文章目录
- 1. 循环对称问题的提出
- 2. 循环对称条件
- 2.1 节点位移的循环对称关系
- 2.2 节点内力的循环对称关系
- 3. 在平衡方程中引入循环对称条件
1. 循环对称问题的提出
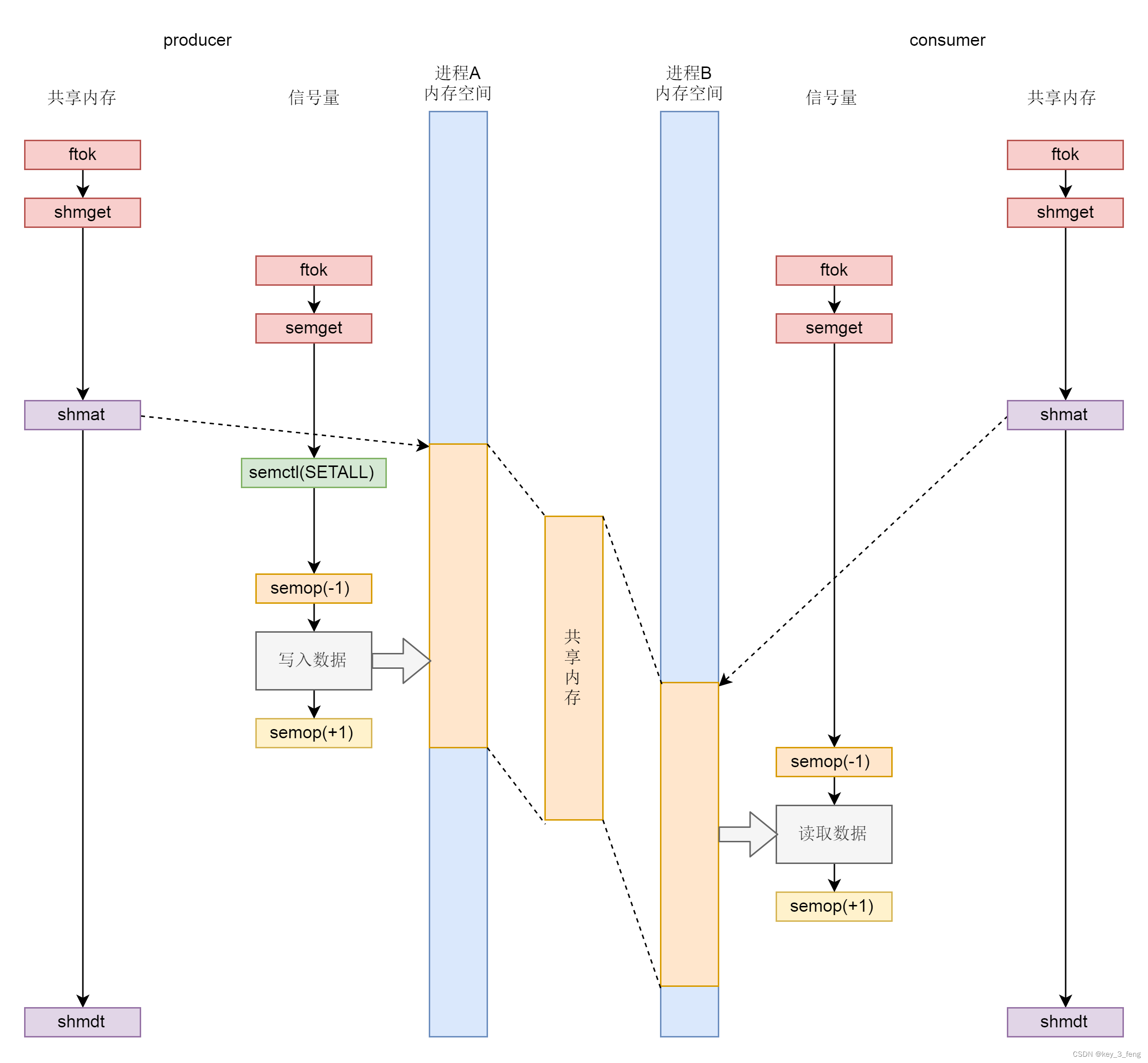
许多工程结构都是其中某一扇面的n次周向重复,也就是是周期循环对称结构。如果弹性体的几何形状、约束情况以及所受的外部载荷都是对称于某一轴,则所有的应力、应变和位移也就对称于对称轴,那么这就是循环对称问题。典型的有发动机轮盘受离心力载荷下的应力分析,轮盘结构如下图1所示。观察轮盘结构,不难发现轮盘是扇形段重复多次的结构,那么离心力是周期循环对称的,并假设轮盘温度场是沿周向均布的,那么轮盘的应力应变应该也是周期循环对称的。

对于循环对称问题,事实上可以通过仅对某一扇面进行有限元模型就能获得正确的应力、应变和位移分析结果,当然需要在有限元算法中引入特殊的条件。
2. 循环对称条件
2.1 节点位移的循环对称关系
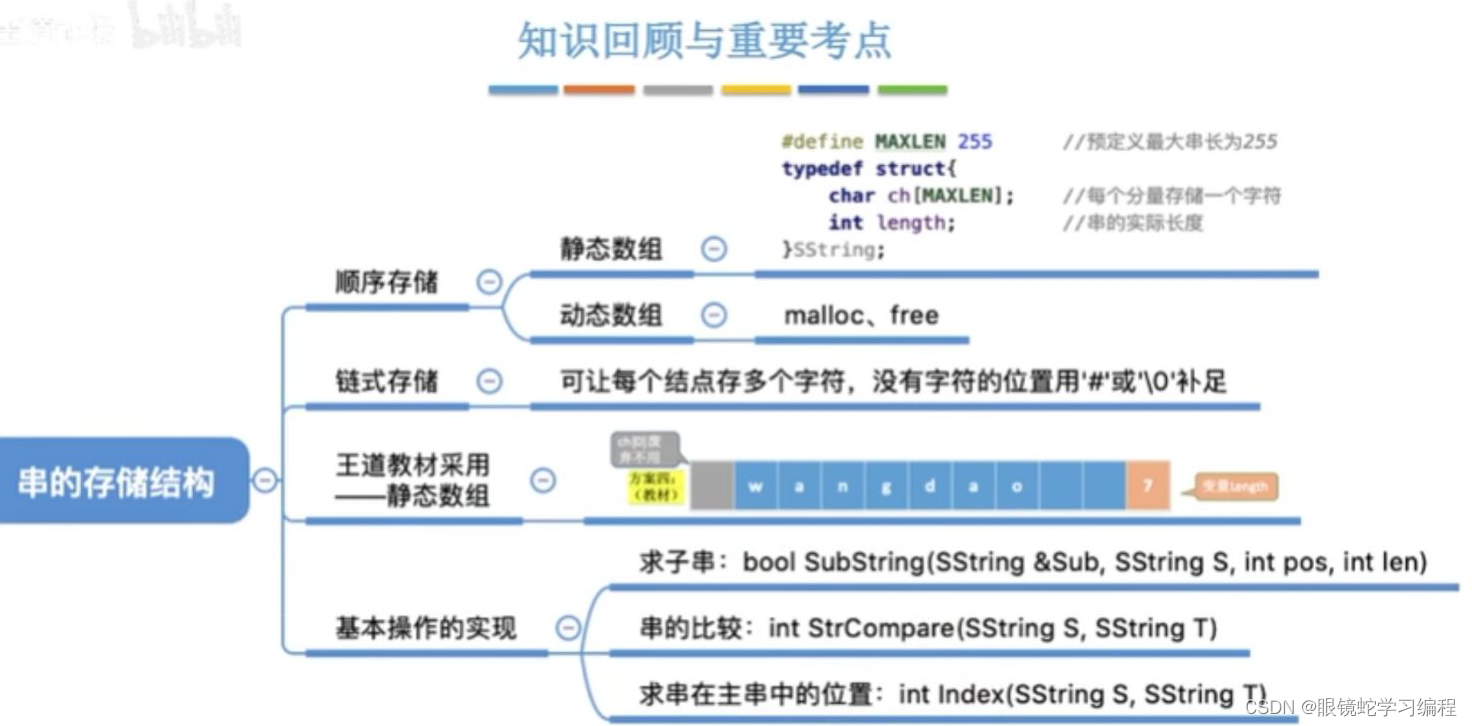
在循环对称问题中,需要引入柱坐标系,来给定循环对称条件。如下图,其中 x y z xyz xyz是笛卡尔坐标系, r θ z r\theta z rθz是柱坐标系,结构是典型轮盘的某一扇段。

在该循环对称问题中,扇面的面A的节点
i
i
i和面B的对应节点
j
j
j在柱坐标系
r
θ
z
r\theta z
rθz应该具有相同的坐标,同时应该也具备相同的位移变量。假设节点
i
i
i和节点
j
j
j分别属于面A和面B的一对对应节点,见下面示意图,那么其柱坐标下的位移变量应该满足下式关系:
u
r
i
=
u
r
j
u
θ
i
=
u
θ
j
u
z
i
=
u
z
j
u_{ri}=u_{rj}\\u_{\theta i}=u_{\theta j}\\u_{zi}=u_{zj}
uri=urjuθi=uθjuzi=uzj

节点 i i i在柱坐标系下的位移与在笛卡尔坐标系下的位移进行变换,具体的变换关系如下
−
u
r
i
sin
α
−
u
θ
i
cos
α
=
u
x
i
u
r
i
cos
α
−
u
θ
i
sin
α
=
u
y
i
u
z
i
=
u
z
i
-u_{ri}\sin\alpha-u_{\theta i}\cos\alpha=u_{xi}\\ u_{ri}\cos\alpha-u_{\theta i}\sin\alpha=u_{yi}\\u_{zi}=u_{zi}
−urisinα−uθicosα=uxiuricosα−uθisinα=uyiuzi=uzi
写成矩阵形式
[
u
x
i
u
y
i
u
z
i
]
=
[
−
sin
α
−
cos
α
0
cos
α
−
sin
α
0
0
0
1
]
[
u
r
i
u
θ
i
u
z
i
]
\begin{bmatrix} u_{xi}\\u_{yi}\\u_{zi} \end{bmatrix}= \begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{ri}\\u_{\theta i}\\u_{zi} \end{bmatrix}
uxiuyiuzi
=
−sinαcosα0−cosα−sinα0001
uriuθiuzi
节点
j
j
j在柱坐标系下的位移与在笛卡尔坐标系下的位移进行变换,具体的变换关系如下
u
r
j
sin
β
−
u
θ
j
cos
β
=
u
x
j
u
r
j
cos
β
+
u
θ
j
sin
β
=
u
y
j
u
z
j
=
u
z
j
u_{rj}\sin\beta-u_{\theta j}\cos\beta=u_{xj}\\ u_{rj}\cos\beta+u_{\theta j}\sin\beta=u_{yj}\\ u_{zj}=u_{zj}
urjsinβ−uθjcosβ=uxjurjcosβ+uθjsinβ=uyjuzj=uzj
写成矩阵形式
[
u
x
j
u
y
j
u
z
j
]
=
[
sin
β
−
cos
β
0
cos
α
sin
β
0
0
0
1
]
[
u
r
j
u
θ
j
u
z
j
]
\begin{bmatrix}u_{xj}\\u_{yj}\\u_{zj}\end{bmatrix} =\begin{bmatrix} \sin\beta & -\cos\beta & 0\\ \cos\alpha &\sin\beta & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{rj}\\u_{\theta j}\\u_{zj} \end{bmatrix}
uxjuyjuzj
=
sinβcosα0−cosβsinβ0001
urjuθjuzj
那么
[
u
r
j
u
θ
j
u
z
j
]
=
[
sin
β
cos
β
0
−
cos
α
sin
β
0
0
0
1
]
[
u
x
j
u
y
j
u
z
j
]
