- 增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等;
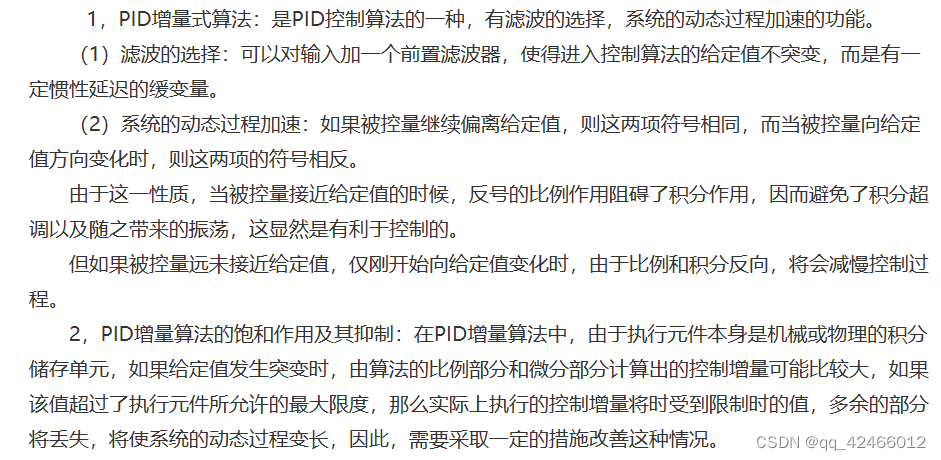
- 在PID增量算法中,执行元件本身是机械或物理的积分储存单元;
- 对输入加一个前置滤波器,使得进入控制算法的给定值不突变,而是有一定惯性延迟的缓变量(即做斜率限制):叫做前置滤波;
- 也许下面图中的第2点解释了积分截断效应?
第四十篇,杂记(四)
news2026/2/13 16:46:50
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1238536.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

ADManager Plus:全能Active Directory管理的得力助手
一、简介
