语音模块和阿里云图像识别结合
环境准备
代码实现
编译运行
写个shell脚本用于杀死运行的进程
语音模块和阿里云图像识别结合
使用语音模块和摄像头在香橙派上做垃圾智能分类识别
语音控制摄像下载上传阿里云解析功能点实现

环境准备
-
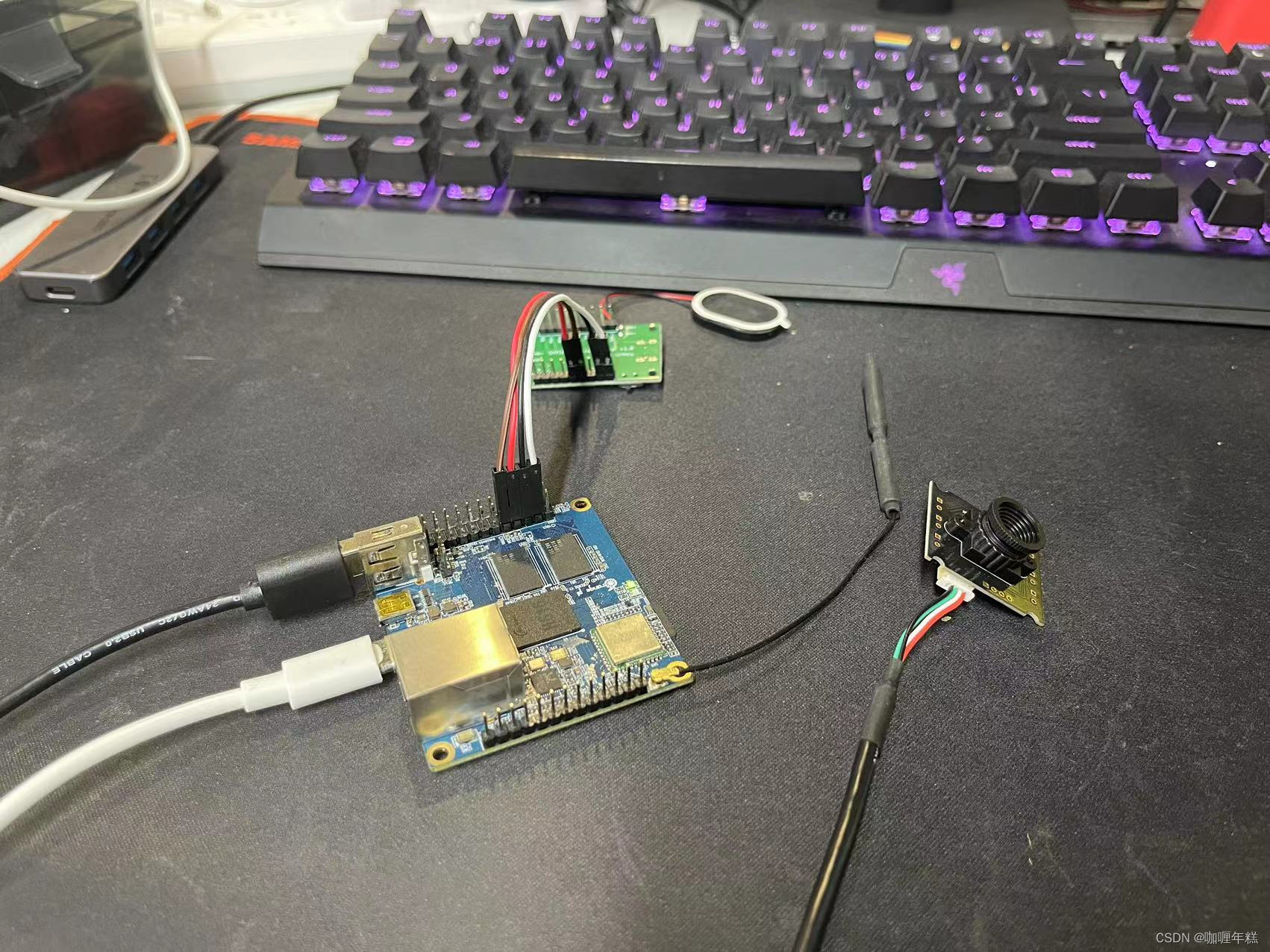
将语音模块接在UART5的位置
-
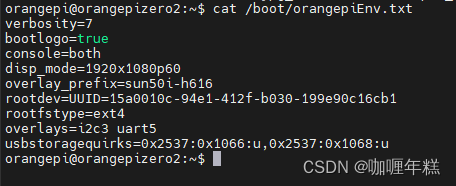
在orange pi 3.0.6上确认已经配置开启了uart5:(overlays=uart5)
cat /boot/orangepiEnv.txt
3. 同时将USB摄像头接到香橙派上
4. 确认已经运行了mjpg-streamer服务
ps ax | grep mjpg_streamer | grep -v grep

代码实现
main.c
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <errno.h>
#include "uartTool.h"
#include "garbage.h"
// 判断进程是否在运行
static int detect_process(const char * process_name)
{
int n = -1;
FILE *strm;
char buf[128] = {0};
// 构造命令字符串,通过ps命令查找进程
sprintf(buf, "ps -ax | grep %s|grep -v grep", process_name);
// 使用popen执行命令并读取输出
if ((strm = popen(buf, "r")) != NULL) {
if (fgets(buf, sizeof(buf), strm) != NULL) {
n = atoi(buf); // 将进程ID字符串转换为整数
}
}
else {
return -1; // popen失败
}
pclose(strm); // 关闭popen打开的文件流
return n;
}
int main(int argc, char *argv[])
{
int serial_fd = -1;
int ret = -1;
unsigned char buffer[6] = {0xAA, 0X55, 0x00, 0x00, 0x55, 0xAA};
int len = 0;
char *category = NULL;
// 初始化串口和垃圾分类模块
garbage_init ();
// 用于判断mjpg_streamer服务是否已经启动
ret = detect_process ("mjpg_streamer");
if (-1 == ret) {
printf("detect process failed\n");
goto END;
}
// 打开串口
serial_fd = my_serialOpen (SERIAL_DEV, BAUD);
if (-1 == serial_fd) {
goto END;
}
while (1) {
// 从串口读取数据
len = my_serialGetstring (serial_fd, buffer);
printf("lend = %d, buf[2] = 0x%x\n", len, buffer[2]);
if (len > 0 && buffer[2] == 0x46) {