\begin{bmatrix}u_{rj}\\u_{\theta j}\\u_{zj}\end{bmatrix} =\begin{bmatrix} \sin\beta & \cos\beta & 0\\ -\cos\alpha &\sin\beta & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}
urjuθjuzj
=
sinβ−cosα0cosβsinβ0001
uxjuyjuzj
由于
[
u
r
i
u
θ
i
u
z
i
]
=
[
u
r
j
u
θ
j
u
z
j
]
\begin{bmatrix}u_{ri}\\u_{\theta i}\\u_{zi}\end{bmatrix} =\begin{bmatrix}u_{rj}\\u_{\theta j}\\u_{zj}\end{bmatrix}
uriuθiuzi
=
urjuθjuzj
那么
[
u
x
i
u
y
i
u
z
i
]
=
[
−
sin
α
−
cos
α
0
cos
α
−
sin
α
0
0
0
1
]
[
u
r
i
u
θ
i
u
z
i
]
=
[
−
sin
α
−
cos
α
0
cos
α
−
sin
α
0
0
0
1
]
[
u
r
j
u
θ
j
u
z
j
]
=
[
−
sin
α
−
cos
α
0
cos
α
−
sin
α
0
0
0
1
]
[
sin
β
cos
β
0
−
cos
α
sin
β
0
0
0
1
]
[
u
x
j
u
y
j
u
z
j
]
=
[
−
sin
α
sin
β
+
cos
α
cos
β
−
sin
α
cos
β
−
cos
α
sin
β
0
cos
α
sin
β
+
sin
α
cos
β
cos
α
cos
β
−
sin
α
sin
β
0
0
0
1
]
[
u
x
j
u
y
j
u
z
j
]
=
[
cos
(
α
+
β
)
−
sin
(
α
+
β
)
0
sin
(
α
+
β
)
cos
(
α
+
β
)
0
0
0
1
]
[
u
x
j
u
y
j
u
z
j
]
=
[
cos
(
θ
)
−
sin
(
θ
)
0
sin
(
θ
)
cos
(
θ
)
0
0
0
1
]
[
u
x
j
u
y
j
u
z
j
]
=
[
θ
1
]
[
u
x
j
u
y
j
u
z
j
]
\begin{bmatrix}u_{xi}\\u_{yi}\\u_{zi}\end{bmatrix} =\begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{ri}\\u_{\theta i}\\u_{zi} \end{bmatrix} =\begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{rj}\\u_{\theta j}\\u_{zj} \end{bmatrix}\\ =\begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} \sin\beta & \cos\beta & 0\\ -\cos\alpha &\sin\beta & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix} \\ =\begin{bmatrix} -\sin\alpha\sin\beta+\cos\alpha\cos\beta & -\sin\alpha\cos\beta-\cos\alpha\sin\beta & 0\\ \cos\alpha\sin\beta+\sin\alpha\cos\beta & \cos\alpha\cos\beta-\sin\alpha\sin\beta &0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}\\ =\begin{bmatrix} \cos(\alpha+\beta) & -\sin(\alpha+\beta) & 0\\ \sin(\alpha+\beta) & \cos(\alpha+\beta) &0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}\\ =\begin{bmatrix} \cos(\theta) & -\sin(\theta) & 0\\ \sin(\theta) & \cos(\theta) &0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}=\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}
uxiuyiuzi
=
−sinαcosα0−cosα−sinα0001
uriuθiuzi
=
−sinαcosα0−cosα−sinα0001
urjuθjuzj
=
−sinαcosα0−cosα−sinα0001
sinβ−cosα0cosβsinβ0001
uxjuyjuzj
=
−sinαsinβ+cosαcosβcosαsinβ+sinαcosβ0−sinαcosβ−cosαsinβcosαcosβ−sinαsinβ0001
