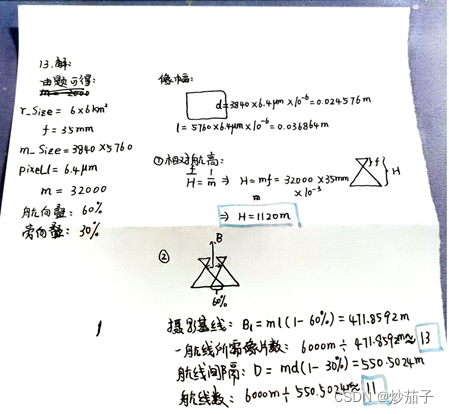
06 比例尺和航高是如何计算的,请大家留意课后题
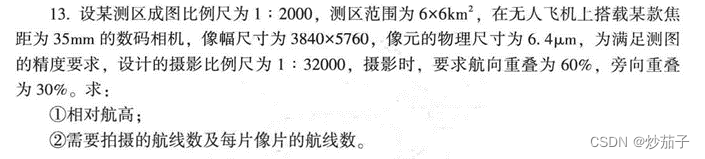
(下面的d和l代反了应该,应该以长边为航线垂直方向)
07 摄影测量成果检查的规范要求,如航高变化要求、航向重叠度、旁向重叠度、像片倾角等
像片的色调要好,航高的变化量应该不大于5%,航向重叠要大于60%,旁向重叠要大于30%,像片倾角(摄影机主轴与铅锤方向的夹角)要小于2°,航向弯曲(最大偏距与航线总长的比)不超过3%,像片旋角(相邻像片的主点连线与像幅沿航线方向两标框连线间的夹角)小于6°。
08 共线条件方程是什么,12个参数的含义。
- 共线条件方程是表达摄影中心、像点、地面点三点位于一条直线的数学关系式。
- 共线方程式中包括12个数据:像点在以像主点为原点的像平面坐标系中的坐标x,y,像点对应的地面点在地面摄影测量坐标系中的坐标X,Y,Z,像片主距f,及像片的外方位元素Xs,Ys,Zs(确定位置的参数),w、y、k(确定姿态的参数:航向倾角、旁向倾角、像片旋角)。
09 立体摄影测量的基础是什么,人造立体视觉的必要条件是什么
- 立体摄影测量的基础是人造立体视觉原理。
- 人造立体视觉的必要条件是:
-
-
- 立体像对:两张像片必须是在两个不同位置对同一景物拍摄的立体像对;
- 分像条件:每只眼睛必须只能观察像对的一张像片;
- 两张像片上相同景物(同名像点)的连线与眼基线应大致平行;
- 两像片的比例尺应相近。
-
-
10 左右、上下视差概念,内外方位元素、相对定向、绝对定向定义和参数个数
- 左右视差:立体像对中左右像片的同名像点在各自的像平面坐标系中的x坐标之差;
- 上下视差:立体像对中左右像片的同名像点在各自的像平面坐标系中的y坐标之差,即q = y1-y2。
- 内方位元素表示摄影中心与像片之间的位置关系的参数,内方位元素有3个参数,分别包括像主点的X、Y坐标,摄影机的主距。
- 外方位元素表示摄影中心S和像片二者与地面坐标系之间的位置关系和姿态关系的参数,外方位元素共有6个参数,分别为φ、ω、κ、Xs、Ys、Zs。
- 相对定向:指重建与实地相似的立体几何模型的过程,相对定向有5个元素。
- 绝对定向:指借助已知的地面控制点,把经过了相对定向的立体几何模型进行平移、旋转、缩放,将其纳入到地面摄影测量坐标系的过程。绝对定向有7个元素,为:Xs、Ys、Zs(位置参数)、λ(比例系数)、Φ、Ω、Κ(姿态参数)。
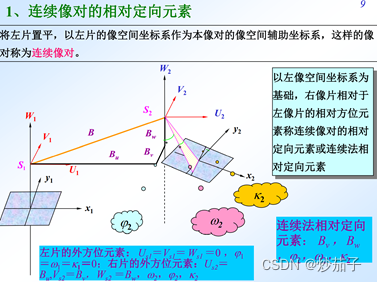
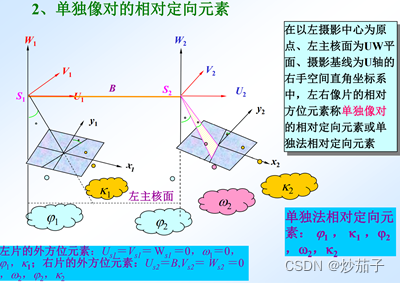
11 相对定向的标志是什么,不同方法的相对定向元素分别表示的哪些参数,绝对定向中有个重要的概念投影系数要知道。
- 相对定向的标志是两像片上同名像点的投影光线对对相交;
- 不同方法的相对定向元素分别表示的参数:
- 绝对定向中的投影系数:暂无
12 空间后方交会、前方交会、相对定向、绝对定向的概念、意义是什么,哪些是采用迭代求精的方式。要熟悉如何用后交-前交、相对定向-绝对定向求地面点坐标。
- 空间后方交会:利用至少3个已知的地面平高控制点,并量测出像片上对应的3个像点的坐标,以共线方程为基础,反求该像片的外方位元素。(意义就是用于求取像片的内方位元素)
- 前方交会:利用立体像对的内、外方位元素和像点坐标,由同名射线必然交于一点的原理来确定相应地面点的地面坐标。(意义就是用于确定地面点的坐标)