buffer[2] = 0x00;
// 在执行wget命令之前添加调试输出
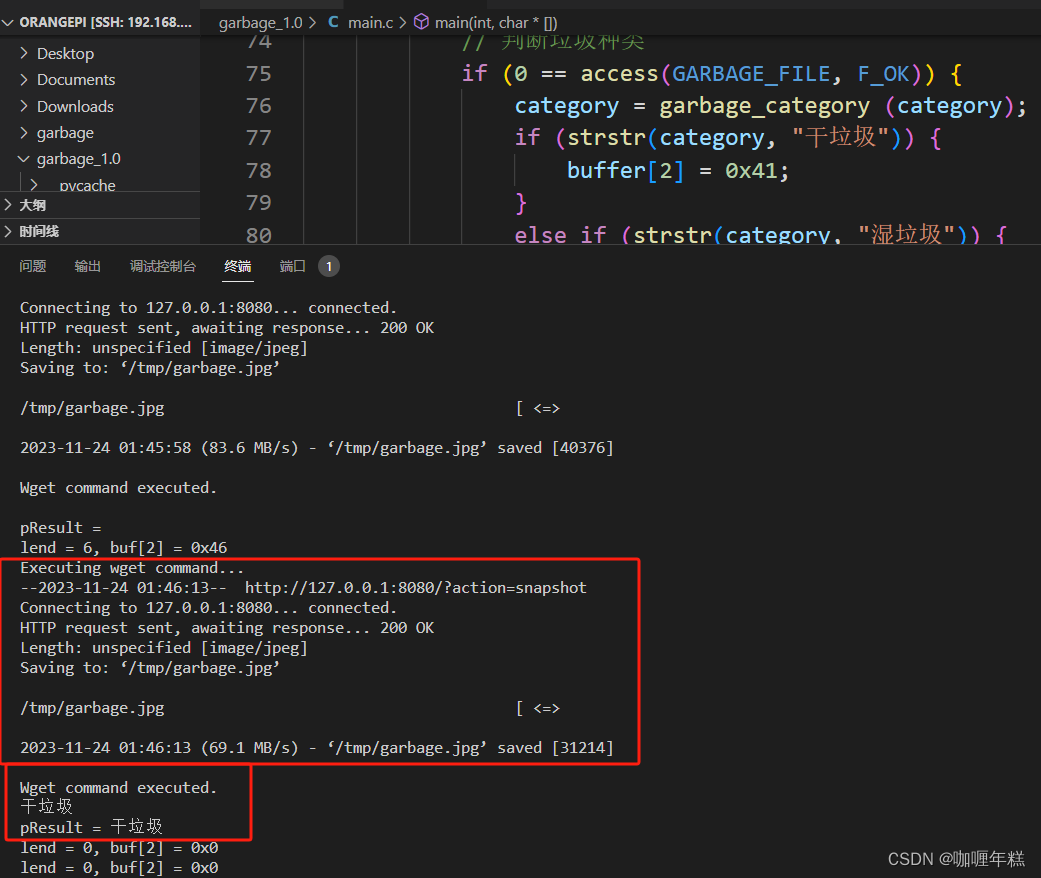
printf("Executing wget command...\n");
// 使用系统命令拍照
system(WGET_CMD);
// 在执行wget命令之后添加调试输出
printf("Wget command executed.\n");
// 判断垃圾种类
if (0 == access(GARBAGE_FILE, F_OK)) {
category = garbage_category (category);
if (strstr(category, "干垃圾")) {
buffer[2] = 0x41;
}
else if (strstr(category, "湿垃圾")) {
buffer[2] = 0x42;
}
else if (strstr(category, "可回收垃圾")) {
buffer[2] = 0x43;
}
else if (strstr(category, "有害垃圾")) {
buffer[2] = 0x44;
}
else {
buffer[2] = 0x45; //未识别到垃圾类型
}
}
else {
buffer[2] = 0x45; //识别失败
}
// 发送分类结果到串口
my_serialSendstring (serial_fd, buffer, 6);
buffer[2] = 0x00;
remove(GARBAGE_FILE); // 删除拍照文件
}
}
END:
// 释放垃圾分类资源
garbage_final();
return 0;
}
garbage.py
# garbage.py
# -*- coding: utf-8 -*-
# 引入依赖包
# pip install alibabacloud_imagerecog20190930
import os
import io
from urllib.request import urlopen
from alibabacloud_imagerecog20190930.client import Client
from alibabacloud_imagerecog20190930.models import ClassifyingRubbishAdvanceRequest
from alibabacloud_tea_openapi.models import Config
from alibabacloud_tea_util.models import RuntimeOptions
config = Config(
# 创建AccessKey ID和AccessKey Secret,请参考https://help.aliyun.com/document_detail/175144.html。
# 如果您用的是RAM用户的AccessKey,还需要为RAM用户授予权限AliyunVIAPIFullAccess,请参考https://help.aliyun.com/document_detail/145025.html
# 从环境变量读取配置的AccessKey ID和AccessKey Secret。运行代码示例前必须先配置环境变量。
access_key_id=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_ID'),