uxjuyjuzj
=
cos(α+β)sin(α+β)0−sin(α+β)cos(α+β)0001
uxjuyjuzj
=
cos(θ)sin(θ)0−sin(θ)cos(θ)0001
uxjuyjuzj
=[θ1]
uxjuyjuzj
2.2 节点内力的循环对称关系
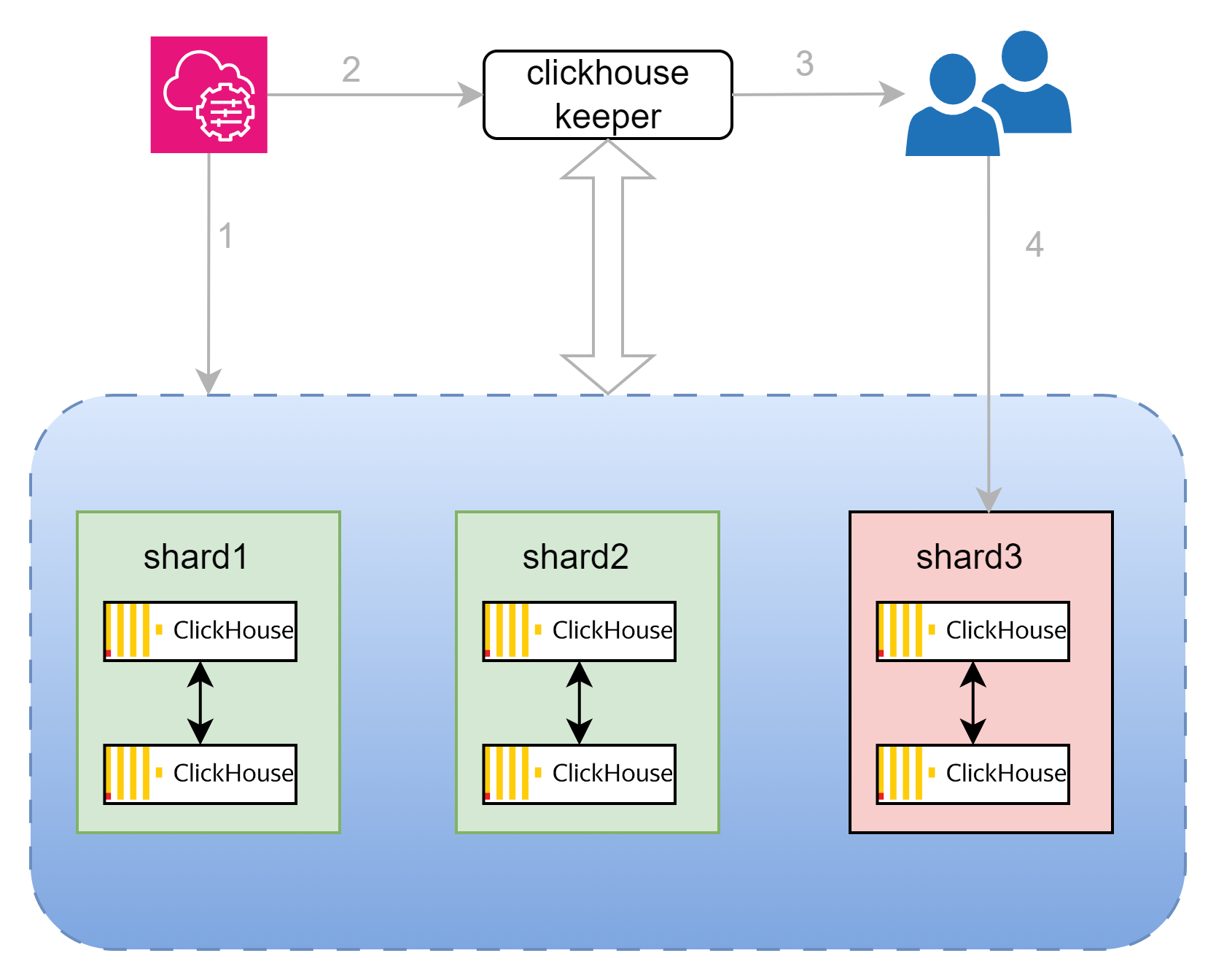
扇形段I除了节点位移存在循环对称关系,剩余扇形对扇形段I的节点力也存在循环对称关系。典型的扇形段相互作用关系见下图,其中扇形段I是分析对象,扇形段II和扇形段III对扇形段I有相互作用。
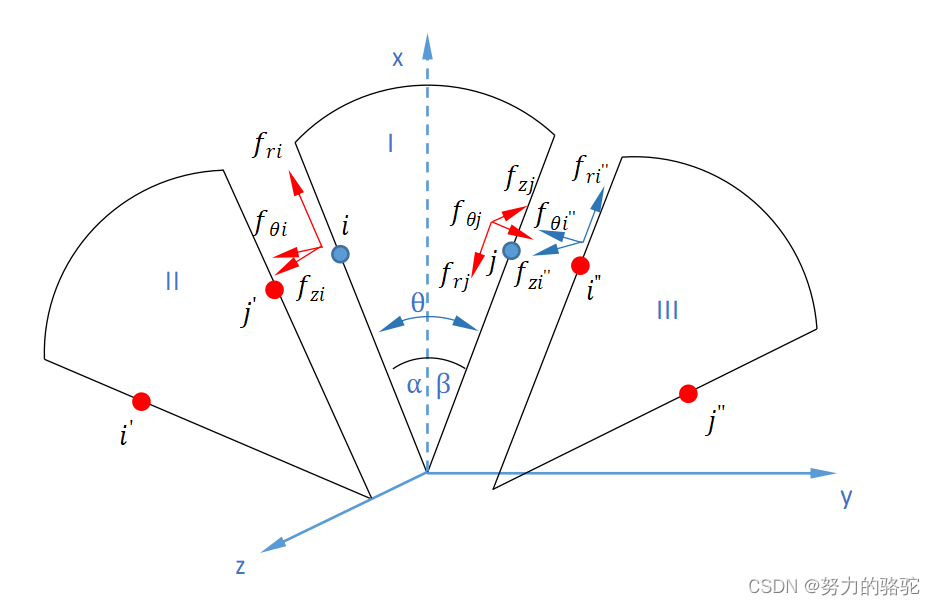
其中扇形段I、II、III是重复扇形段,
i
i
i、
i
′
i^{'}
i′、
i
′
′
i^{''}
i′′是一组对应周期循环节点,
j
j
j、
j
′
j^{'}
j′、
j
′
′
j^{''}
j′′是一组对应周期循环节点。
其中
j
′
j^{'}
j′对
i
i
i的作用力为
f
r
i
f_{ri}
fri、
f
θ
i
f_{\theta i}
fθi、
f
z
i
f_{zi}
fzi,
j
j
j对
i
′
′
i^{''}
i′′的作用力为
f
r
i
′
′
f_{ri^{''}}
fri′′、
f
θ
i
′
′
f_{\theta i^{''}}
fθi′′、
f
z
i
′
′
f_{zi^{''}}
fzi′′,从周期循环对称特征定义,可知
f
r
i
=
f
r
i
′
′
f
θ
i
=
f
θ
i
′
′
f
z
i
=
f
z
i
′
′
f_{ri}=f_{ri^{''}}\\ f_{\theta i}=f_{\theta i^{''}}\\ f_{zi}=f_{zi^{''}}
fri=fri′′fθi=fθi′′fzi=fzi′′
那么,
i
′
′
i^{''}
i′′对
j
j
j的作用力
f
r
j
f_{rj}
frj、
f
θ
j
f_{\theta j}
fθj、
f
z
j
f_{zj}
fzj,存在如下关系式
f
r
i
=
−
f
r
j
f
θ
i
=
−
f
θ
j
f
z
i
=
−
f
z
j
f_{ri}=-f_{rj}\\ f_{\theta i}=-f_{\theta j}\\ f_{zi}=-f_{zj}
fri=−frjfθi=−fθjfzi=−fzj
注:上述节点力均在柱坐标系下。
参照上节节点位移的转换关系推导过程,不难推得在上述节点力关系式在笛卡尔坐标系下的表达式
[
f
x
i
f
y
i
f
z
i
]
=
−
[
θ
1
]
[
f
x
j
f
y
j
f
z
j
]
\begin{bmatrix}f_{xi}\\f_{yi}\\f_{zi}\end{bmatrix}=-\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix} f_{xj}\\f_{yj}\\f_{zj} \end{bmatrix}
fxifyifzi
=−[θ1]
fxjfyjfzj
3. 在平衡方程中引入循环对称条件
若某循环结构包含一对循环对称节点 i i i、 j j j,不失一般性,平衡方程可以写成下式
[
k
11
k
12
⋯
k
1
i
⋯
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
i
⋯
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
k
i
1
k
i
2
⋯
k
i
i
⋯
k
i
j
⋯
k
i
n
⋮
⋮
⋮
⋮
⋮
k
j
1
k
j
2
⋯
k
j
i
⋯
k
j
j
⋯
k
j
n
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
⋯
k
n
j
⋯
k
n
n
]
[
u
1
u
2
⋮
u
i
⋮
u
j
⋮
u
n
]
=
[
R
1
+
F
1
F
2
⋮
F
i
+
f
i
⋮
F
j
+
f
j
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{i1}&k_{i2}&\cdots&k_{ii}&\cdots&k_{ij}&\cdots&k_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{j1}&k_{j2}&\cdots&k_{ji}&\cdots&k_{jj}&\cdots&k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}u_1\\u_2\\\vdots\\u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\F_i+f_i\\\vdots\\F_j+f_j\\\vdots\\F_n \end{bmatrix}
