- Lecture1 Overview of CG 计算机图形学概述
- Lecture2 Review of Linear Algebra 向量与线性代数
- Lecture3 2D Transformation 基础变换(二维)
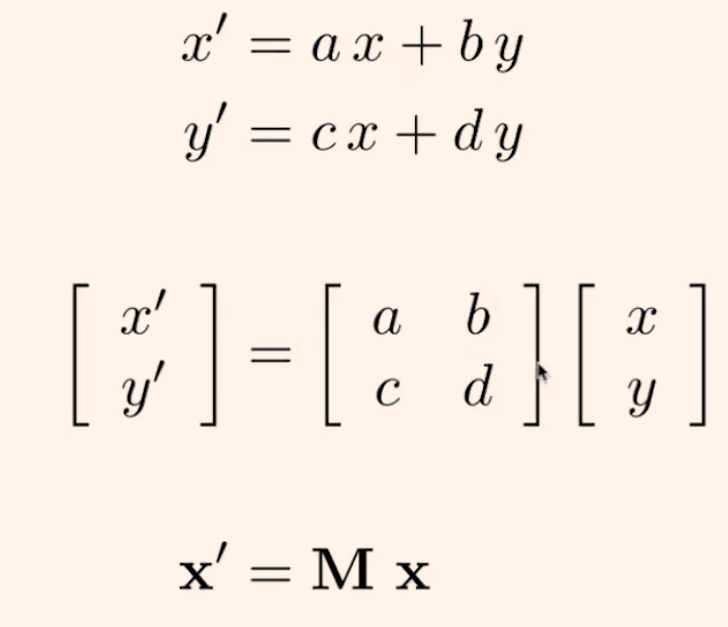
- 3.1 线性变换 (寻找变换前后直角坐标坐标关系)
- 3.2齐次坐标 Homogeneous Coordinate
- 3.3 仿射变换Affine Transformations
- 3.4 逆变换
- 3.5 复合变换
- Lecture4 3D Transformation 基础变换(三维)
- 4.1 3D齐次坐标
- 4.2 3D仿射变换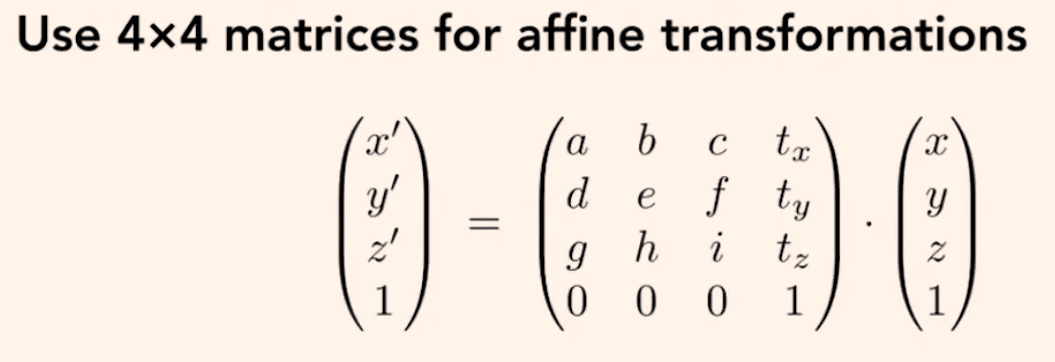
在线平台GAMES链接
Lecture1 Overview of CG 计算机图形学概述
计算机图形学主题: 学习图形学,而不是图形学API(如OPENGL)