access_key_secret=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_SECRET'),
# 访问的域名
endpoint='imagerecog.cn-shanghai.aliyuncs.com',
# 访问的域名对应的region
region_id='cn-shanghai'
)
def alibaba_garbage():
# 场景一:文件在本地
img = open(r'/tmp/garbage.jpg', 'rb')
# 场景二:使用任意可访问的url
# url = 'https://viapi-test-bj.oss-cn-beijing.aliyuncs.com/viapi-3.0domepic/imagerecog/ClassifyingRubbish/ClassifyingRubbish1.jpg'
# img = io.BytesIO(urlopen(url).read())
classifying_rubbish_request = ClassifyingRubbishAdvanceRequest()
classifying_rubbish_request.image_urlobject = img
runtime = RuntimeOptions()
try:
# 初始化Client
client = Client(config)
response = client.classifying_rubbish_advance(classifying_rubbish_request, runtime)
# 获取整体结果
# print(response.body)
# 打印并返回需要的结果
print(response.body.to_map()['Data']['Elements'][0]['Category'])
return response.body.to_map()['Data']['Elements'][0]['Category']
except Exception as error:
# 获取整体报错信息
# print(error)
print(type('获取失败'))
return '获取失败'
# 获取单个字段
# print(error.code)
if __name__ == "__main__":
alibaba_garbage()
garbage.h
#ifndef __GARBAGE__H
#define __GARBAGE__H
void garbage_init();
void garbage_final();
char *garbage_category(char *category);
// 增加拍照指令和照片路径宏定义
#define WGET_CMD "wget http://127.0.0.1:8080/?action=snapshot -O /tmp/garbage.jpg"
#define GARBAGE_FILE "/tmp/garbage.jpg"
#endif
garbage.c
#include <stdio.h>
#include <Python.h>
#include "garbage.h"
void garbage_init()
{
// 初始化Python解释器
Py_Initialize();
// 获取sys.path对象