k11k21⋮ki1⋮kj1⋮kn1k12k22⋮ki2⋮kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮kii⋮kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮kij⋮kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮kin⋮kjn⋮knn
u1u2⋮ui⋮uj⋮un
=
R1+F1F2⋮Fi+fi⋮Fj+fj⋮Fn
式中
u
1
u_1
u1为模型的位移约束,有
u
1
=
u
‾
1
u_1=\overline u_1
u1=u1,
R
1
R_1
R1为支反力;
F
i
,
i
=
1
,
⋯
F_i,i=1,\cdots
Fi,i=1,⋯为节点外载荷,
f
i
、
f
j
f_i、f_j
fi、fj为其他扇形段对扇形段I的作用力,这里引入循环对称条件,
[
f
i
]
=
−
[
θ
1
]
[
f
j
]
\begin{bmatrix}f_{i}\end{bmatrix}=-\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix} f_{j}\end{bmatrix}
[fi]=−[θ1][fj]
上面平衡方程变成如下形式
[
k
11
k
12
⋯
k
1
i
⋯
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
i
⋯
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
k
i
1
k
i
2
⋯
k
i
i
⋯
k
i
j
⋯
k
i
n
⋮
⋮
⋮
⋮
⋮
k
j
1
k
j
2
⋯
k
j
i
⋯
k
j
j
⋯
k
j
n
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
⋯
k
n
j
⋯
k
n
n
]
[
u
‾
1
u
2
⋮
u
i
⋮
u
j
⋮
u
n
]
=
[
R
1
+
F
1
F
2
⋮
F
i
−
θ
f
j
⋮
F
j
+
f
j
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{i1}&k_{i2}&\cdots&k_{ii}&\cdots&k_{ij}&\cdots&k_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{j1}&k_{j2}&\cdots&k_{ji}&\cdots&k_{jj}&\cdots&k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\ u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\F_i-\theta f_j\\\vdots\\F_j+f_j\\\vdots\\F_n \end{bmatrix}
k11k21⋮ki1⋮kj1⋮kn1k12k22⋮ki2⋮kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮kii⋮kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮kij⋮kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮kin⋮kjn⋮knn
u1u2⋮ui⋮uj⋮un
=
R1+F1F2⋮Fi−θfj⋮Fj+fj⋮Fn
进一步,用
θ
T
\theta^T
θT左乘第
i
i
i行,则
[
k
11
k
12
⋯
k
1
i
⋯
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
i
⋯
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
θ
T
k
i
2
⋯
θ
T
k
i
i
⋯
θ
T
k
i
j
⋯
θ
T
k
i
n
⋮
⋮
⋮
⋮
⋮
k
j
1
k
j
2
⋯
k
j
i
⋯
k
j
j
⋯
k
j
n
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
⋯
k
n
j
⋯
k
n
n
]
[
u
‾
1
u
2
⋮
u
i
⋮
u
j
⋮
u
n
]
=
[
R
1
+
F
1
F
2
⋮
θ
T
F
i
−
f
j
⋮
F
j
+
f
j
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{j1}&k_{j2}&\cdots&k_{ji}&\cdots&k_{jj}&\cdots&k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\ u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+f_j\\\vdots\\F_n \end{bmatrix}