ADManager Plus是一款功能强大的Active Directory(AD)管理工具,为企业提供了全面、高效的AD管理解决方案。它不仅简化了AD管理的复杂性,还提高了管理员的工作效率。作为一款综合性的工具,ADManager Plus涵盖…
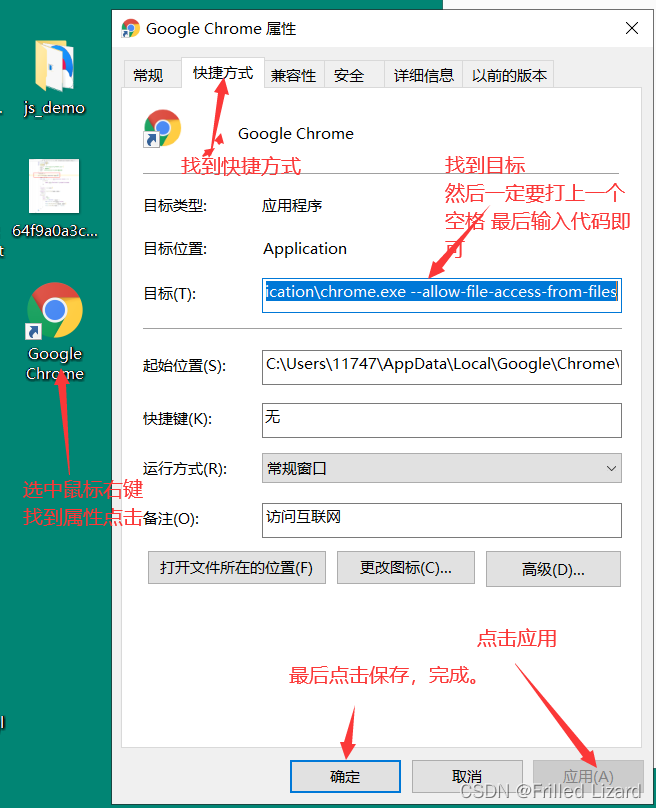
js读取json文件
1. 原生的两种方法
1.1 XMLHttpRequest
const xhr new XMLHttpRequest();
xhr.overrideMimeType("application/json");
xhr.open(GET, data.json, true);
xhr.onreadystatechange function () {if (xhr.readyState 4 && xhr.status 200) {const data …
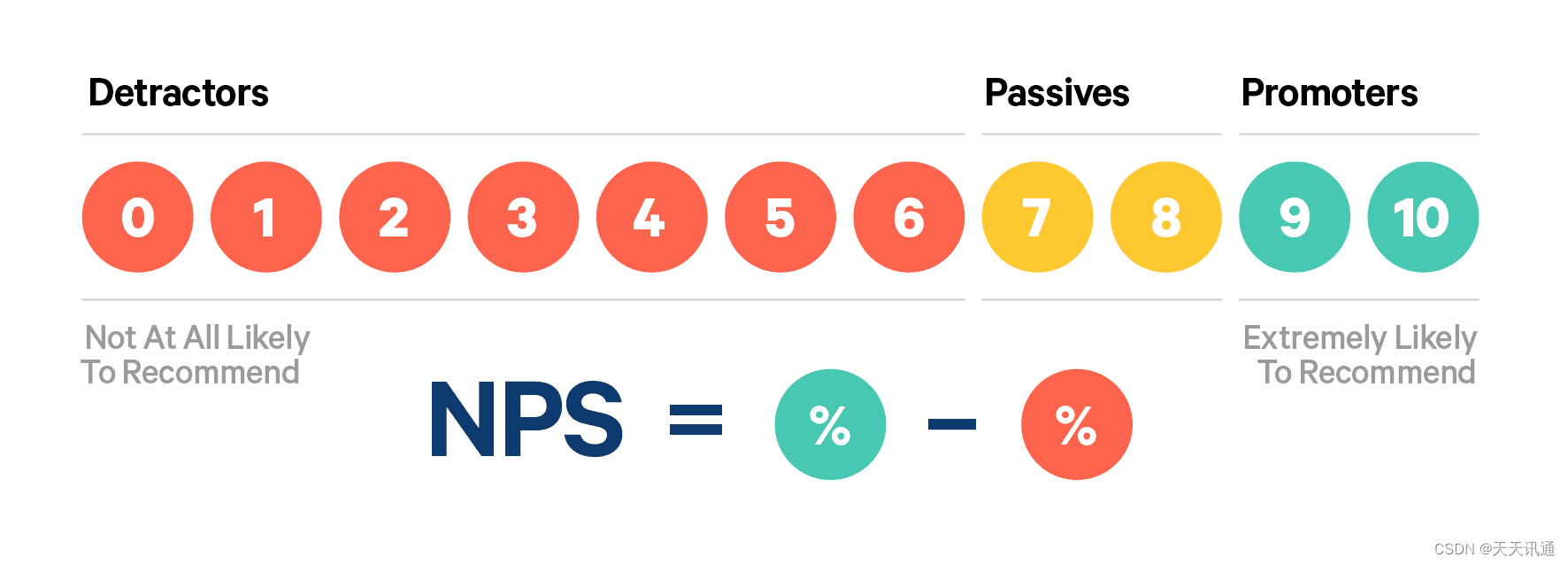
如何判断客户对你是不是真的满意