PyObject* sysPath = PySys_GetObject("path");
// 将当前路径添加到sys.path中
PyList_Append(sysPath, PyUnicode_DecodeFSDefault(".")); // PyUnicode_FromString将c字符串转换成Python字符串
}
void garbage_final()
{
// 关闭Python解释器
Py_Finalize();
}
char *garbage_category(char *category)
{
// 导入Python模块
PyObject* pModule = PyImport_ImportModule("garbage");
if (pModule != NULL) {
// 获取Python函数对象
PyObject* pFunction = PyObject_GetAttrString(pModule, "alibaba_garbage");
if (pFunction != NULL && PyCallable_Check(pFunction)) {
// 调用Python函数,这里是无参数调用
PyObject* pArgs = PyTuple_New(0); // 传递空参数元组
PyObject* pResult = PyObject_CallObject(pFunction, pArgs);
if (pResult != NULL) {
// 将返回值转换为C类型
char *result = NULL;
if (!PyArg_Parse(pResult, "s", &result)) {
PyErr_Print();
printf("Error: parse failed\n");
}
// 打印返回值
printf("pResult = %s\n", result);
// 为垃圾分类信息分配内存,复制返回值
category = (char *)malloc(sizeof(char) * (strlen(result) + 1));
memset(category, 0, (strlen(result) + 1));
strncpy(category, result, (strlen(result) + 1));
Py_DECREF(pResult);
} else {
PyErr_Print(); // 打印Python错误信息
}
Py_DECREF(pFunction);
Py_DECREF(pArgs);
} else {
PyErr_Print();
}
Py_DECREF(pModule);
} else {
PyErr_Print();
}
return category;
}
uartTool.h
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdarg.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include "wiringSerial.h"
#ifndef __UARTTOOL_H
#define __UARTTOOL_H
int my_serialOpen (const char *device, const int baud) ;
void my_serialSendstring (const int fd, const unsigned char *s, int len) ;
