目录
设置预测范围对系统的影响
设置输入输出约束对系统的影响
设置权重对系统的影响
调整Close-Loop Performance 和State Estimation效果
检查MPC设计是否合理
总结
设置预测范围对系统的影响
预测范围越小,响应越快,预测性能越差,系统稳定性越差,控制范围不能大于预测范围。预测范围越大,预测能力越强,但是计算复杂度也会增加。需要的算力就越多,也就是说系统越稳定,预测范围越小越好。选择一个平衡点很重要!
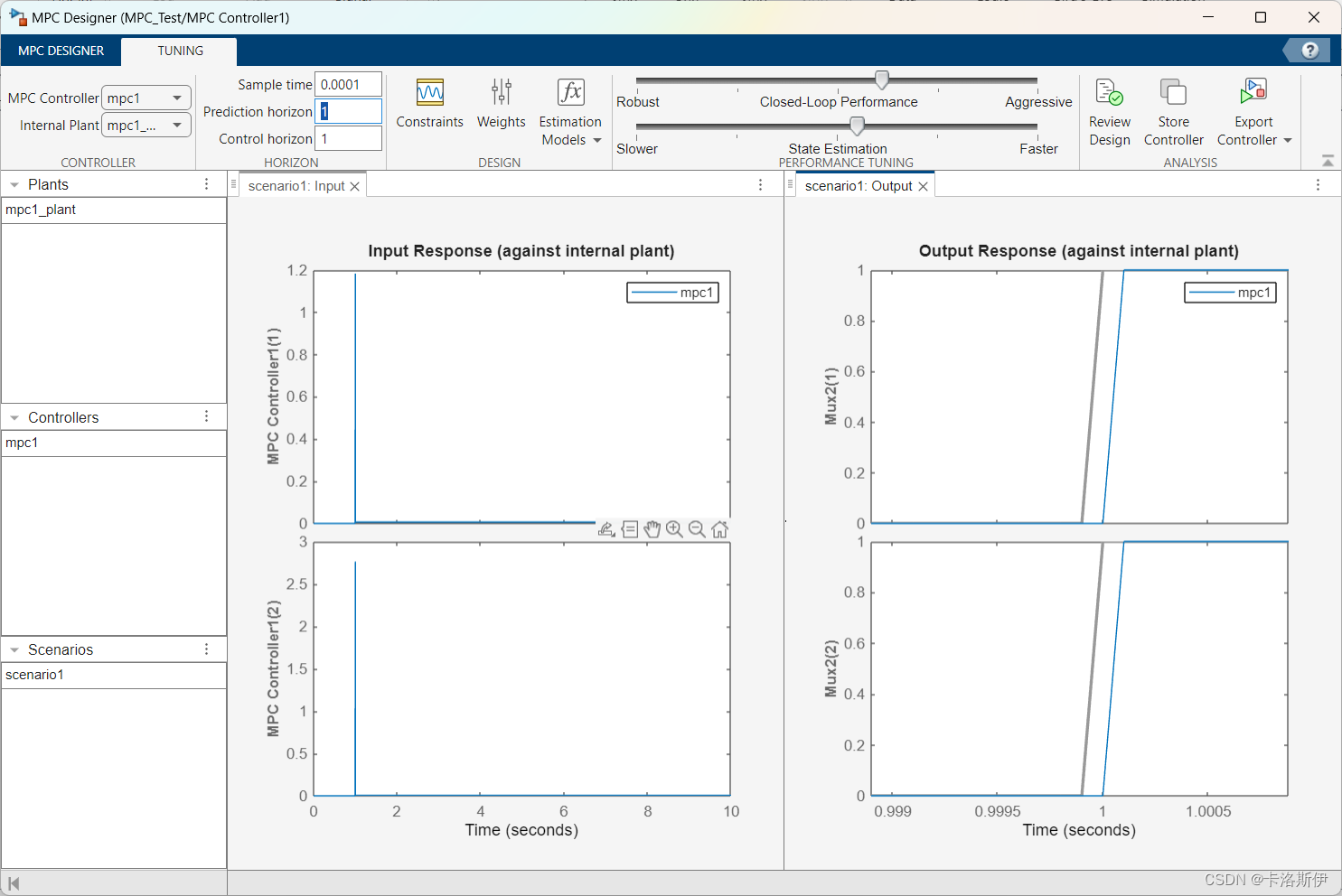
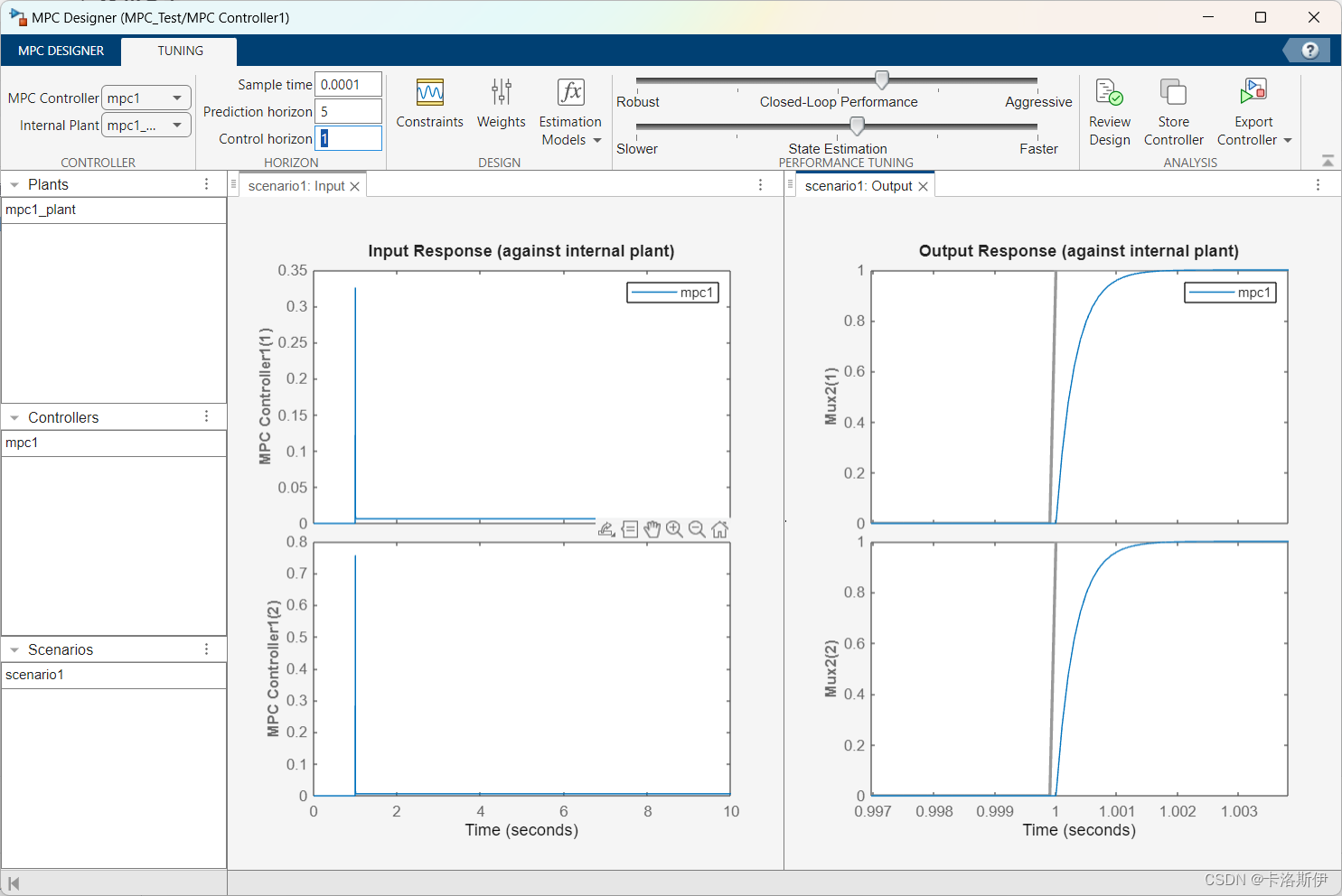 预测周期和控制周期都增器,系统响应也会比较快,不过计算就更复杂了。如下
