效果:
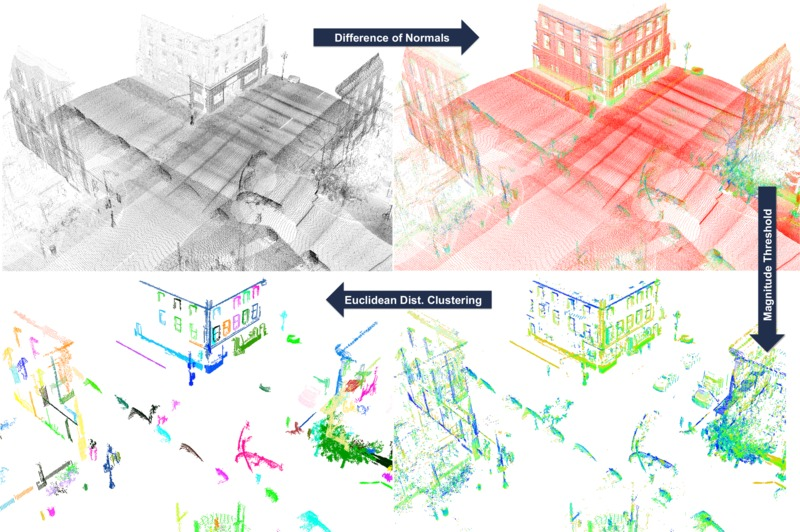
总体思路:
1、计算DoN特征
2、依据曲率进行过滤
3、依据欧式距离进行聚类
计算DoN特征的目的是为了提供准确的曲率信息。
其他:
计算DoN特征,这个算法是一种基于法线差异的尺度滤波器,用于点云数据。对于点云中的每个点,使用不同的搜索半径(sigma_s,sigma_l)估计两个法线,然后将这两个法线相减,得到一个基于尺度的特征。这个特征可以进一步用于过滤点云数据,类似于图像处理中的高斯差分(Difference of Gaussians)。但是,这个算法是在表面上进行的。当两个搜索半径相关时(sigma_l=10*sigma_s),可以获得最佳结果,两个搜索半径之间的频率可以被视为滤波器的带宽。对于适当的值和阈值,它可以用于表面边缘提取。
需要注意的是,输入的法线(通过setInputNormalsSmall和setInputNormalsLarge设置)必须与输入的点云(通过setInputCloud设置)相匹配。这与扩展FeatureFromNormals的特征估计方法的行为不同,后者将法线与搜索表面匹配。
这个算法的作者是Yani Ioannou,详细的介绍可以参考他的硕士论文《Automatic Urban Modelling using Mobile Urban LIDAR Data》。这个算法适用于点云数据的特征提取和滤波,特别适用于城市建模、环境感知和地理信息系统等领域。
代码:
/**
* @file don_segmentation.cpp
* Difference of Normals Example for PCL Segmentation Tutorials.
*
* @author Yani Ioannou
* @date 2012-09-24
*/
#include <string>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/search/organized.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/filters/conditional_removal.h>
#include <pcl/segmentation/extract_clusters.h>
#include <pcl/features/don.h>
using namespace pcl;
int main (int argc, char *argv[])
{
///The smallest scale to use in the DoN filter.
double scale1;
///The largest scale to use in the DoN filter.
double scale2;
///The minimum DoN magnitude to threshold by
double threshold;
//segment scene into clusters with given distance tolerance using euclidean clustering
double segradius;
if (argc < 6)
{
std::cerr << "usage: " << argv[0] << " inputfile smallscale largescale threshold segradius" << std::endl;
exit (EXIT_FAILURE);
}
/// the file to read from.
td::string infile = argv[1];
/// small scale
std::istringstream (argv[2]) >> scale1;
/// large scale
std::istringstream (argv[3]) >> scale2;
std::istringstream (argv[4]) >> threshold; // threshold for DoN magnitude
std::istringstream (argv[5]) >> segradius; // threshold for radius segmentation
// Load cloud in blob format
pcl::PCLPointCloud2 blob;
pcl::io::loadPCDFile (infile.c_str (), blob);
pcl::PointCloud<PointXYZRGB>::Ptr cloud (new pcl::PointCloud<PointXYZRGB>);
pcl::fromPCLPointCloud2 (blob, *cloud);
// Create a search tree, use KDTreee for non-organized data.
pcl::search::Search<PointXYZRGB>::Ptr tree;
if (cloud->isOrganized ())
{
tree.reset (new pcl::search::OrganizedNeighbor<PointXYZRGB> ());
}
else
{
tree.reset (new pcl::search::KdTree<PointXYZRGB> (false));
}
// Set the input pointcloud for the search tree
tree->setInputCloud (cloud);
if (scale1 >= scale2)
{
std::cerr << "Error: Large scale must be > small scale!" << std::endl;
exit (EXIT_FAILURE);
}
// Compute normals using both small and large scales at each point
pcl::NormalEstimationOMP<PointXYZRGB, PointNormal> ne;
ne.setInputCloud (cloud);
ne.setSearchMethod (tree);
/**
* NOTE: setting viewpoint is very important, so that we can ensure
* normals are all pointed in the same direction!