int my_serialGetstring (const int fd, unsigned char *buffer) ;
#define SERIAL_DEV "/dev/ttyS5"
#define BAUD 115200
#endif
uartTool.c
#include "wiringSerial.h"
#include "uartTool.h"
int my_serialOpen (const char *device, const int baud)
{
struct termios options ; // 创建一个termios结构体,用于串口参数设置
speed_t myBaud ; // 创建一个速度类型的变量 myBaud,用于保存波特率
int status, fd ; // 创建整数类型的变量 status 和 fd,用于保存状态和文件描述符
switch (baud){ // 根据传入的波特率参数选择合适的波特率常数
case 9600: myBaud = B9600 ; break ;
case 115200: myBaud = B115200 ; break ;
}
if ((fd = open (device, O_RDWR | O_NOCTTY | O_NDELAY | O_NONBLOCK)) == -1) // 打开串口设备,设置打开选项
return -1 ; // 如果打开失败,返回错误代码 -1
fcntl (fd, F_SETFL, O_RDWR) ; // 设置文件状态标志
// Get and modify current options: 获取并修改当前的串口参数:
tcgetattr (fd, &options) ; // 获取当前的串口参数
cfmakeraw (&options) ; // 初始化 termios 结构体为原始模式
cfsetispeed (&options, myBaud) ; // 设置输入波特率
cfsetospeed (&options, myBaud) ; // 设置输出波特率
options.c_cflag |= (CLOCAL | CREAD) ; // 本地连接和使能接收
options.c_cflag &= ~PARENB ; // 禁用奇偶校验
options.c_cflag &= ~CSTOPB ; // 1位停止位
options.c_cflag &= ~CSIZE ; // 用数据位掩码清空数据位设置
options.c_cflag |= CS8 ; // 设置8位数据位
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG) ; // 禁用规范输入
options.c_oflag &= ~OPOST ; // 禁用输出处理
options.c_cc [VMIN] = 0 ; // 读取数据的最小字符数
options.c_cc [VTIME] = 100 ; // Ten seconds (100 deciseconds) 超时等待时间(十分之一秒100ms)
tcsetattr (fd, TCSANOW, &options) ; // 设置新的串口参数
ioctl (fd, TIOCMGET, &status); // 获取串口控制模式状态
status |= TIOCM_DTR ; // 设置 DTR(数据终端就绪)位