预测周期和控制周期都增器,系统响应也会比较快,不过计算就更复杂了。如下
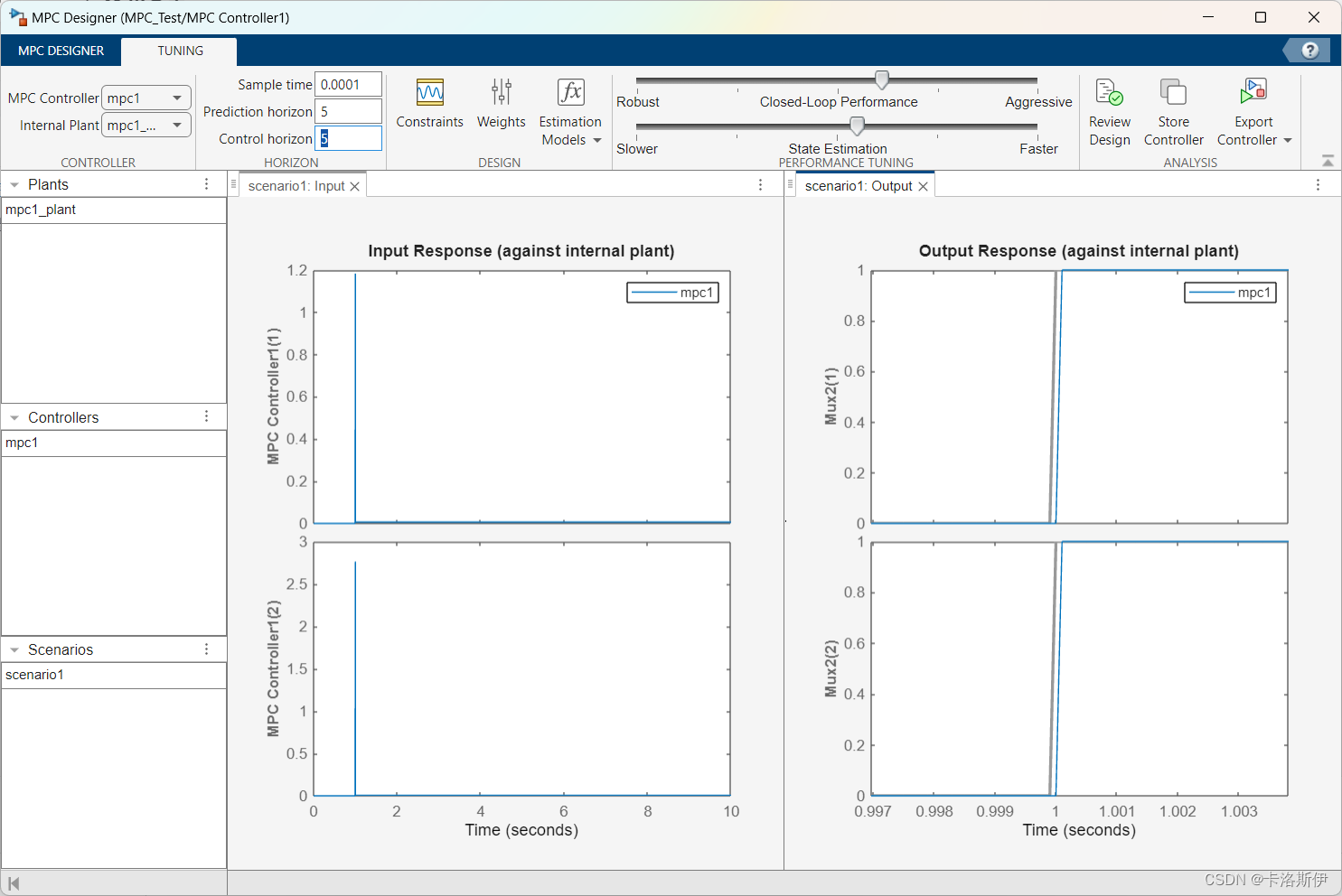 调整三个周期进入稳态
调整三个周期进入稳态
设置输入输出约束对系统的影响
输入输出约束(Input and Output Constraints)
