1 介绍
Poisson表面重建算法是一种用于从点云数据生成平滑曲面模型的算法。它基于Michael Kazhdan等人在2006年发表的论文《Poisson surface reconstruction》。该算法通过将点云数据转换为体素表示,并利用Poisson方程来重建曲面。
该算法的基本原理是将点云数据转换为体素表示,然后通过求解Poisson方程来重建曲面。Poisson方程是一个偏微分方程,它描述了一个函数的Laplace算子(二阶导数)与该函数的散度之间的关系。通过求解Poisson方程,可以得到一个平滑的曲面模型,该模型与原始点云数据尽可能匹配。
在PCL(点云库)中,Poisson表面重建算法有以下一些参数可以调整:
setDepth:体素深度。该参数定义了体素表示的深度级别,影响生成的体素分辨率和曲面细节。较高的深度级别会导致更高的分辨率和更准确的曲面重建,但也会增加计算时间和内存消耗。
setscale:体素缩放因子。该参数定义了体素表示的缩放比例,影响生成的体素分辨率和曲面细节。较小的缩放因子会导致更高的分辨率和更准确的曲面重建,但也会增加计算时间和内存消耗。
setSolverDivide:求解器分割数。该参数定义了求解器在求解Poisson方程时的分割数。较大的分割数可以提高求解的准确性和稳定性,但也会增加计算时间和内存消耗。
setIsoDivide:等值面分割数。该参数定义了生成等值面的分割数。较大的分割数可以提高等值面的平滑度和细节,但也会增加计算时间和内存消耗。
setConfidence:置信度。该参数定义了曲面重建中点云数据的置信度。较高的置信度会使算法更加关注点云数据,而较低的置信度会使算法更加关注平滑曲面的生成。
setOutputPolygons:输出多边形。该参数定义了是否输出多边形表示的曲面模型。如果设置为true,则算法将输出多边形表示的曲面模型;如果设置为false,则算法将输出三角网格表示的曲面模型。一般使用默认参数即可
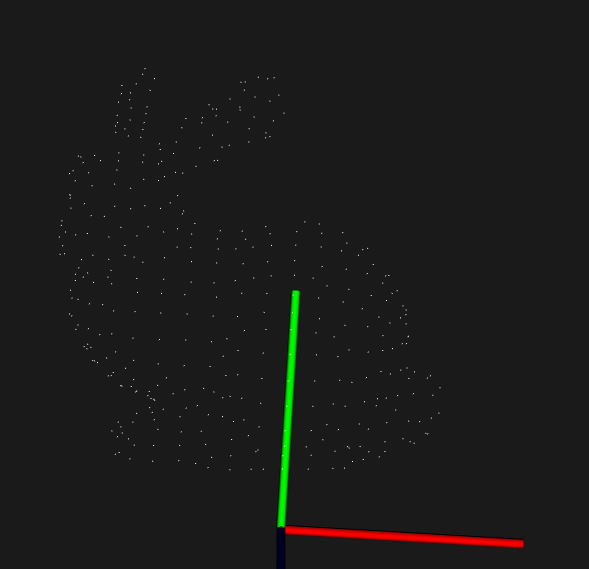
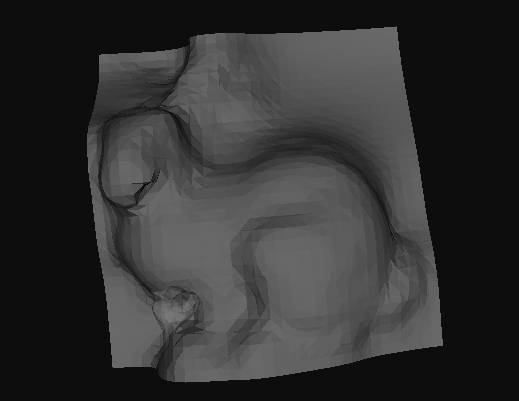
2 效果
3 代码
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d.h>
#include <pcl/surface/poisson.h>
#include <pcl/visualization/pcl_visualizer.h>
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCLPointCloud2 cloud2;
pcl::io::loadPCDFile("/home/lrj/work/pointCloudData/bun0.pcd",cloud2);
pcl::fromPCLPointCloud2(cloud2,*cloud);
// 估计点云的法向量
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud);
ne.setSearchMethod(tree);
ne.setKSearch(20);//最近邻搜索参数
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
ne.compute(*normals);
// 将法线添加到点云数据集中
pcl::PointCloud<pcl::PointNormal>::Ptr cloudWithNormals(new pcl::PointCloud<pcl::PointNormal>);
pcl::concatenateFields(*cloud, *normals, *cloudWithNormals);
// 创建Poisson重建对象
pcl::Poisson<pcl::PointNormal> poisson;
poisson.setInputCloud(cloudWithNormals);
// 执行Poisson重建
pcl::PolygonMesh mesh;
poisson.reconstruct(mesh);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Smoothed Point Cloud Viewer"));
viewer->setBackgroundColor(0.05, 0.05, 0.05,0);
viewer->addPolygonMesh(mesh, "mesh"); // 将Poisson曲面的网格数据mesh添加到PCL的可视化工具
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0.5, 0.5, 0.5, "mesh");//设置网格颜色为会灰色
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.8, "mesh");// 设置网格透明度为0.8,0为完全透明
while(!viewer->wasStopped())
{
viewer->spinOnce();
}
}