k11k21⋮θTki1⋮kj1⋮kn1k12k22⋮θTki2⋮kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮θTkii⋮kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮kjn⋮knn
u1u2⋮ui⋮uj⋮un
=
R1+F1F2⋮θTFi−fj⋮Fj+fj⋮Fn
将第
i
i
i行加到第
j
j
j行,上式进一步变换为
[
k
11
k
12
⋯
k
1
i
⋯
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
i
⋯
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
θ
T
k
i
2
⋯
θ
T
k
i
i
⋯
θ
T
k
i
j
⋯
θ
T
k
i
n
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
+
k
j
1
θ
T
k
i
2
+
k
j
2
⋯
θ
T
k
i
i
+
k
j
i
⋯
θ
T
k
i
j
+
k
j
j
⋯
θ
T
k
i
n
+
k
j
n
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
⋯
k
n
j
⋯
k
n
n
]
[
u
‾
1
u
2
⋮
u
i
⋮
u
j
⋮
u
n
]
=
[
R
1
+
F
1
F
2
⋮
θ
T
F
i
−
f
j
⋮
F
j
+
θ
T
F
i
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii}+k_{ji}&\cdots&\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix}
k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮θTkii⋮θTkii+kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮θTkij+kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn
u1u2⋮ui⋮uj⋮un
=
R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
将位移循环对称条件引入上式中
[
u
i
]
=
[
θ
1
]
[
u
j
]
\begin{bmatrix}u_{i}\end{bmatrix}=\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix}u_{j}\end{bmatrix}
[ui]=[θ1][uj]
那么平衡方程变换为
[
k
11
k
12
⋯
k
1
i
⋯
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
i
⋯
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
θ
T
k
i
2
⋯
θ
T
k
i
i
⋯
θ
T
k
i
j
⋯
θ
T
k
i
n
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
+
k
j
1
θ
T
k
i
2
+
k
j
2
⋯
θ
T
k
i
i
+
k
j
i
⋯
θ
T
k
i
j
+
k
j
j
⋯
θ
T
k
i
n
+
k
j
n
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
⋯
k
n
j
⋯
k
n
n
]
[
u
‾
1
u
2
⋮
θ
u
j
⋮
u
j
⋮
u
n
]
=
[
R
1
+
F
1
F
2
⋮
θ
T
F
i
−
f
j
⋮
F
j
+
θ
T
F
i
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii}+k_{ji}&\cdots&\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\\theta u_j\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix}
k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮θTkii⋮θTkii+kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮θTkij+kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn
u1u2⋮θuj⋮uj⋮un
=
R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
将
θ
\theta
θ提出来,右乘到第