设置约束条件来限制系统的行为和运行范围,设置合理的约束条件保证系统安全稳定。
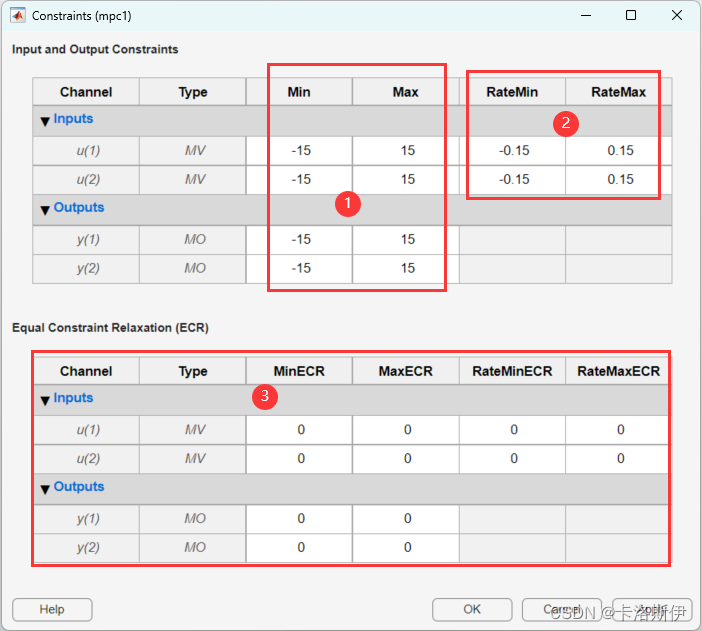
1:表示输入输出限制,和被控系统的物理特性有关,比如电机DQ轴电流的输入输出上下限。
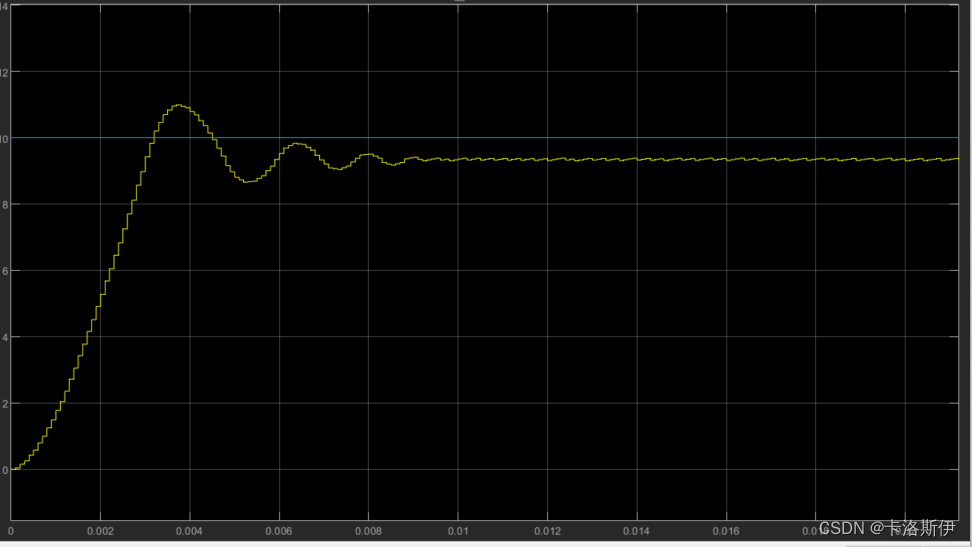
