本章,我们将介绍 STM32F103 对红外遥控器的信号解码。STM32 板子上标配的红外接收 头和一个小巧的红外遥控器。我们将利用 STM32 的输入捕获功能,解码开发板标配的红外遥控 器的编码信号,并将编码后的键值在 LCD 模块中显示出来。
红外遥控技术介绍
红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成 本低,易实现等显著优点,被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计 算机系统中。由于红外线遥控不具有像无线电遥控那样穿过障碍物去控制被控对象的能力,所 以,在设计红外线遥控器时,不必要像无线电遥控器那样,每套(发射器和接收器)要有不同的遥 控频率或编码(否则,就会隔墙控制或干扰邻居的家用电器),所以同类产品的红外线遥控器,可 以有相同的遥控频率或编码,而不会出现遥控信号“串门”的情况。这对于大批量生产以及在 家用电器上普及红外线遥控提供了极大的方便。由于红外线为不可见光,因此对环境影响很小, 再由红外光波动波长远小于无线电波的波长,所以红外线遥控不会影响其他家用电器,也不会 影响临近的无线电设备。
红外器件特性
红外遥控的情景中,必定会有一个红外发射端和红外接收端。在本实验中,正点原子的红 外遥控器作为红外发射端,红外接收端就是板载的红外接收器,实物图可以查看 39.2.3 小节原 理图部分。要使两者通信成功,收/发红外波长与载波频率需一致,在这里波长就是 940nm,载 波频率就是 38kHz。
红外发射管也是属于二极管类,红外发射电路通常使用三极管控制红外发射器的导通或者 截至,在导通的时候,红外发射管会发射出红外光,反之,就不会发射出红外光。虽然我们用 肉眼看不到红外光,但是我们借助手机摄像头就能看到红外光。但是红外接收管的特性是当接 收到红外载波信号时,OUT 引脚输出低电平;假如没有接收到红外载波信号时,OUT 引脚输出 高电平。