i
i
i列,那么上式变为
[
k
11
k
12
⋯
k
1
i
θ
⋯
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
i
θ
⋯
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
θ
T
k
i
2
⋯
θ
T
k
i
i
θ
⋯
θ
T
k
i
j
⋯
θ
T
k
i
n
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
+
k
j
1
θ
T
k
i
2
+
k
j
2
⋯
θ
T
k
i
i
θ
+
k
j
i
θ
⋯
θ
T
k
i
j
+
k
j
j
⋯
θ
T
k
i
n
+
k
j
n
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
θ
⋯
k
n
j
⋯
k
n
n
]
[
u
‾
1
u
2
⋮
u
j
⋮
u
j
⋮
u
n
]
=
[
R
1
+
F
1
F
2
⋮
θ
T
F
i
−
f
j
⋮
F
j
+
θ
T
F
i
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}\theta&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}\theta&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}\theta&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii}\theta+k_{ji}\theta&\cdots&\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}\theta&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_j\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix}
k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1iθk2iθ⋮θTkiiθ⋮θTkiiθ+kjiθ⋮kniθ⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮θTkij+kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn
u1u2⋮uj⋮uj⋮un
=
R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
在上式中用缩减节点的位移列阵替换全节点位移列阵,即用
[
u
‾
1
,
u
2
,
⋯
,
u
i
−
1
,
u
i
+
1
,
⋯
,
u
j
,
⋯
,
u
n
]
\begin{bmatrix}\overline u_1,u_2,\cdots,u_{i-1},u_{i+1},\cdots,u_j,\cdots,u_n \end{bmatrix}
[u1,u2,⋯,ui−1,ui+1,⋯,uj,⋯,un]替换
[
u
‾
1
,
u
2
,
⋯
,
u
i
−
1
,
u
j
,
u
i
+
1
,
⋯
,
u
j
,
⋯
,
u
n
]
\begin{bmatrix}\overline u_1,u_2,\cdots,u_{i-1},u_{j},u_{i+1},\cdots,u_j,\cdots,u_n \end{bmatrix}
[u1,u2,⋯,ui−1,uj,ui+1,⋯,uj,⋯,un]
那么相应的要将位移列阵中第
i
i
i行归属
u
j
u_j
uj合并到第
j
j
j列,那么平衡方程变换为
[
k
11
k
12
⋯
k
1
i
−
1
k
1
i
+
1
⋯
k
1
i
θ
+
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
i
−
1
k
2
i
+
1
⋯
k
2
i
θ
+
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
θ
T
k
i
2
⋯
θ
T
k
i
i
−
1
θ
T
k
i
i
+
1
⋯
θ
T
k
i
i
θ
+
θ
T
k
i
j
⋯
θ
T
k
i
n
⋮
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
+
k
j
1
θ
T
k
i
2
+
k
j
2
⋯
θ
T
k
i
i
−
1
+
k
j
i
−
1
θ
T
k
i
i
+
1
+
k
j
i
+
1
⋯
θ
T
k
i
i
θ
+
k
j
i
θ
+
θ
T
k
i
j
+
k
j
j
⋯
θ
T
k
i
n
+
k
j
n
⋮
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
−
1
k
n
i