2:是最大最小变化率,如果设置太小,响应会慢,如(RateMin和Max都是0.15):
如下,RateMin和Max都是10 。可以看出每一个step的跳变是非常大的,实际工程中需要根据系统特性进行选择,如果想要响应可以设置大些,如果想要超调小,那就设置小一些。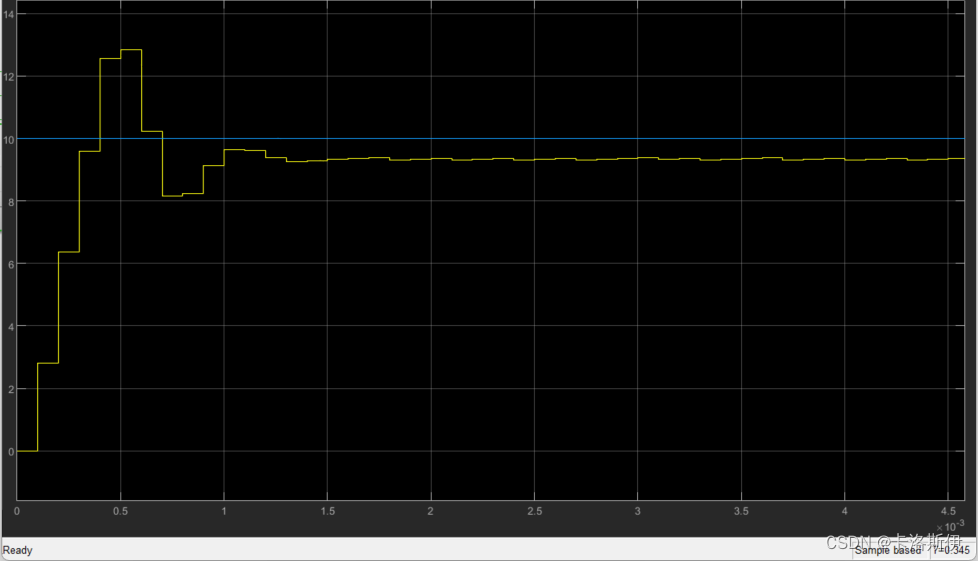