- 相对定向:恢复两张像片的相对位置,重建与实地相似的立体几何模型的过程。
- 绝对定向:指借助已知的地面控制点,把经过了相对定向的立体几何模型进行平移、旋转、缩放,将其纳入到地面摄影测量坐标系的过程。
13 双向解析有三种方法,三种方法的差异要知道,哪种方法精度最高,哪种精度比较低
- 后方交会-前方交会法:前方交会的结果依赖于后方交会的精度,前方交会的过程中没有充分利用多余条件进行平差计算。
- 相对定向-绝对定向法:计算公式较多,最终的点位精度取决于相对定向和绝对定向的精度,这种方法不能严格地表达外方位元素。
- 光束法严密解:理论严密、精度最高。待定点的坐标是按最小二乘原则求得的。
- 显然,前后方交会法的精度最低,光束法的精度最高。
14 解析空中三角测量、航带网法空中三角测量、Pos辅助的空中三角测量概念。
- 解析空中三角测量的定义:根据航摄像片上所量测的像点坐标和极少量的地面控制点,按一定的数学模型平差解算出所需的全部加密点和每张像片的外方位元素。
- 航带网法空中三角测量:首先在一个立体像对中,用连续法相对定向建立单个模型,然后把单个模型连接成航带模型,以构成航带自由网,再把航带模型视为一个单元模型进行绝对定向,最后再进行非线性改正。就可以最终求得加密点的地面坐标了。
- POS辅助空中三角测量:利用GPS获取摄站点的位置信息、利用IMU记录航摄相机的角度变化信息,从而直接解算出摄影瞬间的像片的6个外方位元素,这样就可以无需地面控制点甚至无需空中三角测量工序而直接实现测图或定位。
15 像片纠正、数字微分纠正是什么,目的和意义是什么
- 像片纠正:将倾斜摄影的航摄像片通过投影变换,获得相当于航摄像机物镜主光轴在铅 垂位置摄影的水平像片,并归化至规定的比例尺,或应用计算机按相应的数学关系式进 行解算,从原始非正射的数字影像获取数字 正射影像的作业过程;
- 数字微分纠正:直接利用计算机对数字影像进行逐个像元的微分纠正,称之为数字微分纠正;
- 两种纠正的目的和意义:为了消除原始像片与像片平面图之间 的差异,需要消除像片倾斜、地形起伏引起 的像点位移,并将影像归化为成图比例尺;
16 摄影测量的外业工作是什么,任务是什么,调绘片概念。
- 工作任务是:
1.摄影外业控制测量;
2. 像片的解译及调绘;
3.对于航摄漏洞以大面积的的云影、阴影、影像不清楚地区的补测工作;
- 经调绘的像片称调绘像片,简称调绘片;
17 如何利用摄影测量方法生产4D产品
4D产品分为DEM(数字高程模型)、DOM(数字正射影像图)、DLG(数字线划图)、DRG(数字栅格地图)。
- 对于DEM和DOM产品的制作,首先是准备好外业拍摄的影像文件,然后对其进行自动/手动内定向创建立体模型,接着进行自动/手动相对定向,再输入控制点文件进行绝对定向操作,然后采集核线影像和影像匹配,最后生成DEM并对其进行拼接;而DOM产品则通过DEM进行生成,同样进行拼接操作。
- 对于DLG产品的制作,首先也是准备好数据,然后对数据进行内定向、相对定向、绝对定向,接着进行核线影像和影像匹配,最后进行立体测图并生成DLG产品。
- 而DRG产品,则是基于生成的DOM产品与等高线(由DEM生成)生成叠加影像,然后与DLG产品进行处理最终得到DRG产品。
如果有问题,欢迎一起探讨.
<p>炒茄子</p>



![[内网渗透]—CS生成office宏钓鱼](https://img-blog.csdnimg.cn/b395816dc5254e5aaaefa81b16d590c3.png#pic_center)