- Rasterization(光栅化)
- Curves and Meshes(曲线和曲面)
- Ray Tracing(光线追踪)
- Animation/Simulation(动画和仿真)
Lecture2 Review of Linear Algebra 向量与线性代数
(高中数学足矣,重要的是这些公式在图形学中的应用)
(列)向量 AB=B-A
向量标准化: 单位向量= a / ||a||
向量加法
向量点乘 :ab=||a||||b||cosγ,用于提供两个向量是否接近
向量叉乘 :axb=||a||||b||sinγ (方向右手定则),用于判断左右(两个向量的左右)/内外(三角形内外)
直角坐标系
矩阵运算
Lecture3 2D Transformation 基础变换(二维)
3.1 线性变换 (寻找变换前后直角坐标坐标关系)
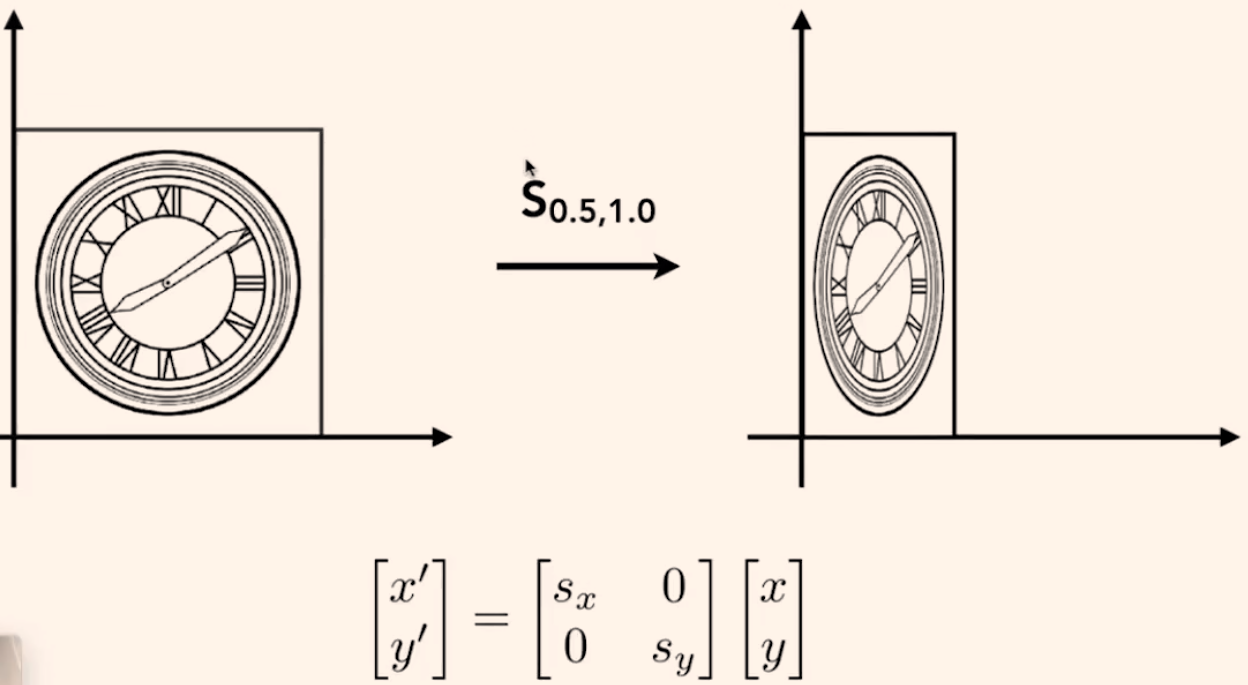
非均匀缩放
反射

