1、概述
我们在前面介绍的ROS,都是ROS1的版本,近期对机器狗进行学习的时候,发现版本是ROS2了,也发现平时习惯的一些命令都有了变化,改变还是挺大的,不过熟悉之后还是很习惯ROS2的写法。
ROS2不是在ROS1的基础上做的更新,而是重新构建的,这样避免ROS1的设计的很多不规范,尤其是在实时性,安全性等方面都满足不了现代工作的需求,而做一些底层修改又可能造成ROS1的不稳定,所以算是全新架构了。底层是用C语言编写,叫做RCL库(ROS客户端库Client Library,是一种API,提供ROS话题、服务、动作、参数等接口),在写上层程序中调用的rclcpp和rclpy是在RCL库上进行一次包装,这样带来的好处是让C++(默认使用cpp 11, cpp1A4,cpp17标准,比ROS1默认使用的cpp98标准更加现代化的)和Python(这里放弃了Python2,直接使用的是Python3)程序调用API更加统一相似,同时对ROS2进行功能更新时,直接更新RCL库,再新增C++和Python的支持。
虽然launch启动文件还是支持,不过在ROS2中建议使用Python文件写launch文件,更加的灵活。
2、历史版本
我们先来看下ROS1有哪些历史版本:
Ubuntu版本 ros版本
Ubuntu 20.04 noetic
Ubuntu18.04 melodic
Ubuntu16.04 kinetic
Ubuntu14.04 indigo
这个跟Ubuntu的版本对应着,到了ROS2的时候,基本每年都有新的版本发布,ROS2的历史版本列表:
Crystal: 2018年12月
Dashing: 2019年5月
Eloquent: 2019年11月
Foxy: 2020年6月
Galactic: 2021年5月
本人的Ubuntu版本信息:lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.4 LTS
Release: 20.04
Codename: focal
其余命令还有:cat /etc/issue 或者cat /etc/os-release或者cat /proc/version
比如本人的ROS2版本:rosversion -d
foxy
或者:rosversion --distro
foxy
3、命令变化
命令也改变了,基本是将ros1中的rosxxx拆分成了ros2 xxx的形式,比如 rosrun 变成了 ros2 run,当然我们可以通过双击tab键来看提示是最好的,这个也是多次推荐的做法,如下图:
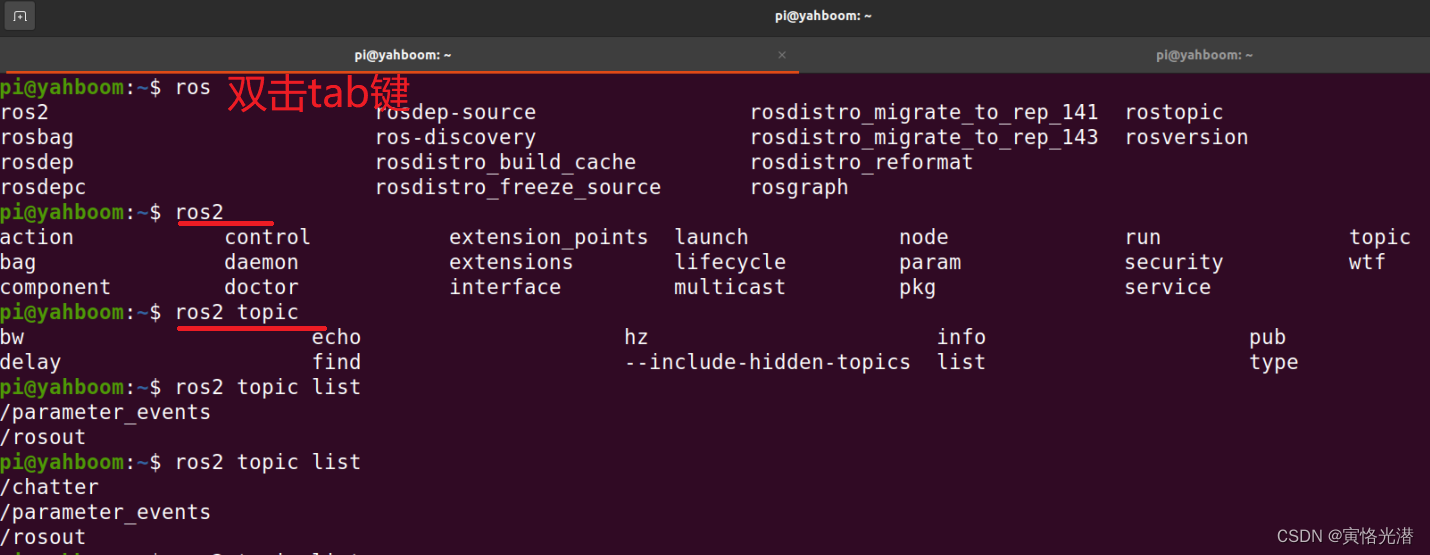
可以看到这样的命令,个人感觉更合理了,每个单词都有其实际意义了,更加直观。
我们来运行一个节点Demo看下效果,一个发布节点和一个订阅节点:
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener截图如下:

这里运行上述两个节点之前,我并没有运行roscore,可以看到两个节点可以互相进行通信了,也就是说ROS2的去中心化设计让其适应更多工业应用和产品级应用场景的需求。
ROS1和ROS2可以并存于同⼀台电脑,你只需要source其对应的setup.bash即可完成环境的选择。
其余一些常见命令的变化如下:
编译指令,从 catkin_make 更改为 colcon build
rosrun rqt_graph rqt_graph 更改为 rqt_graph