我们平时生活中打个滴滴、叫个外卖,都会让做星级评价,就算去银行办业务,也会让按个按钮,对窗口的服务做个评价…… 再问一个问题:客户满意了,您的生意就一定好吗? 一、满意度:质量监…
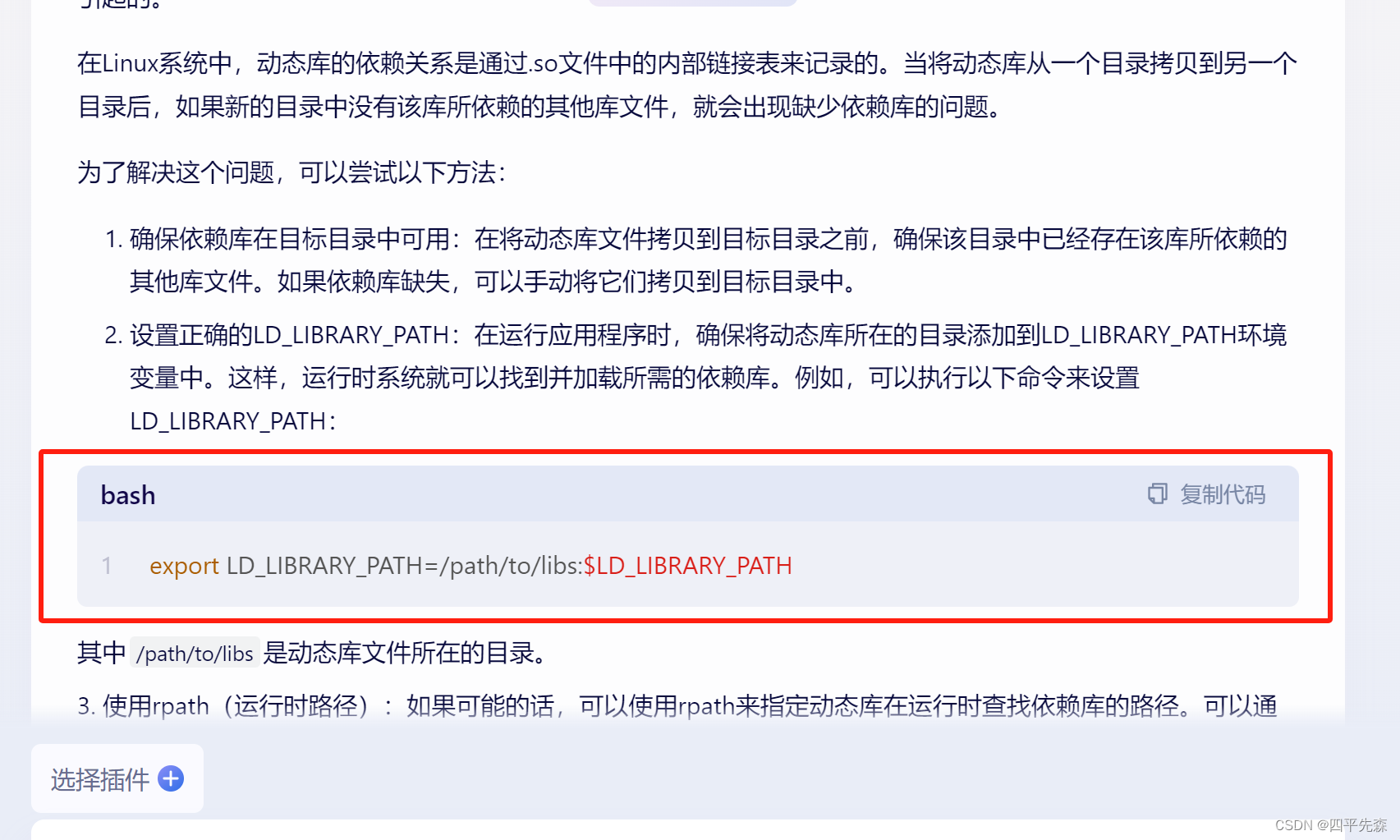
CmakeLists编译的动态库.so移动到其他位置后,提示找不到该库的依赖库解决办法
主要问题: 最近在搞海康SDK调用相机,发现在linux下一直调用不起来相机,总是提示error code:29,注册失败,重新编译优惠存在找不到依赖库的问题。
1.异常
CmakeLists编译的动态库.so移动到其他位置后&#…
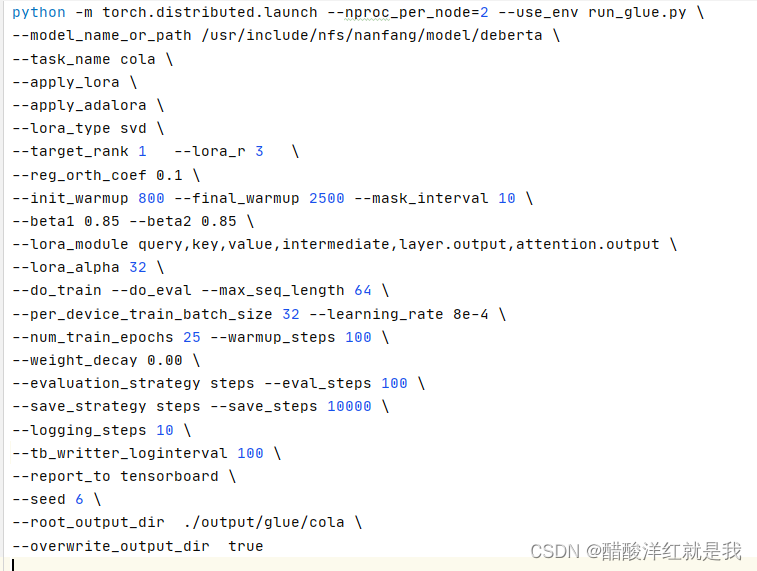
运行代码时不同软件的参数写法
目录 pycharm终端 pycharm
如下图所示,不同参数间不需要什么间隔什么东西
终端
如下图所示,不同参数间需要用一个符号来间隔
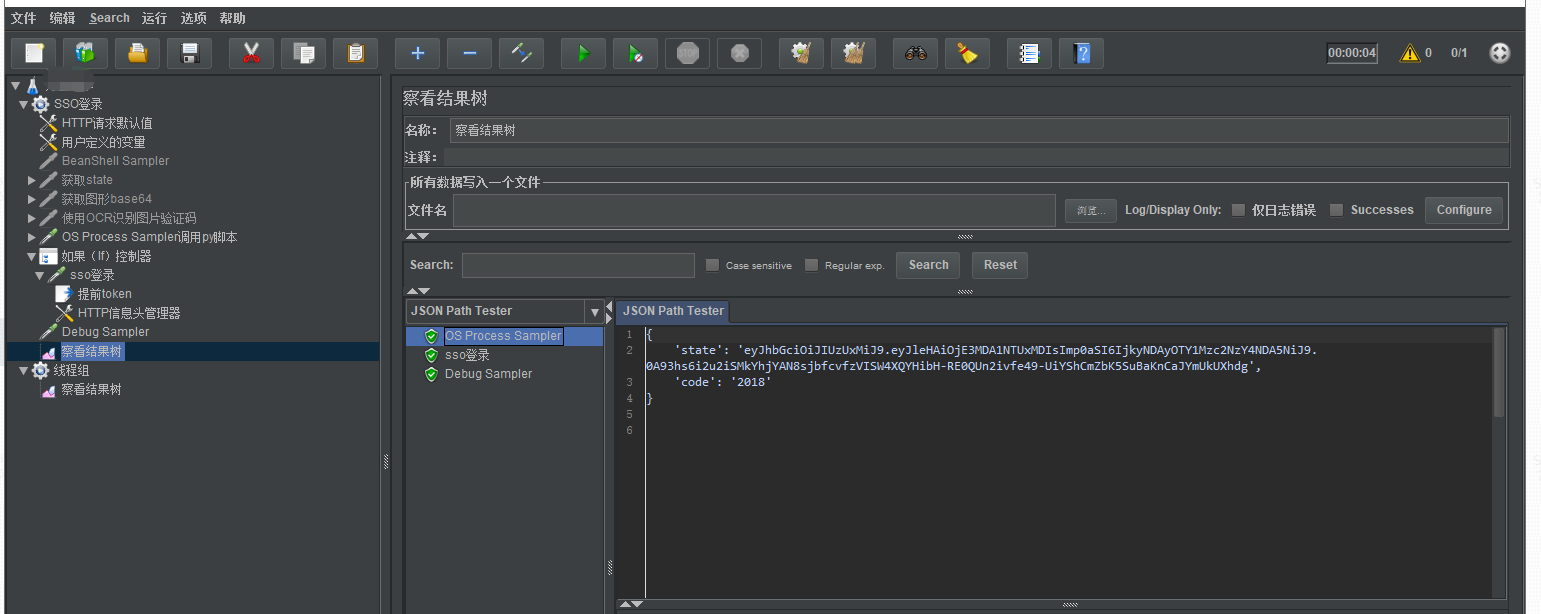