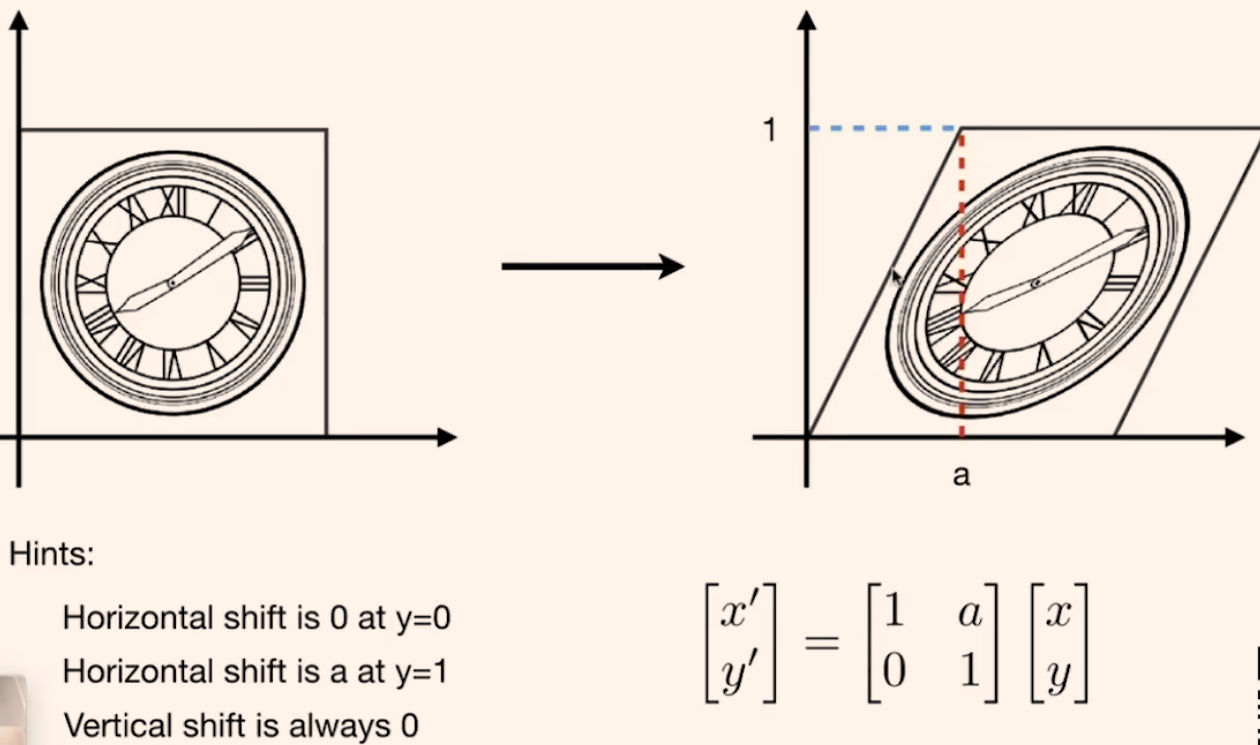
切变
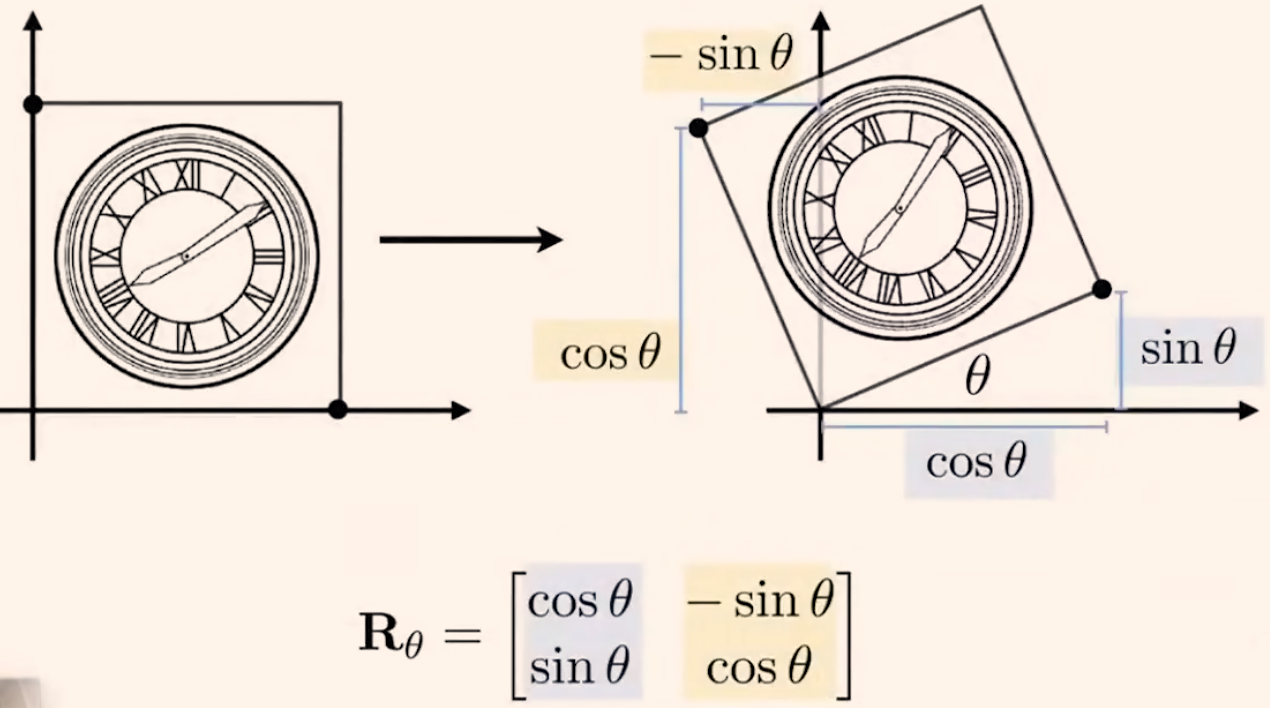
旋转(绕原点,逆时针) 旋转矩阵记忆法:行列式=1
3.2齐次坐标 Homogeneous Coordinate
引入原因:普通直角坐标系中,平移不能写成矩阵乘法,不属于线性变换。引入齐次坐标:就可以将 线性变换 和 平移变换,即所有变换,统一用矩阵乘法表示。