rosrun rqt_tf_tree rqt_tf_tree 更改为 ros2 run tf2_tools view_frames.py
rviz 更改为 rviz2
4、全新安装
本人安装环境:lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 18.04.6 LTS
Release: 18.04
Codename: bionic
前面铺垫了一些ROS1到ROS2的部分变化,接下来我们来安装一个全新的ROS2,这样就会更加快速的熟悉它。
4.1、安装ROS2
首先更新软件库
sudo apt update
sudo apt upgrade安装ROS2,推荐安装完整版
sudo apt install ros-foxy-desktop如果不想安装完整版本,可以只安装核心软件包:sudo apt install ros-foxy-ros-base
不出意外的出了意外,报错如下:
E: Unable to locate package ros-foxy-desktop
所以需要指定软件安装源来安装:
sudo apt update && sudo apt install curl gnupg2 lsb-release
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'这里可以写死也可以获取变量值的写法:
dpkg --print-architecture ,本机:amd64
lsb_release -c 可以给出自身的版本,本机: Codename: bionic
写入之后,我们查看下源内容:cat /etc/apt/sources.list.d/ros2-latest.list
deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu bionic main
然后再次更新:sudo apt update
这里的Ubuntu18版本好像不能安装foxy?网上却很多安装成功的?这个暂时存疑,因为我也觉得这个ROS2应该跟Ubuntu版本没有对应关系了,那我们安装Dashing来体验下:
sudo apt install ros-dashing-desktop安装好了之后,配置环境,追加到 ~/.bashrc,这样不需要每次source
echo "source /opt/ros/dashing/setup.bash" >> ~/.bashrc由于本人在之前也安装了ROS1,所以我们在这里可以写一个判断,~/.bashrc文件追加如下内容:
echo "ROS melodic (1) or ROS2 dashing (2)?"
read edition
if [ "$edition" -eq "1" ];then
source /opt/ros/melodic/setup.bash
echo using ros melodic
else
source /opt/ros/dashing/setup.bash
echo using ros2 dashing
fi这样就会在开启终端时,选择ROS1还是ROS2,输入1表示启动ROS1,输入2表示启动ROS2
如果启动ROS2时,出现下面警告:
ROS_DISTRO was set to 'melodic' before. Please make sure that the environment does not mix paths from different distributions.