红外载波信号其实就是由一个个红外载波周期组成。在频率为 38KHz 下,红外载波周期约 等于 26.3us(1s / 38KHz ≈ 26.3us)。在一个红外载波发射周期里,发射红外光时间 8.77us 和 不发射红外光 17.53us,发射红外光的占空比一般为 1/3。相对的,整个周期内不发射红外光, 就是载波不发射周期。在红外遥控器内已经把载波和不载波信号处理好,我们需要做的就是识 别遥控器按键发射出的信号,信号也是遵循某种协议的。
红外编解码协议介绍
红外遥控的编码方式目前广泛使用的是:PWM(脉冲宽度调制)的 NEC 协议和 Philips PPM (脉冲位置调制)的 RC-5 协议的。开发板配套的遥控器使用的是 NEC 协议,其特征如下:
1、8 位地址和 8 位指令长度;
2、地址和命令 2 次传输(确保可靠性);
3、PWM 脉冲位置调制,以发射红外载波的占空比代表“0”和“1”;
4、载波频率为 38Khz;
5、位时间为 1.125ms 或 2.25ms;
在 NEC 协议中,如何为协议中的数据‘0’或者‘1’?这里分开红外接收器和红外发射 器。
红外发射器:
发送协议数据‘0’ = 发射载波信号 560us + 不发射载波信号 560us
发送协议数据‘1’ = 发射载波信号 560us + 不发射载波信号 1680us
红外发射器的位定义如下图所示: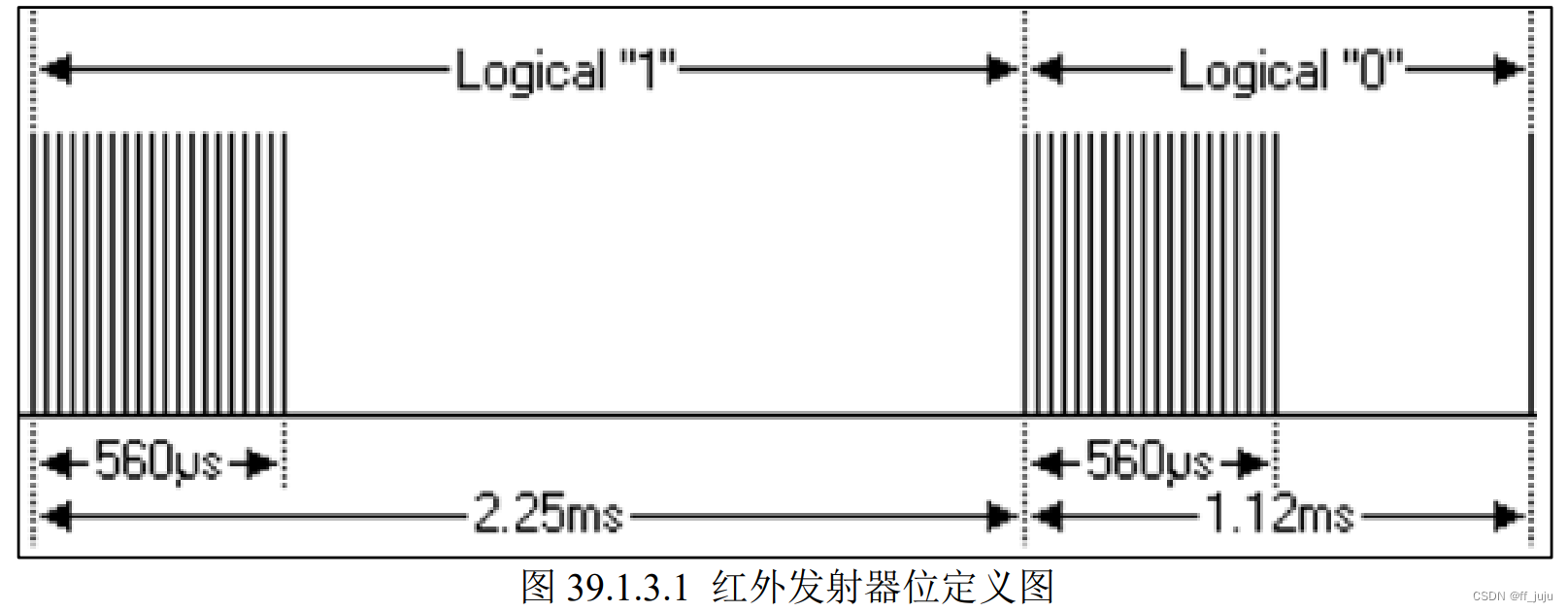 红外接收器:
红外接收器:
接收到协议数据‘0’ = 560us 低电平 + 560us 高电平
接收到协议数据‘1’ = 560us 低电平 + 1680us 高电平
红外接收器的位定义如下图所示: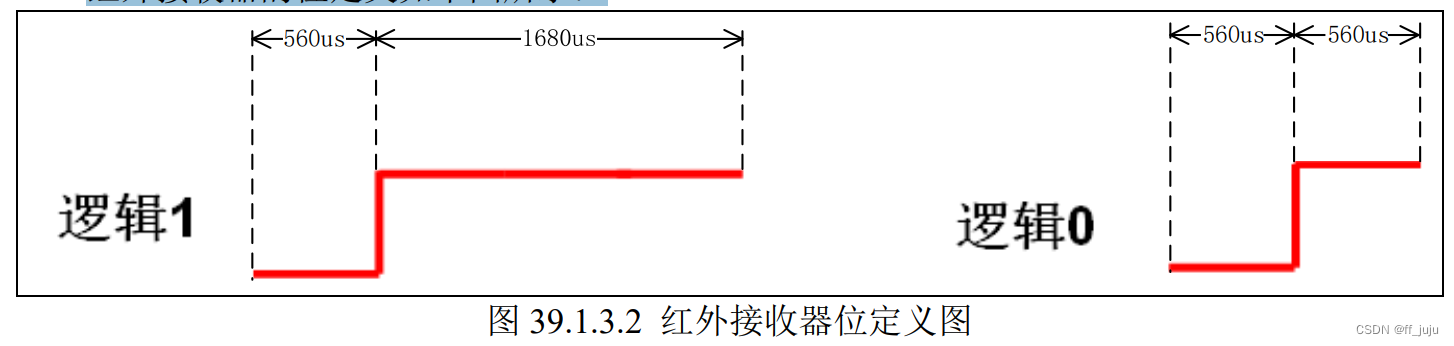 NEC 遥控指令的数据格式为:同步码头、地址码、地址反码、控制码、控制反码。同步 码由一个 9ms 的低电平和一个 4.5ms 的高电平组成,地址码、地址反码、控制码、控制反码 均是 8 位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性 (可用于校验)。