*/
ne.setViewPoint (std::numeric_limits<float>::max (), std::numeric_limits<float>::max (), std::numeric_limits<float>::max ());
// calculate normals with the small scale
std::cout << "Calculating normals for scale..." << scale1 << std::endl;
pcl::PointCloud<PointNormal>::Ptr normals_small_scale (new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch (scale1);
ne.compute (*normals_small_scale);
// calculate normals with the large scale
std::cout << "Calculating normals for scale..." << scale2 << std::endl;
pcl::PointCloud<PointNormal>::Ptr normals_large_scale (new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch (scale2);
ne.compute (*normals_large_scale);
// Create output cloud for DoN results
PointCloud<PointNormal>::Ptr doncloud (new pcl::PointCloud<PointNormal>);
copyPointCloud (*cloud, *doncloud);
std::cout << "Calculating DoN... " << std::endl;
// Create DoN operator
pcl::DifferenceOfNormalsEstimation<PointXYZRGB, PointNormal, PointNormal> don;
don.setInputCloud (cloud);
don.setNormalScaleLarge (normals_large_scale);
don.setNormalScaleSmall (normals_small_scale);
if (!don.initCompute ())
{
std::cerr << "Error: Could not initialize DoN feature operator" << std::endl;
exit (EXIT_FAILURE);
}
// Compute DoN
don.computeFeature (*doncloud);
// Save DoN features
pcl::PCDWriter writer;
writer.write<pcl::PointNormal> ("don.pcd", *doncloud, false);
// Filter by magnitude
std::cout << "Filtering out DoN mag <= " << threshold << "..." << std::endl;
// Build the condition for filtering
pcl::ConditionOr<PointNormal>::Ptr range_cond (
new pcl::ConditionOr<PointNormal> ()
);
range_cond->addComparison (pcl::FieldComparison<PointNormal>::ConstPtr (
new pcl::FieldComparison<PointNormal> ("curvature", pcl::ComparisonOps::GT, threshold))
);
// Build the filter
pcl::ConditionalRemoval<PointNormal> condrem;
condrem.setCondition (range_cond);
condrem.setInputCloud (doncloud);
pcl::PointCloud<PointNormal>::Ptr doncloud_filtered (new pcl::PointCloud<PointNormal>);
// Apply filter
condrem.filter (*doncloud_filtered);
doncloud = doncloud_filtered;
// Save filtered output
std::cout << "Filtered Pointcloud: " << doncloud->size () << " data points." << std::endl;
writer.write<pcl::PointNormal> ("don_filtered.pcd", *doncloud, false);
// Filter by magnitude
std::cout << "Clustering using EuclideanClusterExtraction with tolerance <= " << segradius << "..." << std::endl;
pcl::search::KdTree<PointNormal>::Ptr segtree (new pcl::search::KdTree<PointNormal>);
segtree->setInputCloud (doncloud);
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction<PointNormal> ec;
ec.setClusterTolerance (segradius);
ec.setMinClusterSize (50);
ec.setMaxClusterSize (100000);
ec.setSearchMethod (segtree);
ec.setInputCloud (doncloud);
ec.extract (cluster_indices);
int j = 0;
for (const auto& cluster : cluster_indices)
{
pcl::PointCloud<PointNormal>::Ptr cloud_cluster_don (new pcl::PointCloud<PointNormal>);
for (const auto& idx : cluster.indices)
{
cloud_cluster_don->points.push_back ((*doncloud)[idx]);
}
cloud_cluster_don->width = cloud_cluster_don->size ();
cloud_cluster_don->height = 1;
cloud_cluster_don->is_dense = true;
//Save cluster
std::cout << "PointCloud representing the Cluster: " << cloud_cluster_don->size () << " data points." << std::endl;
std::stringstream ss;
ss << "don_cluster_" << j << ".pcd";
writer.write<pcl::PointNormal> (ss.str (), *cloud_cluster_don, false);
++j;
}
}