目录
理论推导之从相机坐标系到像素坐标系
机械参数对相机内参的影响
Resize与Crop对相机内参的影响
参考文献
理论推导之从相机坐标系到像素坐标系
相机内参的意义即从相机坐标系到像素坐标系的表达,其中共涉及到三个坐标系:相机坐标系、成像坐标系、像素坐标系,其中进相机坐标系为3维坐标系,其他为平面坐标。如下图,引用了网络上常见的图例来推导其中的坐标变换。
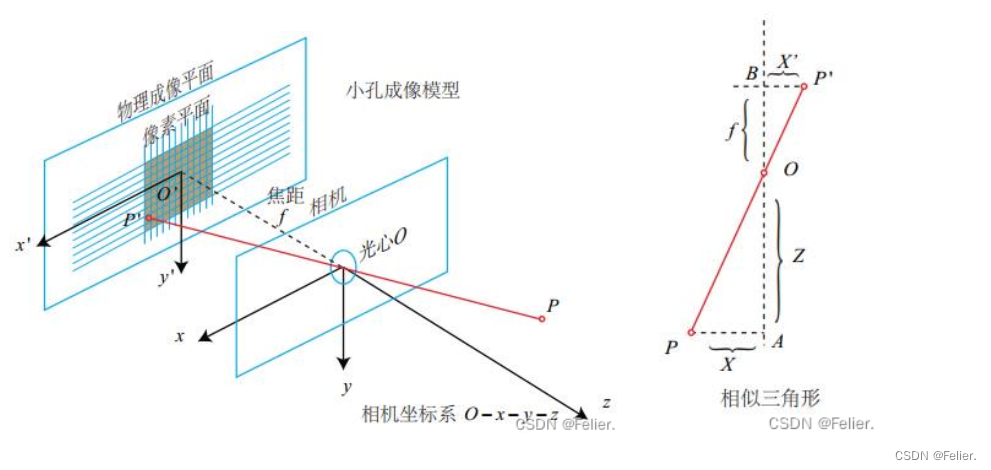
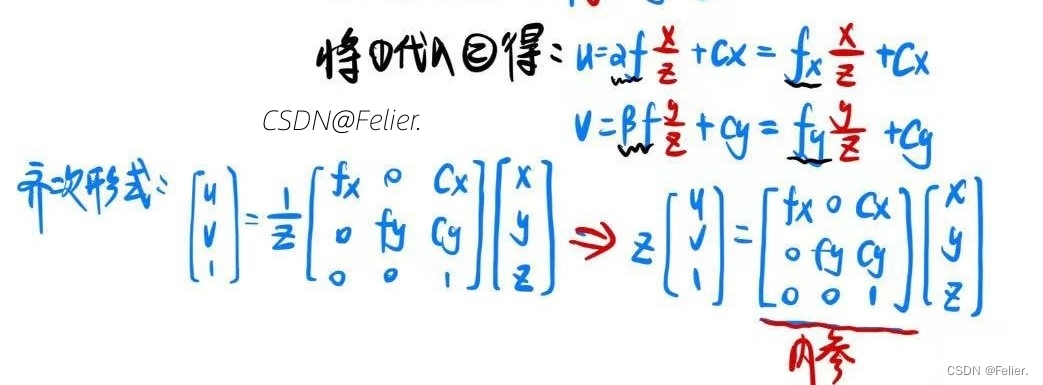
如下图所示即为相机内参的详细推导过程。其中第四行中的负号其实是根据小孔成像的倒立原理形成的,而后面我们为了表示方便,同时也是统一两个平面坐标系的方向又取消掉了负号,最终推得了内参的表示形式。

机械参数对相机内参的影响
参考下面我们推的内参表达式,影响内参的一共有三类参数:焦距、坐标缩放系数、坐标原点位置。其中焦距这个参数就是由机械参数决定的。
从设计与制造的角度来讲:不同相机供应商的结构设计、工艺水平影响相机的尺寸。学机械的朋友们应该清楚,由于公差互换性的存在,即便同一型号、同一生产批次的零件尺寸也不近相同;从产品使用的角度来讲,零件由于振动、碰撞等不可控因素导致的机械部件的相对位置变化,如镜头的同轴度超差等原因,也势必引起内参的变化。
Resize与Crop对相机内参的影响
Resize或者Crop其实是图像处理的概念,其变换方式可以等价于我们在推导过程中的坐标缩放和坐标系平移的操作,当进行图像Resize或者Crop时,其对应的内参系数变化分别如下式。
# 当进行图像Resize时,内参矩阵中
fx'=Rx*fx, fy'=Ry*fy
# 当进行图像Crop时,内参矩阵中
Cx'=Cx-△x, Cy'=Cy-△y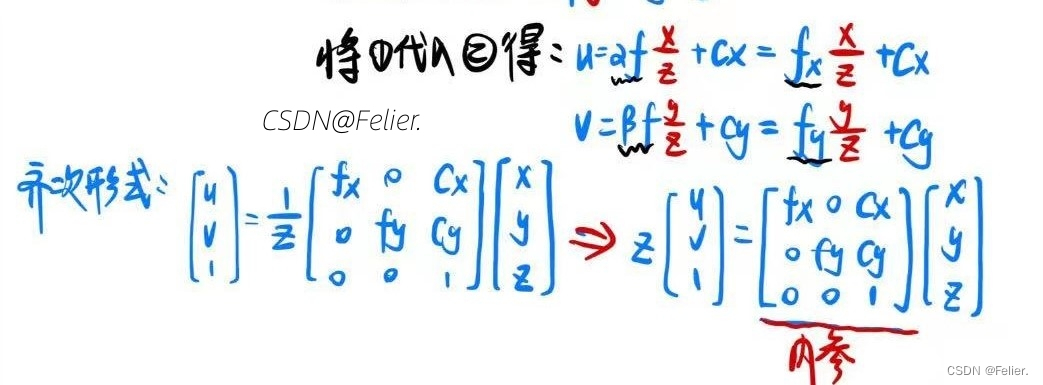
当我们抛开具体的应用场景在谈Resize或者Crop对相机内参的影响时,需要注意的就是:由于图像Resize或Crop整体坐标变换的影响,可以直接等效为内参变换对整体坐标变换的影响。而现实中,图像不管是Resize还是Crop,都不会真实影响到相机的内外参,而仅仅影响了一连串的变换矩阵罢了。
参考文献
【1】#