jmeter中调用python代码
1、安装pyinstaller pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pyinstaller 2、将py脚本打包 pyinstaller -F venv/get_image/OCR_jmeter_api.py 3、jmeter中添加OS Process Sampler并调用dist下的程序 4、执行jmeter
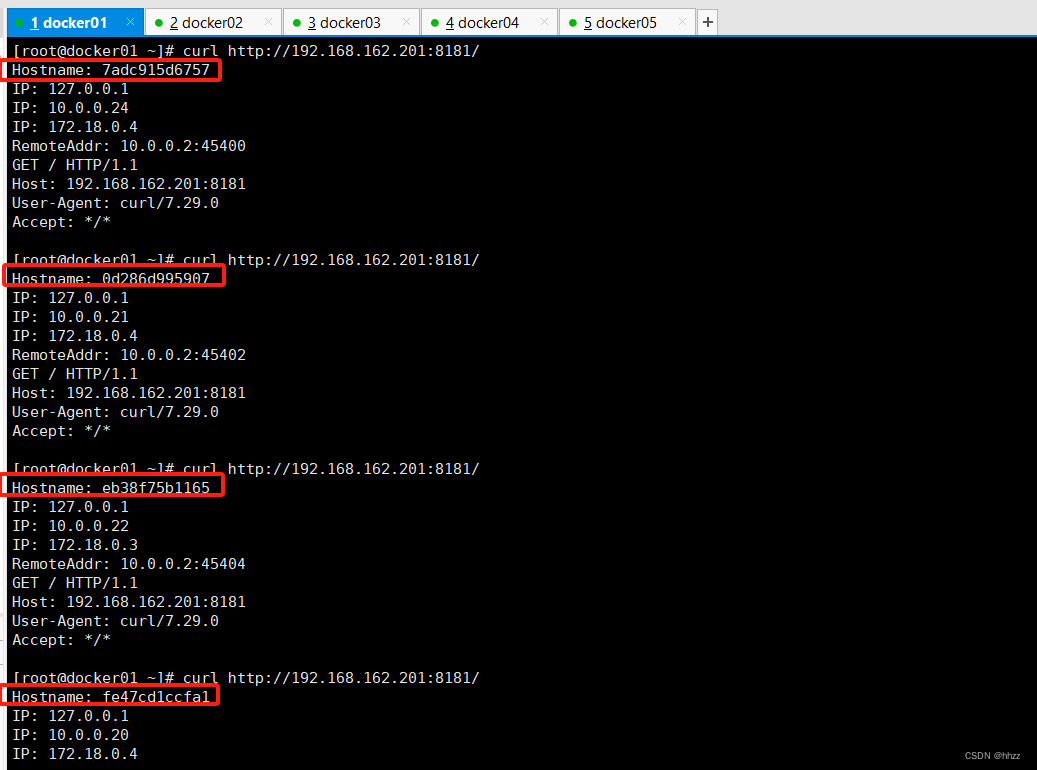
Docker Swarm总结(1/2)
目录
1、swarm 理论基础
1.1 简介
1.2 节点架构
1.3 服务架构
1.4 服务部署模式
2、swarm 集群搭建
2.1 需求
2.2 克隆主机
2.3 启动5个docker宿主机
2.4 查看 swarm 激活状态 2.5 关闭防火墙
2.6 swarm 初始化
2.7 添加 worker 节点
2.8 添加 manager 节点
3、…

vr编辑器可以解决教育教学中的哪些问题
VR编辑器是一种基于虚拟现实技术的教育内容编辑器,可以帮助教师快速创建出高质量的虚拟现实教学内容。 比如在畜牧教学类,通过这个软件,教师可以将真实的动物场景、行为和特征模拟到虚拟现实环境中,让学生在沉浸式的体验中学习动物…

【操作系统】I/O软件层次结构
文章目录 1. 前言2. I/O软件层次结构2.1 用户层软件2.2 设备独立性软件2.3 设备驱动程序2.4 中断处理程序 1. 前言
偶然看到“程序员的护城河是什么”这个话题,作为一个工作两年多的程序员吧,经常看到网上关于各种35岁危机、裁员甚至猝死之云云。最近也…

PostgreSQL导出表结构带注释
我们在平时开发过程中,经常会在字段的注释中,加上中文,解释字段的相关含义,也可以避免时间太久忘记这个字段代表什么,毕竟英文水平不好。我们可能要经常整理数据库表结构,提供他人去收集数据,但…

智能监控如何最大化保障生产工人权益,助力电焊车间智能化?