NEC 遥控指令的数据格式为:同步码头、地址码、地址反码、控制码、控制反码。同步 码由一个 9ms 的低电平和一个 4.5ms 的高电平组成,地址码、地址反码、控制码、控制反码 均是 8 位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性 (可用于校验)。
我们遥控器的按键▽按下时,从红外接收头端收到的波形如图 39.1.3.3 所示:
 从上图中可以看到,其地址码为 0,控制码为 21(正确解码后 00010101)。可以看到在 100ms 之后,我们还收到了几个脉冲,这是 NEC 码规定的连发码(由 9ms 低电平+2.5ms 高电 平+0.56ms 低电平+97.94ms 高电平组成),如果在一帧数据发送完毕之后,按键仍然没有放 开,则发射重复码,即连发码可以通过统计连发码的次数来标记按键按下的长短/次数。
从上图中可以看到,其地址码为 0,控制码为 21(正确解码后 00010101)。可以看到在 100ms 之后,我们还收到了几个脉冲,这是 NEC 码规定的连发码(由 9ms 低电平+2.5ms 高电 平+0.56ms 低电平+97.94ms 高电平组成),如果在一帧数据发送完毕之后,按键仍然没有放 开,则发射重复码,即连发码可以通过统计连发码的次数来标记按键按下的长短/次数。
第二十一章我们曾经介绍过利用输入捕获来测量高电平的脉宽,本章解码红外遥控信号, 刚好可以利用输入捕获的这个功能来实现遥控解码。关于输入捕获的介绍,请参考第二十一章 的内容。
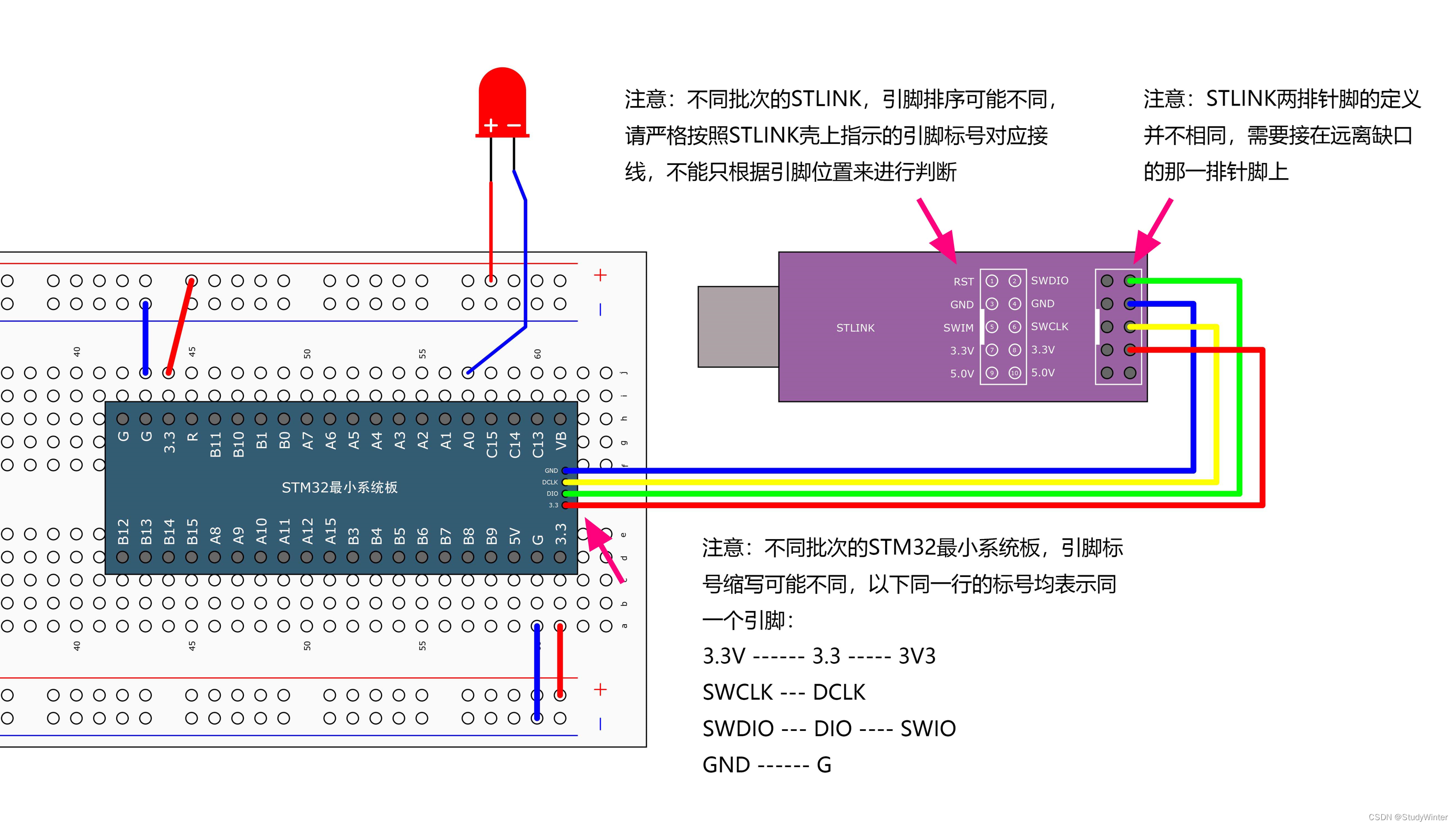
红外遥控接收头与 STM32 的连接关系,如下图所示:
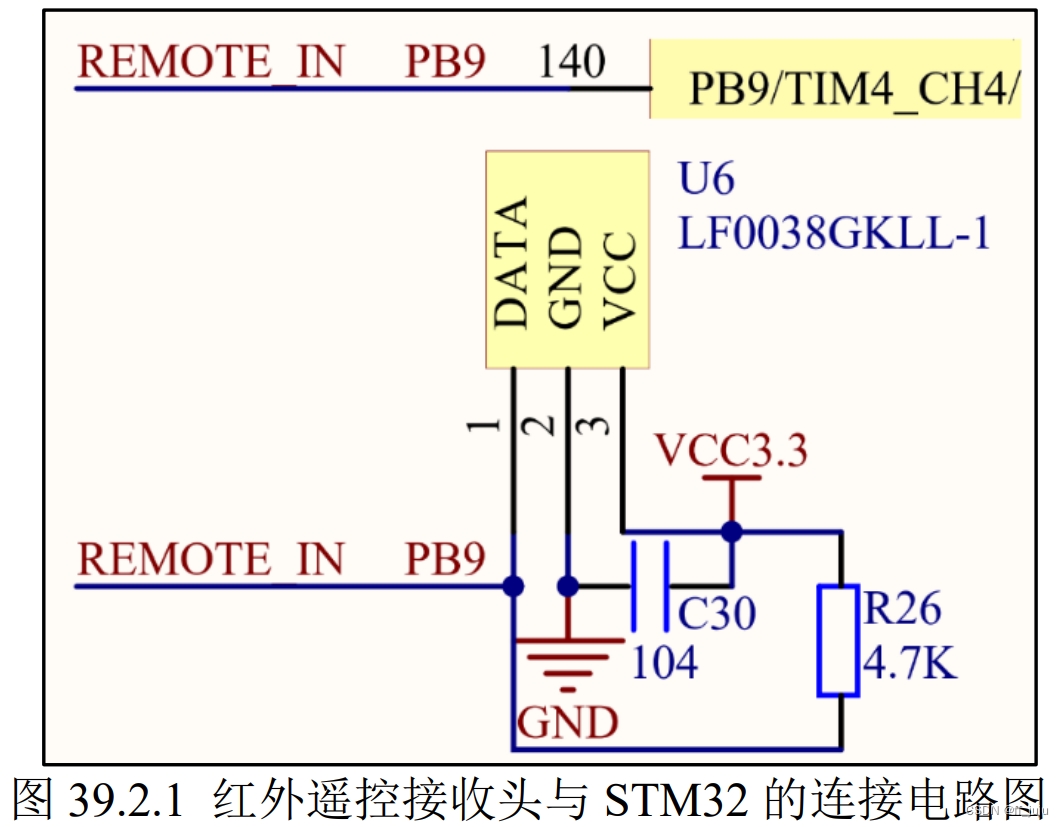 红外遥控接收头连接在 STM32 的 PB9(TIM4_CH4)上。硬件上不需要变动,只需要程序将 TIM4_CH4 设计输入捕获,然后将接收到的脉冲信号解码就可以了。