翻译过来是,之前将ROS_DISTRO设置为“melodic”。请确保环境没有混合来自不同发行版的路径。
就将.bashrc里面的/opt/ros/melodic/setup.bash注释掉即可。
如果双击tab键没有给出提示,需安装命令补全包:sudo apt install python3-argcomplete
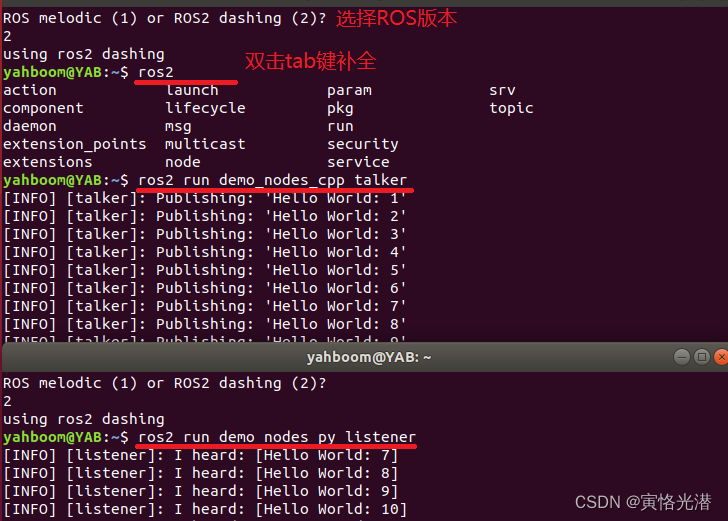
然后测试下,分别输入:
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listenerROS2安装之后测试没问题,如下图:
 一些常见的开发需要的包,自行按需选择安装:
一些常见的开发需要的包,自行按需选择安装:
sudo apt install ros-dashing-turtlesim
sudo apt install ros-dashing-xacro
sudo apt install python3-pip
sudo apt install python3-colcon-common-extensions
sudo apt install python3-vcstool
sudo apt-get install ros-dashing-joint-state-publisher-gui
#卸载ROS2
sudo apt remove ros-dashing-* && sudo apt autoremove4.2、安装Gazebo
Gazebo是一个强大的仿真平台,平时用的比较多,安装如下:
sudo apt install ros-dashing-gazebo-ros-pkgs导航相关的包
sudo apt install ros-dashing-cartographer
sudo apt install ros-dashing-cartographer-ros
sudo apt install ros-dashing-navigation2
sudo apt install ros-dashing-nav2-bringup
sudo apt install ros-dashing-gazebo-ros2-control
sudo apt install ros-dashing-ros2-control ros-dashing-ros2-controllers4.3、编译
编译的过程相比ROS1,在ROS2中也发生了很大的改变,未来随着ROS1的慢慢淘汰,我们还是重点掌握ROS2的用法即可
创建工作空间
mkdir -p ~/myRobotDog_ws/src
cd ~/myRobotDog_ws/src创建包(这里跟ROS1不一样)
ros2 pkg create --build-type ament_cmake mypkg --node-name mynode同样会在mypkg这个包下面,生成以下目录与文件
CMakeLists.txt include package.xml src
然后我们来看下节点mynode,在src里的一个c++文件:gedit mynode.cpp
#include <cstdio>
int main(int argc, char ** argv)
{
(void) argc;
(void) argv;
printf("hello world mypkg package\n");
return 0;
}接下来就是编译,在编译之前确保已安装colcon编译器
sudo apt install python3-colcon-common-extensionscd ~/myRobotDog_ws
colcon build --symlink-install
echo 'source ~/myRobotDog_ws/install/setup.bash' >> ~/.bashrc然后测试下
ros2 run mypkg mynode
#hello world mypkg package如果想增加节点,修改CMakeLists.txt文件即可:
cd ~/myRobotDog_ws/src/mypkg
gedit CMakeLists.txt新增即可:
add_executable(mynode src/mynode.cpp)
target_include_directories(mynode PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
install(TARGETS mynode
DESTINATION lib/${PROJECT_NAME})colcon的一些常用参数:
--symlink-install:使用符号链接比如,动态链接库,会在install目录中使用符号链接,指向build目录下生成的库文件(如 *.so),如果没有该选项,则两个目录都有该库文件。
--packages-select:只编译指定包,比如单独编译mypkg包:colcon build --packages-select mypkg
--packages-ignore: 忽略指定包,用法同上
--continue-on-error:编译出错继续编译其他模块
--cmake-args ,--ament-cmake-args, --catkin-cmake-args :传递参数给对应的package