电焊车间加装监控可以加强对电焊车间的生产过程监控,保障员工的生产工作安全,提高工作效率,降低生产成本。但是传统的监控只能单一的去“看”,并不能最大化发挥视频监控的作用,而智能视频监控就不一样。它可以有效提高…
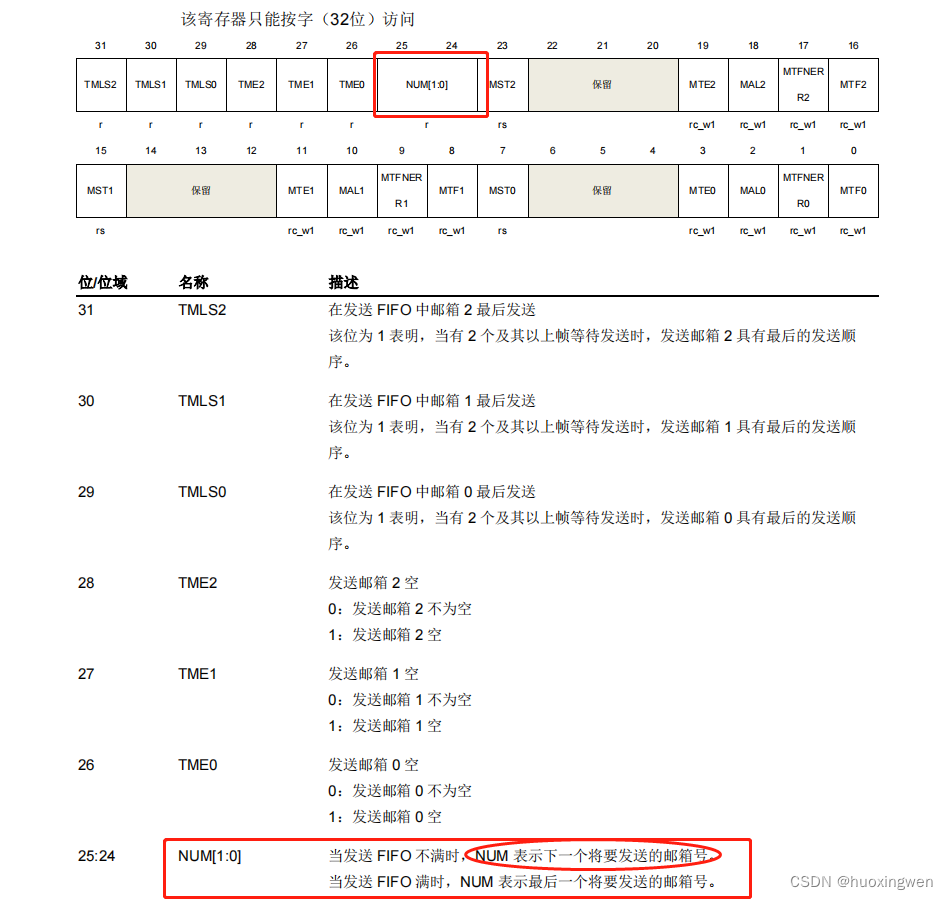
GD32替换STM32使用HAL库开发问题
GD32HAL库开发问题 1can初始化进入error handle2发送邮箱不能按照填写顺序发送3 GD32修改代码被stm32cudemx覆盖问题 1can初始化进入error handle
HAL库的HAL_CAN_Init中,hcan->Instance->MSR寄存器无法清零,STM32先清零,再退出睡眠模…

YOLOv5 分类模型 OpenCV和PyTorch两者实现预处理的差异
YOLOv5 分类模型 OpenCV和PyTorch两者实现预处理的差异
flyfish
PyTorch封装了PIL库 简单对比下两者的使用方法
import cv2
from PIL import Image
import numpy as npfull_path_file_name"/media/a//ILSVRC2012_val_00001244.JPEG"#OpenCV读取图像默认是BGR顺序
…
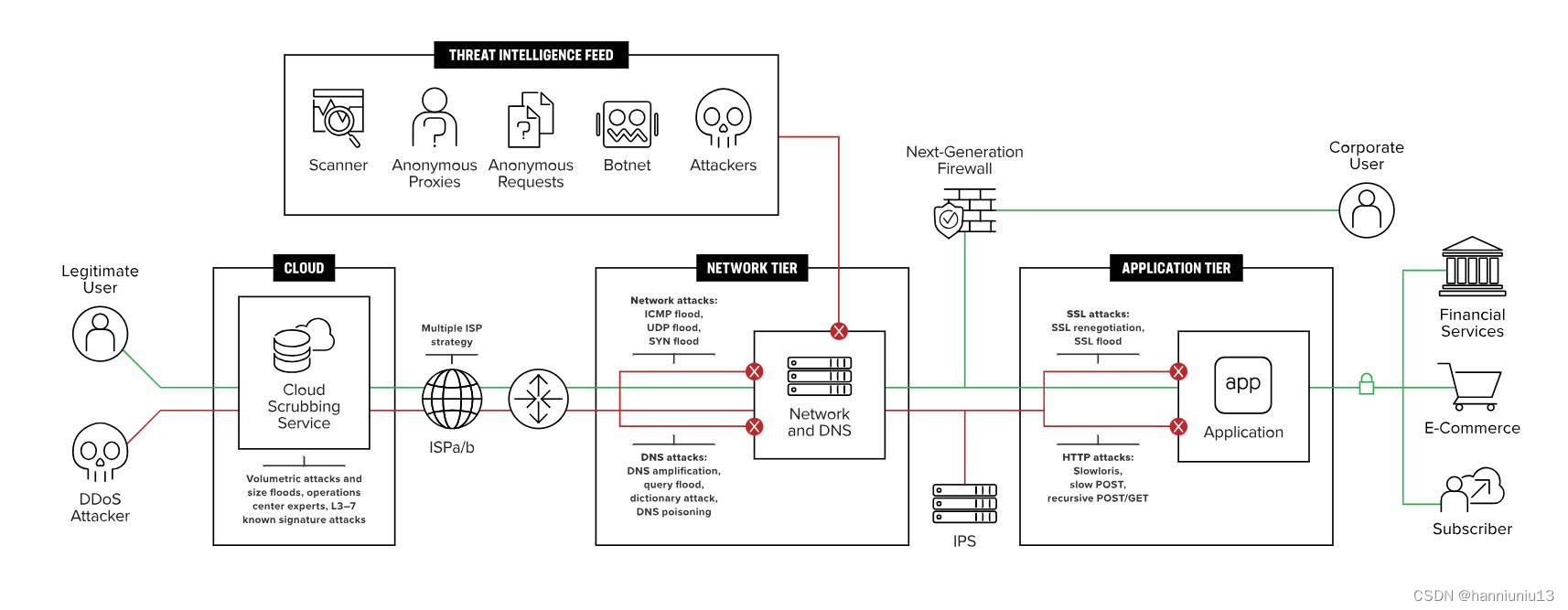