红外遥控接收头连接在 STM32 的 PB9(TIM4_CH4)上。硬件上不需要变动,只需要程序将 TIM4_CH4 设计输入捕获,然后将接收到的脉冲信号解码就可以了。
代码
#ifndef __REMOTE_H
#define __REMOTE_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* 红外输入引脚及定时器 定义 */
#define REMOTE_IN_GPIO_PORT GPIOB
#define REMOTE_IN_GPIO_PIN GPIO_PIN_9
#define REMOTE_IN_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
#define REMOTE_IN_TIMX TIM4
#define REMOTE_IN_TIMX_IRQn TIM4_IRQn
#define REMOTE_IN_TIMX_IRQHandler TIM4_IRQHandler
#define REMOTE_IN_TIMX_CHY TIM_CHANNEL_4 /* 通道Y, 1<= Y <=2*/
#define REMOTE_IN_TIMX_CCRY REMOTE_IN_TIMX->CCR4
#define REMOTE_IN_TIMX_CHY_CLK_ENABLE() do{ __HAL_RCC_TIM4_CLK_ENABLE(); }while(0) /* TIMX 时钟使能 */
/******************************************************************************************/
#define RDATA HAL_GPIO_ReadPin(REMOTE_IN_GPIO_PORT, REMOTE_IN_GPIO_PIN) /* 红外数据输入脚 */
/* 红外遥控识别码(ID),每款遥控器的该值基本都不一样,但也有一样的.