+
1
⋯
k
n
i
θ
+
k
n
j
⋯
k
n
n
]
n
×
(
n
−
1
)
[
u
‾
1
u
2
⋮
u
i
−
1
u
i
+
1
⋮
u
j
⋮
u
n
]
(
n
−
1
)
×
1
=
[
R
1
+
F
1
F
2
⋮
θ
T
F
i
−
f
j
⋮
F
j
+
θ
T
F
i
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i-1}&k_{1i+1}&\cdots&k_{1i}\theta +k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i-1}&k_{2i+1}&\cdots&k_{2i}\theta+k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii-1}&\theta^Tk_{ii+1} &\cdots&\theta^Tk_{ii}\theta+\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii-1}+k_{ji-1}&\theta^Tk_{ii+1} +k_{ji+1}&\cdots&\theta^Tk_{ii}\theta+k_{ji}\theta+\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni-1}&k_{ni+1}&\cdots&k_{ni}\theta+k_{nj}&\cdots&k_{nn}\\\end{bmatrix}_{n\times (n-1)} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_{i-1}\\u_{i+1}\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}_{(n-1)\times 1}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix}
k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1i−1k2i−1⋮θTkii−1⋮θTkii−1+kji−1⋮kni−1k1i+1k2i+1⋮θTkii+1⋮θTkii+1+kji+1⋮kni+1⋯⋯⋯⋯⋯k1iθ+k1jk2iθ+k2j⋮θTkiiθ+θTkij⋮θTkiiθ+kjiθ+θTkij+kjj⋮kniθ+knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn
n×(n−1)
u1u2⋮ui−1ui+1⋮uj⋮un
(n−1)×1=
R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
事实上如果位移列阵自由度为
(
n
−
1
)
(n-1)
(n−1),那么相应的方程也只需要
(
n
−
1
)
(n-1)
(n−1)个,因此我们去掉第
i
i
i方程,那么平衡方程变成
[
k
11
k
12
⋯
k
1
,
i
−
1
k
1
,
i
+
1
⋯
k
1
i
θ
+
k
1
j
⋯
k
1
n
k
21
k
22
⋯
k
2
,
i
−
1
k
2
,
i
+
1
⋯
k
2
i
θ
+
k
2
j
⋯
k
2
n
⋮
⋮
⋮
⋮
⋮
⋮
k
i
−
1
,
1
k
i
−
1
,
2
⋯
k
i
−
1
,
i
−
1
k
i
−
1
,
i
+
1
⋯
k
i
−
1
,
i
θ
+
k
i
−
1
,
j
⋯
k
i
−
1
,
n
k
i
+
1
,
1
k
i
+
1
,
2
⋯
k
i
+
1
,
i
−
1
k
i
+
1
,
i
+
1
⋯
k
i
+
1
,
i
θ
+
k
i
+
1
,
j
⋯
k
i
+
1
,
n
⋮
⋮
⋮
⋮
⋮
⋮
θ
T
k
i
1
+
k
j
1
θ
T
k
i
2
+
k
j
2
⋯
θ
T
k
i
,
i
−
1
+
k
j
,
i
−
1
θ
T
k
i
,
i
+
1
+
k
j
,
i
+
1
⋯
θ
T
k
i
i
θ
+
k
j
i
θ
+
θ
T
k
i
j
+
k
j
j
⋯
θ
T
k
i
n
+
k
j
n
⋮
⋮
⋮
⋮
⋮
⋮
k
n
1
k
n
2
⋯
k
n
i
−
1
k
n
i
+
1
⋯
k
n
i
θ
+
k
n
j
⋯
k
n
n
]
(
n
−
1
)
×
(
n
−
1
)
[
u
‾
1
u
2
⋮
u
i
−
1
u
i
+
1
⋮
u
j
⋮
u
n
]
(
n
−
1
)
×
1
=
[
R
1
+
F
1
F
2
⋮
F
i
−
1
F
i
+
1
⋮
F
j
+
θ
T
F
i
⋮
F
n
]
\begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1,i-1}&k_{1,i+1}&\cdots&k_{1i}\theta +k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2,i-1}&k_{2,i+1}&\cdots&k_{2i}\theta+k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ k_{i-1,1}&k_{i-1,2}&\cdots&k_{i-1,i-1}&k_{i-1,i+1} &\cdots &k_{i-1,i}\theta +k_{i-1,j}&\cdots&k_{i-1,n}\\ k_{i+1,1}&k_{i+1,2}&\cdots&k_{i+1,i-1}&k_{i+1,i+1} &\cdots &k_{i+1,i}\theta +k_{i+1,j}&\cdots&k_{i+1,n}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{i,i-1}+k_{j,i-1}&\theta^Tk_{i,i+1} +k_{j,i+1}&\cdots&\theta^Tk_{ii}\theta+k_{ji}\theta+\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni-1}&k_{ni+1}&\cdots&k_{ni}\theta+k_{nj}&\cdots&k_{nn}\\\end{bmatrix}_{(n-1)\times (n-1)} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_{i-1}\\u_{i+1}\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}_{(n-1)\times 1}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\F_{i-1}\\F_{i+1}\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix}
k11k21⋮ki−1,1ki+1,1⋮θTki1+kj1⋮kn1k12k22⋮ki−1,2ki+1,2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯⋯k1,i−1k2,i−1⋮ki−1,i−1ki+1,i−1⋮θTki,i−1+kj,i−1⋮kni−1k1,i+1k2,i+1⋮ki−1,i+1ki+1,i+1⋮θTki,i+1+kj,i+1⋮kni+1⋯⋯⋯⋯⋯⋯k1iθ+k1jk2iθ+k2j⋮ki−1,iθ+ki−1,jki+1,iθ+ki+1,j⋮θTkiiθ+kjiθ+θTkij+kjj⋮kniθ+knj⋯⋯⋯⋯⋯⋯k1nk2n⋮ki−1,nki+1,n⋮θTkin+kjn⋮knn
(n−1)×(n−1)
u1u2⋮ui−1ui+1⋮uj⋮un
(n−1)×1=
R1+F1F2⋮Fi−1Fi+1⋮Fj+θTFi⋮Fn
将上式写成分块矩阵形式
[
k
11
K
12
K
21
K
22
]
[
u
‾
1
U
2
]
=
[
R
1
+
F
1
F
^
]
\begin{bmatrix}k_{11}&K_{12}\\K_{21}&K_{22} \end{bmatrix}\begin{bmatrix}\overline u_{1}\\U_{2} \end{bmatrix}=\begin{bmatrix}R_{1}+F_{1}\\ \hat F \end{bmatrix}
[k11K21K12K22][u1U2]=[R1+F1F^]
将其展开
k
11
u
‾
1
+
K
12
U
2
=
R
1
+
F
1
K
21
u
‾
1
+
K
22
U
2
=
F
^
k_{11}\overline u_{1}+K_{12}U_{2} = R_{1}+F_{1}\\ K_{21}\overline u_{1}+K_{22}U_{2}=\hat F
k11u1+K12U2=R1+F1K21u1+K22U2=F^
那么
U
2
U_{2}
U2可以从下式求解
U
2
=
K
22
−
1
(
F
^
−
K
21
u
‾
1
)
U_{2}=K_{22}^{-1}(\hat F - K_{21}\overline u_{1})
U2=K22−1(F^−K21u1)
那么,有
R
1
=
k
11
u
‾
1
+
K
12
U
2
−
F
1
R_{1}=k_{11}\overline u_{1}+K_{12}U_{2}-F_{1}
R1=k11u1+K12U2−F1
同时,在确定
u
j
u_{j}
uj后,将其回代入下式
[
u
i
]
=
[
θ
1
]
[
u
j
]
\begin{bmatrix}u_{i}\end{bmatrix}=\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix}u_{j}\end{bmatrix}
[ui]=[θ1][uj]
可以确定
u
i
u_{i}
ui,那么就确定全部节点位移,带入平衡方程可以得到
f
i
、
f
j
f_{i}、f_{j}
fi、fj,解得所有未知量。