最后需要注意的,ROS2在修改完任何文件后,需要重新编译 colcon build
更多详情可以查阅:https://docs.ros.org/en/dashing/Installation/Ubuntu-Install-Debians.html
5、编译Python
对于Python的编译,有好几个点需要注意,以及一些配置文件的修改
mkdir -p ~/mypy_ws/src
cd ~/mypy_ws/src
ros2 pkg create --build-type ament_python my_py
cd ~/mypy_ws/src/my_py/my_py
touch PYNode.py
gedit PYNode.py#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
def main(args=None):
rclpy.init(args=args)
node = Node("ChyiChin_Node")
node.get_logger().info("Python TEST")
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()加个可执行权限:chmod +x PYNode.py
cd ~/mypy_ws
colcon build --packages-select my_py
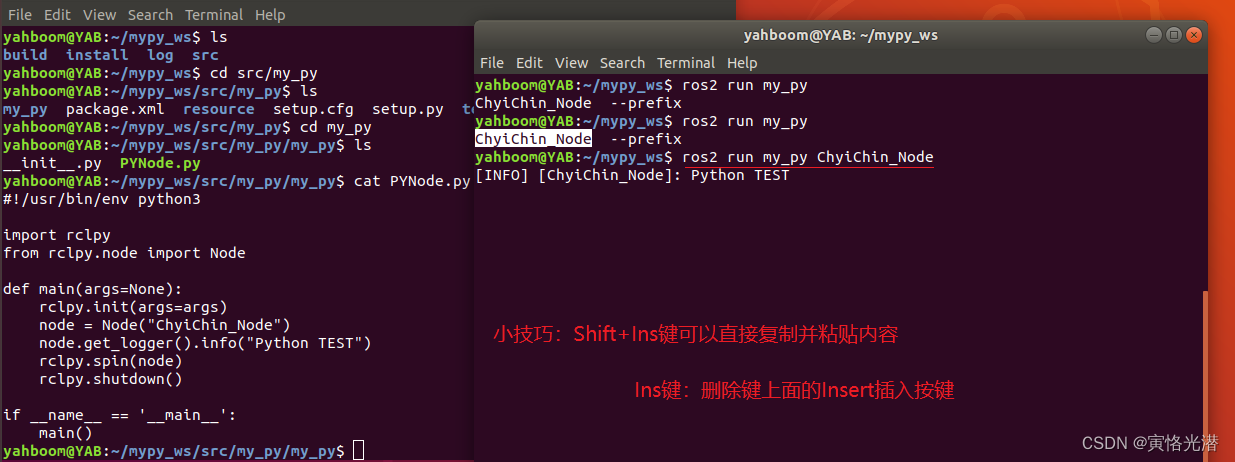
source install/setup.bash运行ChyiChin_Node节点,看下能否正确输出日志信息:
ros2 run my_py ChyiChin_Node
[INFO] [ChyiChin_Node]: Python TESTOK,没有问题,对C++和Python的编译就这么愉快的搞定了。接下来,将贴出在编译过程中遇到的一些错误,以及处理的方法
6、编译出错
6.1、setup.cfg
Usage of dash-separated 'script-dir' will not be supported in future version
短横线在未来版本不再支持,所以我们需要修改为下划线的形式:
cd ~/mypy_ws/src/my_py
gedit setup.cfg将里面的script-dir和install-scripts修改为script_dir和install_scripts
6.2、Setuptools版本
SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools.
setuptools.SetuptoolsDeprecationWarning,
查看下setuptools的版本
python3
import setuptools
print(setuptools.__version__)
59.6.0版本太新了,安装低版本的就可以了:
pip3 install setuptools==58.2.0 -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com6.3、No executable found
ros2在运行python文件时,会报错:No executable found
在前面的mypkg包里面,可以查询到所有可执行程序:ros2 pkg executables mypkg
mypkg mynode
mypkg mynode1
然后在Python里面的my_py包,查询是空的:ros2 pkg executables my_py
解决方案:在编译之前,需要修改setup.py,告知入口点位置,也就是Python文件的路径
cd ~/mypy_ws/src/my_py
gedit setup.py
entry_points={
'console_scripts': ["ChyiChin_Node=my_py.PYNode:main"],
},其中ChyiChin_Node为节点名称,my_py.PYNode为Python文件路径(包名.文件名),加:main入口函数
6.4、RuntimeError
RuntimeError: 'distutils.core.setup()' was never called -- perhaps 'setup.py' is not a Distutils setup script?
翻译过来是:RuntimeError: ' Distutils .core.setup()'从未被调用-也许'setup.py'不是Distutils安装脚本?
这个属于运行时错误,所以需要一个rclpy的依赖,所以在创建包的时候,这样写即可:
ros2 pkg create my_py --build-type ament_python --dependencies rclpy
最后来看下运行Python写的这个节点
ros2 run my_pkg ChyiChin_Node截图如下:
7、小结
ROS2的出现,让ROS真正成为了去中心化的分布式的操作系统,这个是其最主要的特点,因为在ROS1中,我们知道需要首先启动roscore,也就是MASTER管理节点,如果这个节点崩了,那整个ROS系统都崩了,这是一种不好的设计。
另外引入了数据分发服务通信协议(DDS),使用零拷贝的方式来传递消息,这大大节省了内存和传输所占用的资源,提高了通信的实时性。