* 我们选用的遥控器识别码为0
*/
#define REMOTE_ID 0
extern uint8_t g_remote_cnt; /* 按键按下的次数 */
void remote_init(void); /* 红外传感器接收头引脚初始化 */
uint8_t remote_scan(void);
#endif
#include "./BSP/REMOTE/remote.h"
#include "./SYSTEM/delay/delay.h"
#include "./SYSTEM/usart/usart.h"
TIM_HandleTypeDef g_tim4_handle; /* 定时器4句柄 */
/**
* @brief 红外遥控初始化
* @note 设置IO以及定时器的输入捕获
* @param 无
* @retval 无
*/
void remote_init(void)
{
TIM_IC_InitTypeDef tim_ic_init_handle;
g_tim4_handle.Instance = REMOTE_IN_TIMX; /* 通用定时器4 */
g_tim4_handle.Init.Prescaler = (72-1); /* 预分频器,1M的计数频率,1us加1 */
g_tim4_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数器 */
g_tim4_handle.Init.Period = 10000; /* 自动装载值 */
g_tim4_handle.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_IC_Init(&g_tim4_handle);
/* 初始化TIM4输入捕获参数 */
tim_ic_init_handle.ICPolarity = TIM_ICPOLARITY_RISING; /* 上升沿捕获 */
tim_ic_init_handle.ICSelection = TIM_ICSELECTION_DIRECTTI; /* 映射到TI4上 */
tim_ic_init_handle.ICPrescaler = TIM_ICPSC_DIV1; /* 配置输入分频,不分频 */
tim_ic_init_handle.ICFilter = 0x03; /* IC1F=0003 8个定时器时钟周期滤波 */
HAL_TIM_IC_ConfigChannel(&g_tim4_handle, &tim_ic_init_handle, REMOTE_IN_TIMX_CHY);/* 配置TIM4通道4 */
HAL_TIM_IC_Start_IT(&g_tim4_handle, REMOTE_IN_TIMX_CHY); /* 开始捕获TIM的通道值 */
__HAL_TIM_ENABLE_IT(&g_tim4_handle, TIM_IT_UPDATE); /* 使能更新中断 */
}
/**
* @brief 定时器4底层驱动,时钟使能,引脚配置
* @param htim:定时器句柄
* @note 此函数会被HAL_TIM_IC_Init()调用
* @retval 无
*/
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == REMOTE_IN_TIMX)
{
GPIO_InitTypeDef gpio_init_struct;
REMOTE_IN_GPIO_CLK_ENABLE(); /* 红外接入引脚GPIO时钟使能 */
REMOTE_IN_TIMX_CHY_CLK_ENABLE(); /* 定时器时钟使能 */
__HAL_AFIO_REMAP_TIM4_DISABLE(); /* 这里用的是PB9/TIM4_CH4,参考AFIO_MAPR寄存器的设置 */
gpio_init_struct.Pin = REMOTE_IN_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_AF_INPUT; /* 复用输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(REMOTE_IN_GPIO_PORT, &gpio_init_struct); /* 初始化定时器通道引脚 */
HAL_NVIC_SetPriority(REMOTE_IN_TIMX_IRQn, 1, 3); /* 设置中断优先级,抢占优先级1,子优先级3 */