防止恶意攻击,服务器DDoS防御软件科普
作为一种恶意的攻击方式,DDoS攻击正以超出服务器承受能力的流量淹没网站,让网站变得不可用。近几年,这种攻击持续增多,由此优秀服务器DDoS防御软件的需求也随之增长。那么如何选择服务器DDoS防御软件,从根本上根除DDoS…

美国云服务器:CN2/纯国际/高防线路介绍
谈到国外云服务器,美国云服务器必有一席之地。但是,一般来说使用美国云服务器,线路质量是一个重要的考虑因素。如果线路选择不合理,就有可能造成速度减慢或者安全隐患问题产生。本文将介绍美国云服务器的CN2/纯国际/高防三种…
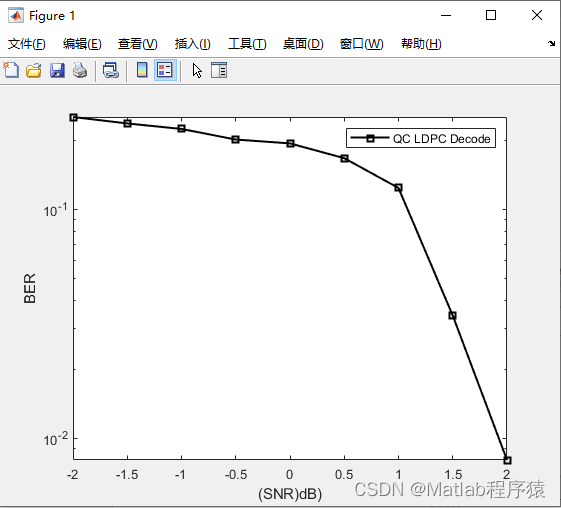
【MATLAB源码-第86期】基于matlab的QC-LDPC码性能仿真,输出误码率曲线。
操作环境:
MATLAB 2022a
1、算法描述
QC-LDPC(准循环低密度奇偶校验)编码是一种高效的错误校正编码方式,广泛应用于通信系统和数据存储中以提高数据的可靠性。它是低密度奇偶校验(LDPC)编码的一种特殊形…
【计算机方向】通信、算法、自动化、机器人、电子电气、计算机工程、控制工程、计算机视觉~~~~~合集!!!
◆本文为大家梳理了近期可投的EI国际会议,涵盖计算机各个学科方向,均可EI检索