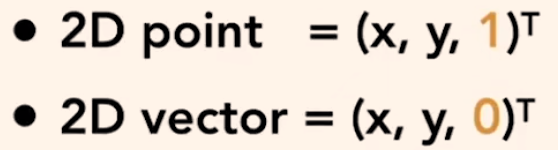
齐次坐标:相比于普通直角坐标,点和向量都增加一个维度,点的第三维=1,向量的第三维=0.
V+V=V,P-P=V,P+V=P,P+P=中点
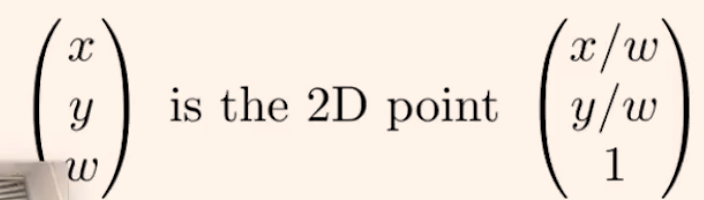
结论:(x, y, w) = (x/w, y/w, 1)
平移变换(齐次坐标表示): 妙

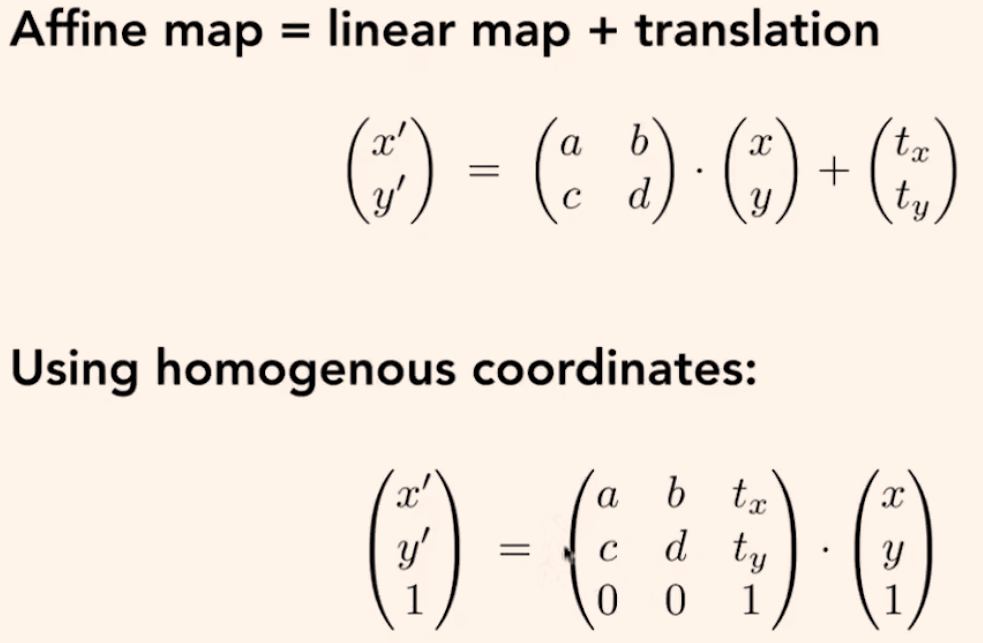
3.3 仿射变换Affine Transformations
2D仿射变换:所有线性变换+平移变换的综合体,用齐次坐标的矩阵乘法即可统一,最后一行永远是(0,0,1)。
2D缩放/旋转/平移的仿射变换矩阵