HAL_NVIC_EnableIRQ(REMOTE_IN_TIMX_IRQn); /* 开启ITM4中断 */
}
}
/* 遥控器接收状态
* [7] : 收到了引导码标志
* [6] : 得到了一个按键的所有信息
* [5] : 保留
* [4] : 标记上升沿是否已经被捕获
* [3:0]: 溢出计时器
*/
uint8_t g_remote_sta = 0;
uint32_t g_remote_data = 0; /* 红外接收到的数据 */
uint8_t g_remote_cnt = 0; /* 按键按下的次数 */
/**
* @brief 定时器中断服务函数
* @param 无
* @retval 无
*/
void REMOTE_IN_TIMX_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_tim4_handle); /* 定时器共用处理函数 */
}
/**
* @brief 定时器更新中断回调函数
* @param htim:定时器句柄
* @retval 无
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == REMOTE_IN_TIMX)
{
if (g_remote_sta & 0x80) /* 上次有数据被接收到了 */
{
g_remote_sta &= ~0X10; /* 取消上升沿已经被捕获标记 */
if ((g_remote_sta & 0X0F) == 0X00)
{
g_remote_sta |= 1 << 6; /* 标记已经完成一次按键的键值信息采集 */
}
if ((g_remote_sta & 0X0F) < 14)
{
g_remote_sta++;
}
else
{
g_remote_sta &= ~(1 << 7); /* 清空引导标识 */
g_remote_sta &= 0XF0; /* 清空计数器 */
}
}
}
}
/**
* @brief 定时器输入捕获中断回调函数
* @param htim:定时器句柄
* @retval 无
*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == REMOTE_IN_TIMX)
{
uint16_t dval; /* 下降沿时计数器的值 */
if (RDATA) /* 上升沿捕获 */
{
__HAL_TIM_SET_CAPTUREPOLARITY(&g_tim4_handle,REMOTE_IN_TIMX_CHY,TIM_INPUTCHANNELPOLARITY_FALLING);//CC4P=1 设置为下降沿捕获
__HAL_TIM_SET_COUNTER(&g_tim4_handle, 0); /* 清空定时器值 */
g_remote_sta |= 0X10; /* 标记上升沿已经被捕获 */
}
else /* 下降沿捕获 */
{
dval=HAL_TIM_ReadCapturedValue(&g_tim4_handle, REMOTE_IN_TIMX_CHY); /* 读取CCR4也可以清CC4IF标志位 */
__HAL_TIM_SET_CAPTUREPOLARITY(&g_tim4_handle, REMOTE_IN_TIMX_CHY, TIM_INPUTCHANNELPOLARITY_RISING);/* 配置TIM4通道4上升沿捕获 */
if (g_remote_sta & 0X10) /* 完成一次高电平捕获 */
{
if (g_remote_sta & 0X80) /* 接收到了引导码 */
{
if (dval > 300 && dval < 800) /* 560为标准值,560us */
{
g_remote_data >>= 1; /* 右移一位 */
g_remote_data &= ~(0x80000000); /* 接收到0 */
}
else if (dval > 1400 && dval < 1800) /* 1680为标准值,1680us */
{
g_remote_data >>= 1; /* 右移一位 */
g_remote_data |= 0x80000000; /* 接收到1 */
}
else if (dval > 2000 && dval < 3000) /* 得到按键键值增加的信息 2500为标准值2.5ms */
{
g_remote_cnt++; /* 按键次数增加1次 */
g_remote_sta &= 0XF0; /* 清空计时器 */
