Pix2Pix
- Pix2Pix 介绍:使用条件 GAN 进行图像到图像的转换
- Pix2Pix 原理
- Pix2Pix 模型结构
- 生成器:Unet结构
- 判别器:PatchGAN
- 目标函数
- Pix2Pix 项目使用
Pix2Pix 介绍:使用条件 GAN 进行图像到图像的转换
Pix2Pix 论文:https://arxiv.org/abs/1611.07004
Pix2Pix 的性质是图像转换。
图像转换,指从一副图像到另一副图像的转换。
可以类比机器翻译,一种语言转换为另一种语言。
这个转换过程是通过建立一个模型,利用生成对抗网络(GANs)的算法,大量的成对图像数据,如简笔画和真实照片,将输入的简笔画转换成逼真的照片。

Pix2Pix 原理

输入x:简笔画
生成器G:处理简笔画,生成的模拟图
判别器D:
- 输入 {简笔画、生成图},判断为
fake - 输入 {简笔画、真实图},判断为
real
Pix2Pix 模型结构
生成器:Unet结构
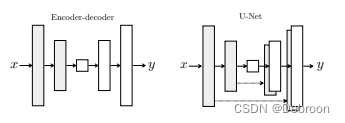
编码器:输入图像,输出特征
解码器:输入特征,输出图像
UNet:对编码-解码器改进的模型,主要是用于医学影像上。
在编码器和解码器之间增加了跳跃连接,使得同一级别的特征图可以在不同阶段进行拼接和融合。
假设我们有一个医学图像分割任务,输入是一张CT扫描图像,输出是图像中病变区域的分割结果。
解码器主要依赖于局部特征,例如像素的颜色、纹理等。
然而,对于复杂的图像分割任务来说,局部特征可能不足以准确地区分不同的区域。
UNet模型引入跳跃连接,关联到上下文信息、全局特征。
而全局特征可能包括图像中病变区域的大小、形状、位置等信息。
通过在解码器中引入跳跃连接,这些全局特征可以指导像素的分类,帮助模型更好地识别病变区域。
判别器:PatchGAN
PatchGAN是为了解决图像处理领域中的一类问题——如何有效地处理模糊和噪声——而提出的。
具体来说,它是为了解决在图像降质过程中产生的模糊和噪声问题,例如在拍照时由于光线不足、镜头移动等因素导致的图像模糊,或者在图像传输过程中引入的噪声等。
通过学习如何处理这些不良因素,PatchGAN能够让模糊的图像变得更加清晰,从而提高图像的质量。
假设你有一张照片,这张照片的某个部分被划出了一个小的正方形区域,而这个区域里面的内容被模糊处理了。
这个模糊处理的部分就叫做"Patch",而"PatchGAN"就是一种专门用来处理这样模糊图像的算法。
在PatchGAN训练判别器时,不是把整个图片直接放进判别器中进行判别,而是像下面这样,先把一幅图切成 N x N 的小块, 再把每个小块送入判别器中进行判别,最后把整体的结果取平均。
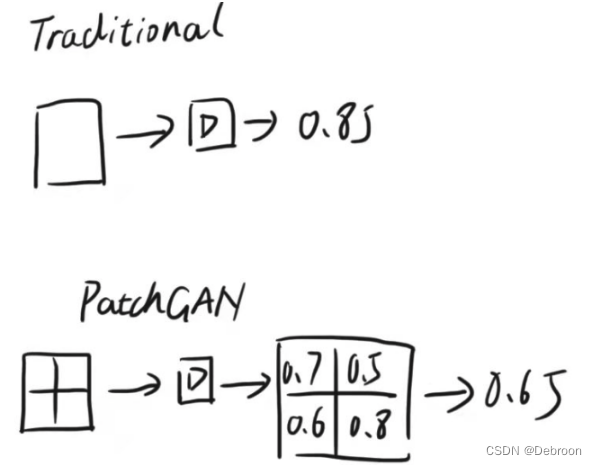
图片来源:CSDN@几维wk