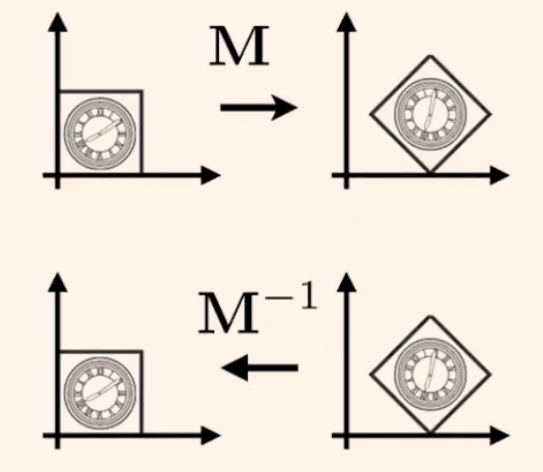
3.4 逆变换
用仿射变换矩阵乘法表示,相当于乘变换矩阵M的逆矩阵。
3.5 复合变换
复杂的变换可以通过简单的变换组合而成(通过矩阵的多次乘法实现),但变换的顺序很重要(即矩阵乘法顺序很重要,矩阵乘法没有交换律),向量是列向量,矩阵放左边,多个矩阵从右到左应用到向量上。
多个变换矩阵Ai一个一个应用(变换的分解) 等价于 一个复合变换矩阵An…A1一次性应用(变换的复合)

Lecture4 3D Transformation 基础变换(三维)
4.1 3D齐次坐标
同样引入齐次坐标:相比于普通直角坐标,点和向量都增加一个维度,点的第三维=1,向量的第三维=0.

结论:(x, y, z, w) = (x/w, y/w, z/w, 1)

4.2 3D仿射变换
三维到二维变换(模型、视图、投影)
光栅化(离散化三角形)
光栅化(深度测试与抗锯齿)
着色(光照与基本着色模型)
着色(着色频率、图形管线、纹理映射)
几何(基本表示方法)
几何(曲线与曲面)
几何(前沿动态)
光线追踪(基本原理)
光线追踪(加速结构)
路径追踪与光的传播理论
复杂外观建模与光的传播、实时光线追踪(前沿动态)
相机、透镜与光场
颜色与感知
动画与模拟(基本概念、逆运动学、质点弹簧系统)
物质点法(前沿动态)



![玩以太坊链上项目的必备技能(内联汇编 [inline assembly]-Solidity之旅十八)](https://img-blog.csdnimg.cn/c42047118c434f5abb2732c75cae566e.png#pic_center)







![【GO】 K8s 管理系统项目[API部分--Namespace]](https://img-blog.csdnimg.cn/5791e0ae3bf64221a96e3a0febbb4f4f.png)