}
}
else if (dval > 4200 && dval < 4700) /* 4500为标准值4.5ms */
{
g_remote_sta |= 1 << 7; /* 标记成功接收到了引导码 */
g_remote_cnt = 0; /* 清除按键次数计数器 */
}
}
g_remote_sta&=~(1<<4);
}
}
}
/**
* @brief 处理红外按键(类似按键扫描)
* @param 无
* @retval 0 , 没有任何按键按下
* 其他, 按下的按键键值
*/
uint8_t remote_scan(void)
{
uint8_t sta = 0;
uint8_t t1, t2;
if (g_remote_sta & (1 << 6)) /* 得到一个按键的所有信息了 */
{
t1 = g_remote_data; /* 得到地址码 */
t2 = (g_remote_data >> 8) & 0xff; /* 得到地址反码 */
if ((t1 == (uint8_t)~t2) && t1 == REMOTE_ID) /* 检验遥控识别码(ID)及地址 */
{
t1 = (g_remote_data >> 16) & 0xff;
t2 = (g_remote_data >> 24) & 0xff;
if (t1 == (uint8_t)~t2)
{
sta = t1; /* 键值正确 */
}
}
if ((sta == 0) || ((g_remote_sta & 0X80) == 0)) /* 按键数据错误/遥控已经没有按下了 */
{
g_remote_sta &= ~(1 << 6); /* 清除接收到有效按键标识 */
g_remote_cnt = 0; /* 清除按键次数计数器 */
}
}
return sta;
}
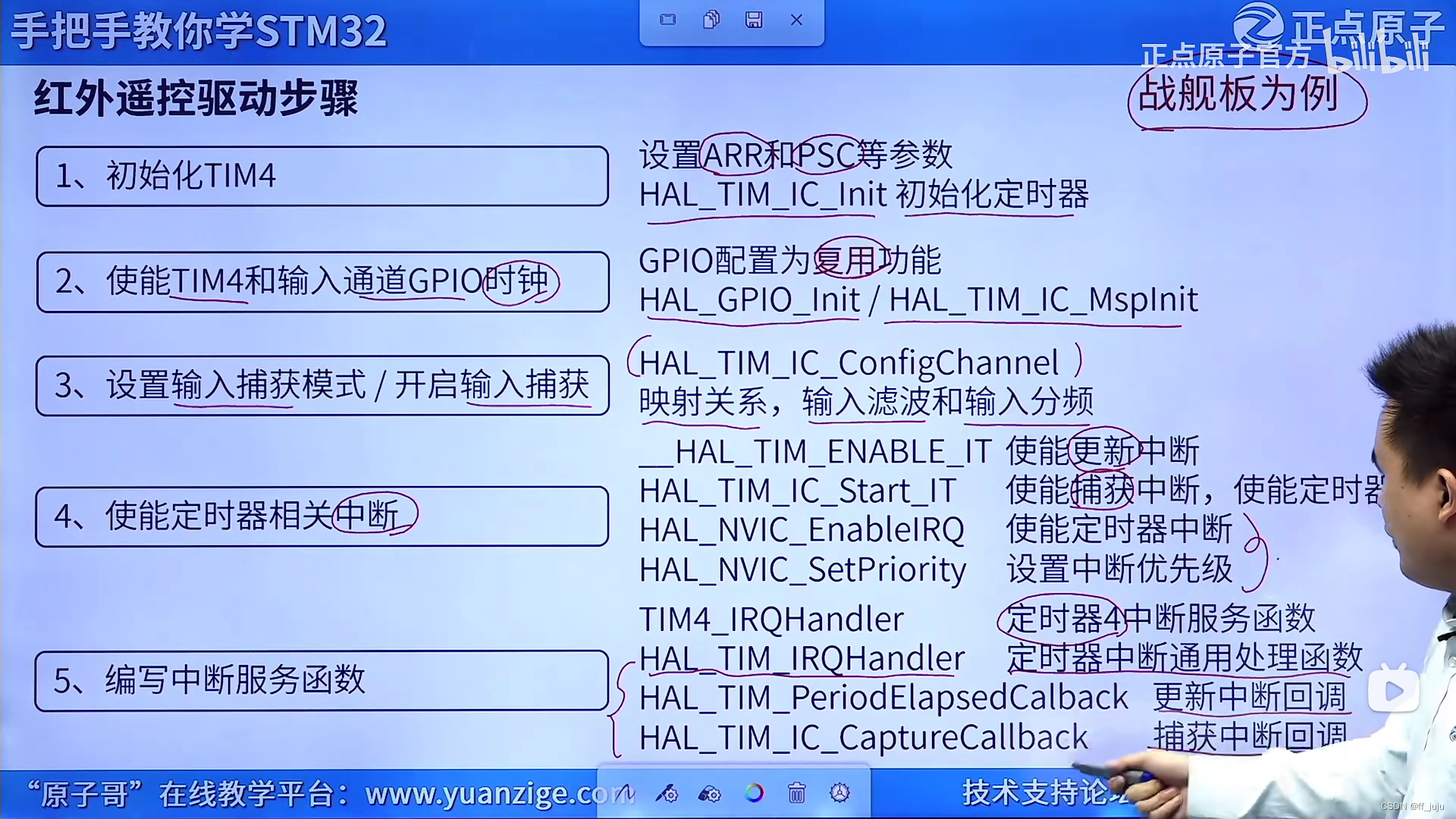
remote_init 函数主要是对红外遥控使用到的定时器 4 和定时器通道 4 进行相关配置,关于 定时器 4 通道 4 的 IO 放在回调函数 HAL_TIM_IC_MspInit 中初始化。
在 remote_init 函数中,通过调用 HAL_TIM_IC_Init 函数初始化定时器的 ARR 和 PSC 等参 数;通过调用 HAL_TIM_IC_ConfigChannel 函数配置映射关系,滤波和分频等;最后调用 HAL_TIM_IC_Start_IT 和__HAL_TIM_ENABLE_IT 分别使能捕获通道和使能定时器中断。
在 HAL_TIM_IC_MspInit 函数中主要通过 HAL_GPIO_Init 函数对定时器输入通道的 GPIO 口进行配置,最后还需要设置中断抢占优先级和响应优先级。
通过上面两个函数的配置后,定时器的输入捕获已经初始化完成,接下来我们还需要作一 些接收处理,下面先介绍一下三个变量。
这三个变量用于辅助实现高电平的捕获。其中 g_remote_sta 是用来记录捕获状态,这个变 量,我们把它当成一个寄存器来使用。对其各位进行定义,描述如下表所示:

变量 g_remote_data 用于存放红外接收到的数据,而 g_remote_cnt 是存放按键按下的次数。
现在我们来介绍一下,捕获高电平脉宽的思路:首先,设置 TIM4_CH4 捕获上升沿,然后 等待上升沿中断到来,当捕获到上升沿中断,设置该通道为下降沿捕获,清除 TIM4_CNT 寄存 器的值,最后把 g_remote_sta 的位 4 置 1,表示已经捕获到高电平,等待下降沿到来。当下降沿 到来的时候,读取此时定时器计数器的值到 dval 中并设置该通道为上升沿捕获,然后判断 dval 的值属于哪个类型(引导码,数据 0,数据 1 或者重发码),相对应就把 g_remote_sta 相关位进 行调整。例如,一开始识别为引导码的情况,就需要把 g_remote_sta 第 7 位置 1。当检测到重复 码,就把按键次数增量存放在 g_remote_cnt 变量中。
定时器更新中断回调函数主要是对标志位进行管理。在函数内通过 g_remote_sta 标志的判 断,主要思路就是:在接收到引导码的前提下,对 g_remote_sta 状态进行判断并在符合条件下 进行运算,这里主要就做了两件事:标记完成一次按键信息采集和是否松开按键(即没有接收 到数据)。当完成一次按键信息采集时,g_remote_data 已经存放了控制反码、控制码、地址反 码、地址码。那为啥可以检测是否可以松开按键?是因为接收到重发码的情况下会清空计数器, 所以说当我们松开按键接收不到重发码时,溢出中断次数增多最终会导致 g_remote_sta&0x0f 值 大于 14,进而就可以把引导码,计数器清空,便于下一次的接收。