status |= TIOCM_RTS ; // 设置 RTS(请求发送)位
ioctl (fd, TIOCMSET, &status); // 设置串口控制模式状态
usleep (10000) ; // 暂停 10 毫秒
return fd ; // 返回串口文件描述符
}
void my_serialSendstring (const int fd, const unsigned char *s, int len)
{
int ret ;
ret = write (fd, s, len) ;
if (ret < 0)
printf ("Serial Sendstring Error\n") ;
}
int my_serialGetstring (const int fd, unsigned char *buffer)
{
int n_read ;
n_read = read (fd, buffer, 32) ;
return n_read ;
}
编译运行
编译
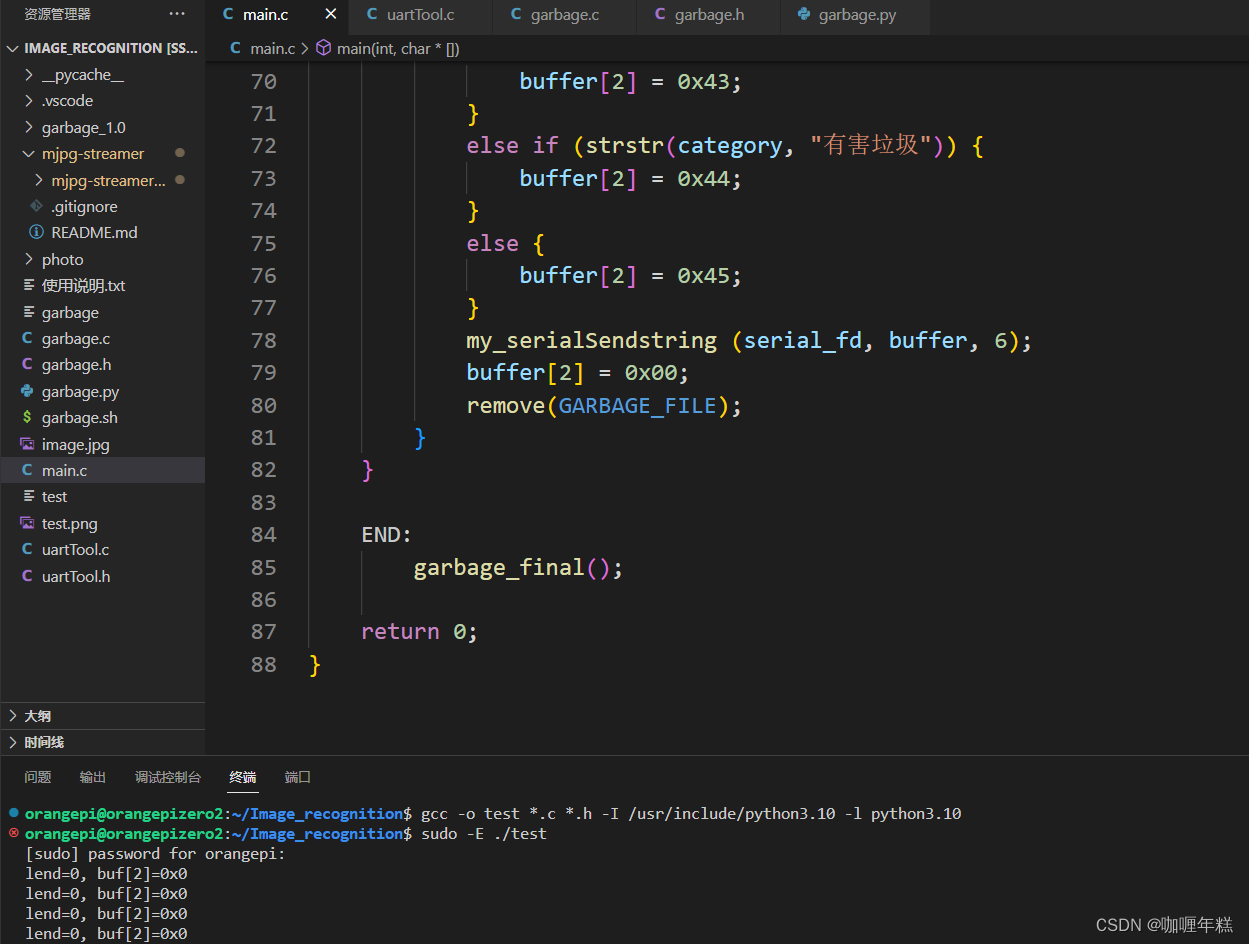
gcc -o test *.c *.h -I /usr/include/python3.10 -l python3.10
执行
sudo -E ./test
sudo -E 命令用于在以超级用户权限运行命令的同时,保留环境变量
查看进程
ps -ax | grep mjpg_streamer | grep -v grep
ps -ax | grep ./test | grep -v grep
ps aux | grep './test' | grep -v grep | awk '{print $2}'
杀死进程
kill -9 pid (-9——-SIGKILL)
写个shell脚本用于杀死运行的进程
当你运行程序时,shell脚本可以使用ps命令查找到特定进程的PID并使用kill命令杀死该进程。
以下是一个简单的Shell脚本示例,假设你的程序名为test:
#!/bin/bash
# 查找进程PID
PID=$(ps aux | grep './test' | grep -v grep | awk '{print $2}')
if [ -n "$PID" ]; then
# 杀死进程
kill -SIGKILL $PID
echo "Process ./test (PID $PID) killed."
else
echo "Process ./test not found."
fi
这个脚本中,ps aux命令获取当前所有进程的信息,grep './test'用于查找包含"./test"的进程,awk '{print $2}'用于提取PID。然后,脚本检查是否找到了进程,如果找到,就使用kill命令杀死进程,并输出相关信息。如果没有找到对应进程,输出相应的提示。
grep -v grep 是为了在使用 ps 命令结合 grep 进行进程查询时,排除掉 grep 进程本身。当你执行 ps aux | grep 'test' 时,该命令本身也会被匹配,因为它包含了关键字 'test'。为了排除掉这个匹配,使用 grep -v grep 来过滤掉含有 'grep' 字符串的行,从而得到准确的进程信息。
将这个脚本保存为kill_test.sh,并添加执行权限:
chmod +x kill_test.sh
然后可以通过运行./kill_test.sh来执行脚本。确保在运行脚本之前你的程序已经启动。