本期EI会议汇总合集涵盖领域:计算机视觉、物联网、算法、通信、智能技术、人工智能、人机交互、机器人、电子电气等众多领域!
本期所推荐的EI会议有…


AIGC前沿技术与数字创新应用合作交流和论坛发布活动圆满落幕
2023年11月17日下午,AIGC前沿技术与数字创新应用合作交流和论坛发布活动在北京市海淀区牡丹科技楼B座B1报告厅成功举办。 在这个以技术为驱动力的时代,AIGC等这些前沿技术正以惊人的速度改变着我们的生活和产业格局。利用新兴技术和数字化工具来解决问题…
![CNVD-2023-12632:泛微E-cology9 browserjsp SQL注入漏洞复现 [附POC]](https://img-blog.csdnimg.cn/6b6152d8d9634b3e9e29f8fdddf0f804.png)
CNVD-2023-12632:泛微E-cology9 browserjsp SQL注入漏洞复现 [附POC]
文章目录 泛微E-cology9 browserjsp SQL注入漏洞(CNVD-2023-12632)漏洞复现 [附POC]0x01 前言0x02 漏洞描述0x03 影响版本0x04 漏洞环境0x05 漏洞复现1.访问漏洞环境2.构造POC3.复现 0x06 修复建议 泛微E-cology9 browserjsp SQL注入漏洞(CNVD-2023-12632)漏洞复现 [附POC]
0x…