remote_scan 函数是用来扫描解码结果的,相当于我们的按键扫描,输入捕获解码的红外数 据,通过该函数传送给其他程序。
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/REMOTE/remote.h"
int main(void)
{
uint8_t key;
uint8_t t = 0;
char *str = 0;
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
remote_init(); /* 红外接收初始化 */
lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);
lcd_show_string(30, 70, 200, 16, 16, "REMOTE TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
lcd_show_string(30, 110, 200, 16, 16, "KEYVAL:", RED);
lcd_show_string(30, 130, 200, 16, 16, "KEYCNT:", RED);
lcd_show_string(30, 150, 200, 16, 16, "SYMBOL:", RED);
while (1)
{
key = remote_scan();
if (key)
{
lcd_show_num(86, 110, key, 3, 16, BLUE); /* 显示键值 */
lcd_show_num(86, 130, g_remote_cnt, 3, 16, BLUE); /* 显示按键次数 */
switch (key)
{
case 0:
str = "ERROR";
break;
case 69:
str = "POWER";
break;
case 70:
str = "UP";
break;
case 64:
str = "PLAY";
break;
case 71:
str = "ALIENTEK";
break;
case 67:
str = "RIGHT";
break;
case 68:
str = "LEFT";
break;
case 7:
str = "VOL-";
break;
case 21:
str = "DOWN";
break;
case 9:
str = "VOL+";
break;
case 22:
str = "1";
break;
case 25:
str = "2";
break;
case 13:
str = "3";
break;
case 12:
str = "4";
break;
case 24:
str = "5";
break;
case 94:
str = "6";
break;
case 8:
str = "7";
break;
case 28:
str = "8";
break;
case 90:
str = "9";
break;
case 66:
str = "0";
break;
case 74:
str = "DELETE";
break;
}
lcd_fill(86, 150, 116 + 8 * 8, 170 + 16, WHITE); /* 清楚之前的显示 */
lcd_show_string(86, 150, 200, 16, 16, str, BLUE); /* 显示SYMBOL */
}
else
{
delay_ms(10);
}
t++;
if (t == 20)
{
t = 0;
LED0_TOGGLE(); /* LED0闪烁 */
}
}
}
 此时我们通过遥控器按下不同的按键,则可以看到 LCD 上显示了不同按键的键值以及按 键次数和对应的遥控器上的符号。如图 39.4.2 所示。
此时我们通过遥控器按下不同的按键,则可以看到 LCD 上显示了不同按键的键值以及按 键次数和对应的遥控器上的符号。如图 39.4.2 所示。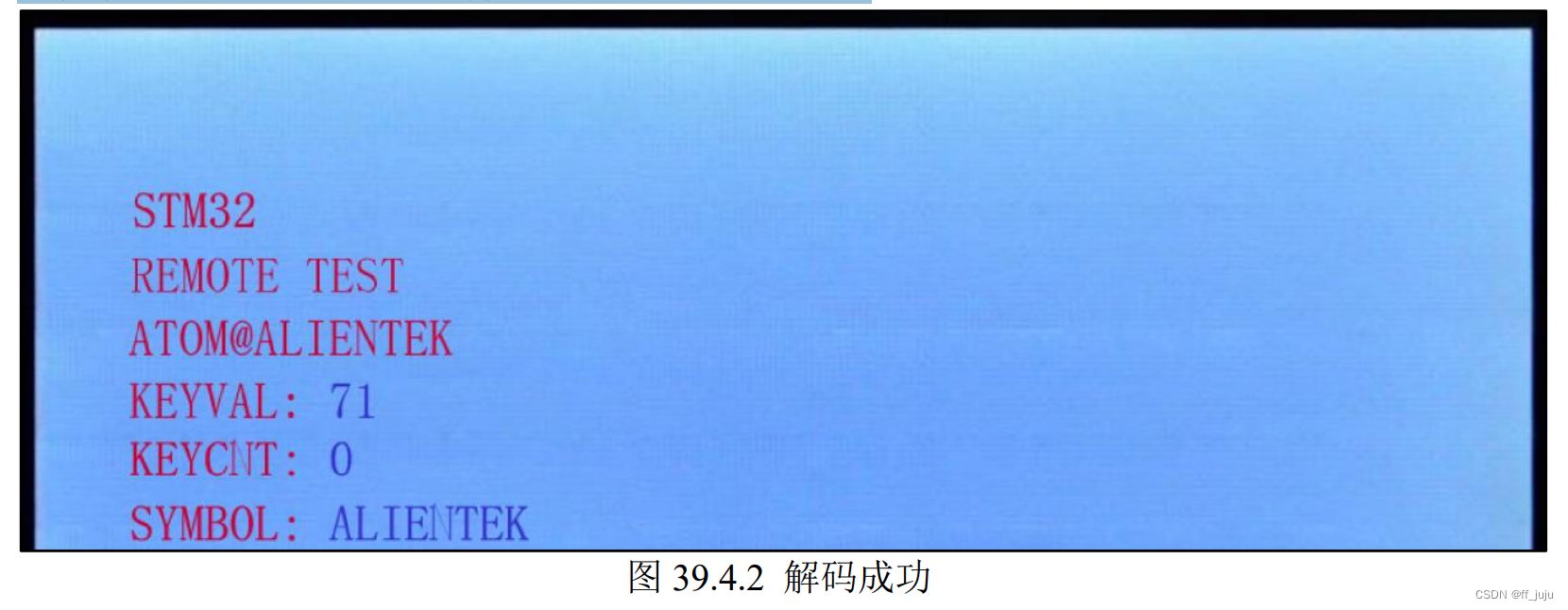



![web:[ZJCTF 2019]NiZhuanSiWei1](https://img-blog.csdnimg.cn/360a2fbfc1da43f5a7432d61805209b7.png)