这样划分的好处是,评估高频信息(细节)。
在原始的GAN中,判别器只会输出一个评价值,评价生成器生成的整幅图像。
但是PatchGAN的设计不同,它被设计成全卷积的形式。
这意味着,图像经过各种卷积层后,不会进入全连接层或激活函数,而是使用卷积将输入映射为一个 N*N 的矩阵。
这个矩阵就像原始GAN中的评价值,但它评价的是生成器生成的图像中的每一个小区域。
每个点(true或false)代表原始图像中的一小块区域的评价值,这就是“感受野”的应用。
使用 N*N 的矩阵来评价整幅图像,可以关注更多的区域,这就是PatchGAN的优势。
举例,假设我们有一个 64x64 的图像,我们的 PatchGAN 有 16 个 patch,每个 patch 是 8x8 的。这意味着我们的判别器会输出一个 16x16 的矩阵。每个元素值代表对应 patch 在真实图像中的存在概率。
例如,如果判别器判断第 1 行第 1 列的 patch 是真实的,那么矩阵的第 1 行第 1 列的值就会接近 1,而其他值则会接近 0。如果它判断第 2 行第 3 列的 patch 是生成的,那么矩阵的第 2 行第 3 列的值就会接近 0,而其他值则会接近 1。
通过这种方式,PatchGAN 能够关注到图像中的各个区域,而不仅仅是全局的图像。这对于生成图像的细节部分特别有用,因为往往细节部分更能决定一张图像的真实性。
目标函数
生成器优化目标: L c G A N ( G , D ) = E x , y [ log D ( x , y ) ] + E x , z [ log ( 1 − D ( x , G ( x , z ) ) ] \begin{aligned}\mathcal{L}_{cGAN}(G,D)=&\mathbb{E}_{x,y}[\log D(x,y)]+\\&\mathbb{E}_{x,z}[\log(1-D(x,G(x,z))]\end{aligned} LcGAN(G,D)=Ex,y[logD(x,y)]+Ex,z[log(1−D(x,G(x,z))]
-
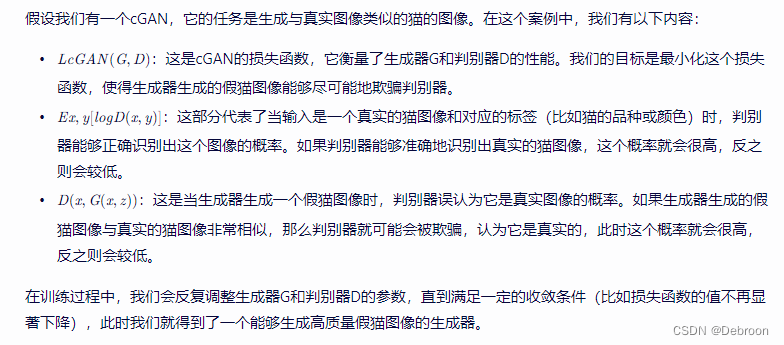
L c G A N ( G , D ) L cGAN (G,D) LcGAN(G,D):这是 cGAN 的损失函数,它关于生成器G和判别器D优化。损失函数的目标是最小化生成器生成的假样本被判别器识别的概率,同时最大化判别器正确识别真实样本的概率。
-
E x , y [ l o g D ( x , y ) ] Ex,y[logD(x,y)] Ex,y[logD(x,y)]:这部分是期望真实样本被判别器识别的概率。x是真实样本,y是对应的条件标签,D(x,y) 是判别器对于输入 (x,y) 判断为真实样本的概率。
-
E x , z [ l o g ( 1 − D ( x , G ( x , z ) ) ) ] Ex,z[log(1−D(x,G(x,z)))] Ex,z[log(1−D(x,G(x,z)))]:这部分是期望生成器生成的假样本被判别器识别的概率。x是真实样本,z是随机噪声,G(x,z)是生成器根据真实样本x和随机噪声z生成的假样本。
D ( x , G ( x , z ) ) D(x,G(x,z)) D(x,G(x,z)) 是判别器对于输入 ( x , G ( x , z ) ) (x,G(x,z)) (x,G(x,z)) 判断为真实样本的概率,因此我们需要最大化它的相反数,即 ( 1 − D ( x , G ( x , z ) ) ) (1−D(x,G(x,z))) (1−D(x,G(x,z)))。
通过最小化这个损失函数,cGAN可以训练出能够生成满足给定条件约束的样本的生成器。
举例:
传统的损失函数,如L2或L1损失,旨在最小化生成样本与真实样本之间的差异。这种差异度量方法在生成对抗网络(GAN)中同样重要,因为生成器不仅要能够欺骗判别器,还需要生成与真实数据相似度尽可能高的假样本。
当我们在GAN的目标函数中加入传统的损失时,生成器就需要在满足判别器的条件下,尽可能地接近真实样本。这使得生成器不仅要关注欺骗判别器,还要关注生成样本的质量。因此,这种结合可以产生更清晰、更逼真的假样本。
L2损失会最小化每个特征的平方差,因此生成的假样本可能会更加平滑,而无法捕捉到真实样本中的一些细节和变化。
相反,如果使用L1损失来优化生成器,我们可能会发现生成的假样本更加锐利和清晰。
这是因为L1损失会最小化每个特征的绝对差值,因此生成的假样本可能会更加突出真实样本中的一些边缘和细节。
所以,在GAN的目标函数中混入L1损失相比L2损失能够带来更好的效果。因为L1损失能够更好地捕捉到真实样本中的边缘和细节,从而产生更清晰、更逼真的假样本。

这个公式的目的是最小化生成模型G生成的假样本与真实样本之间的差异。具体来说,它计算了真实样本y与生成模型G生成的假样本G(x, z)之间的L1距离(即绝对值差异的总和)。
最终目标函数:

Pix2Pix 项目使用
Pix2Pix 本地部署:https://www.iotword.com/15549.html
Pix2Pix 项目代码:https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix
Pix2Pix 代码(国内下载链接,很快):https://gitcode.net/zhenzhidemaoyi/pytorch-CycleGAN-and-pix2pix
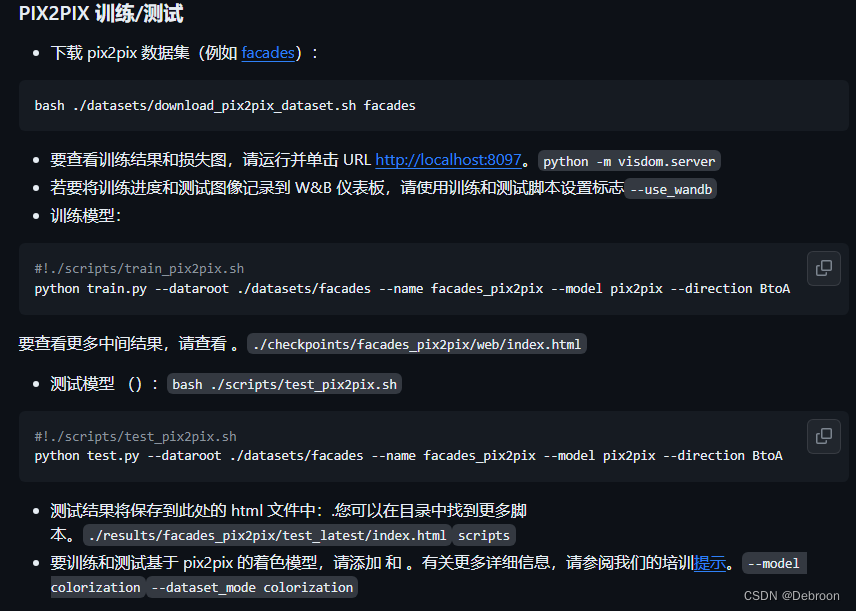
手把手教学使用链接:https://blog.csdn.net/qq_42691298/article/details/127460187
这篇写的太详细,手把手教学,我真没必要再写了。