设置权重对系统的影响
调整权重:调整权重以优先考虑最重要的控制目标。例如,如果最大限度地减少与设定值的偏差是最重要的目标,则增加输出误差项的权重。
如下:输入权重大于输出权重,设定与目标存在很大偏差。如果系统稳态误差太大,可以调调输出权重。
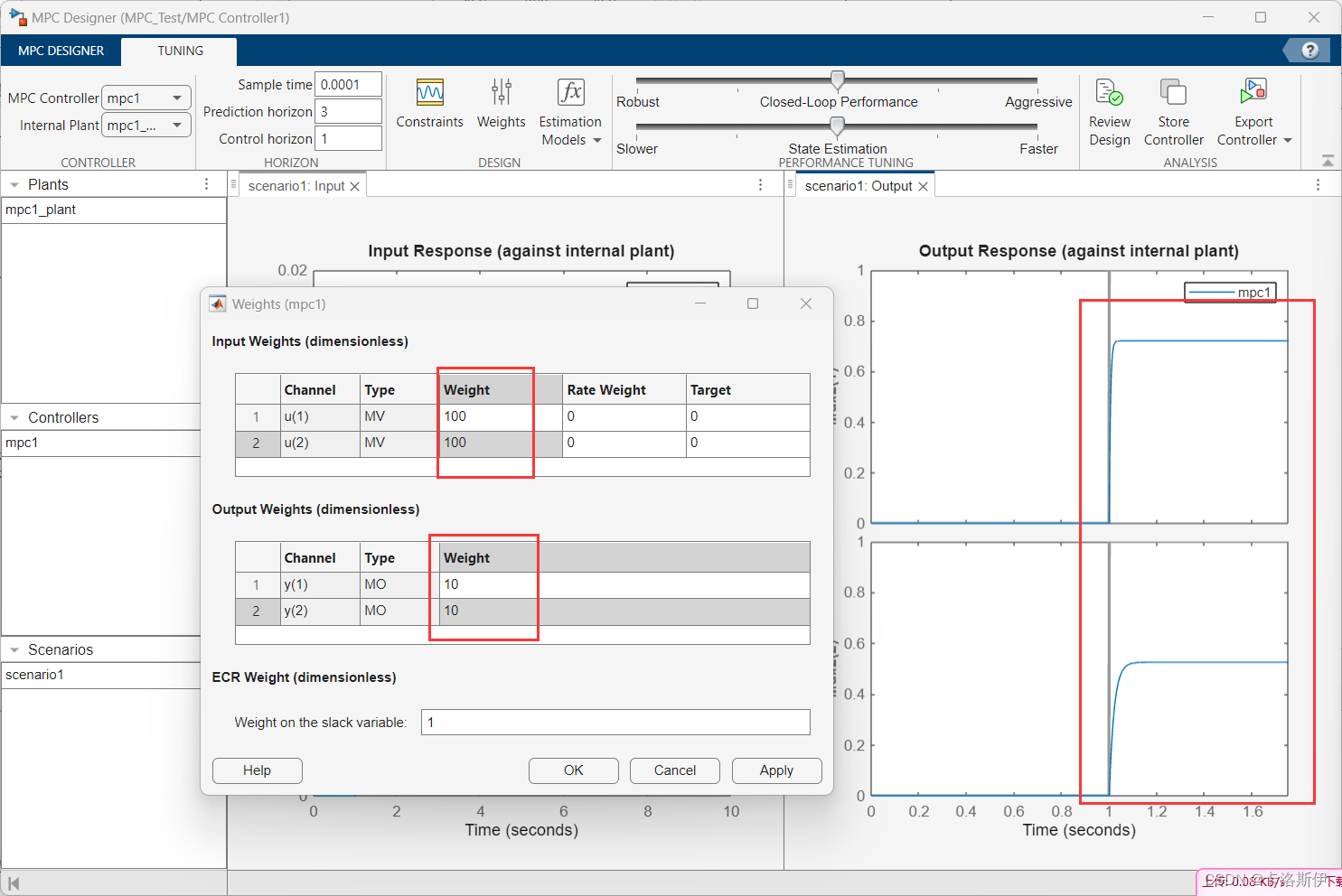
具体的效果可以参考下面的仿真。
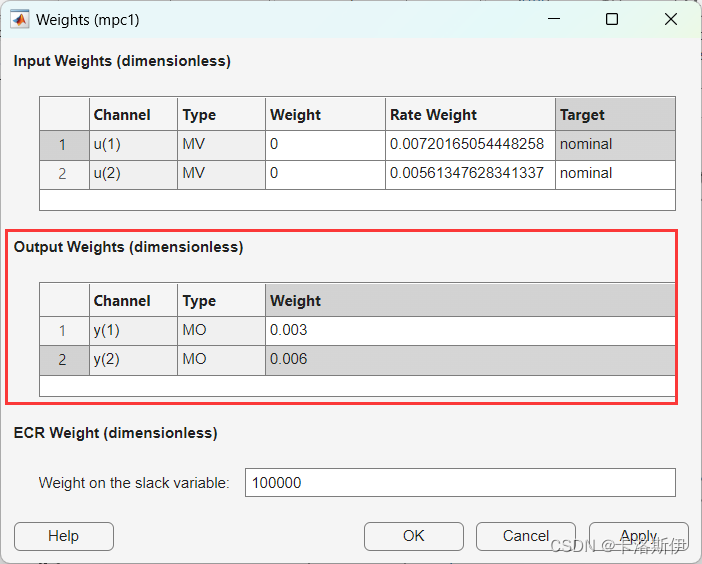
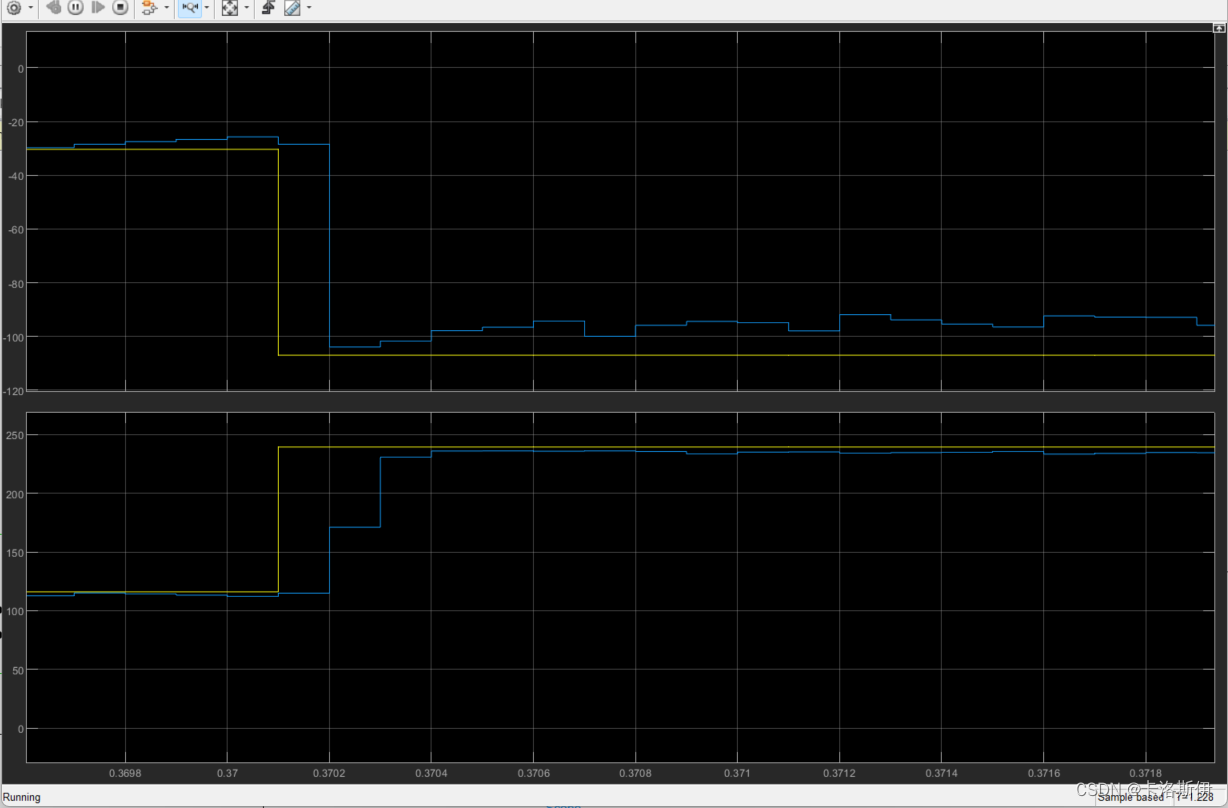
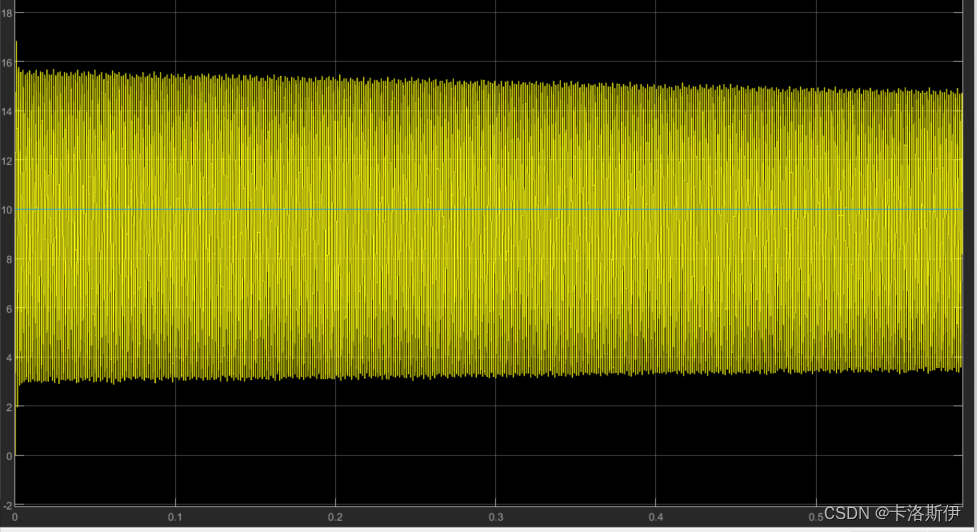
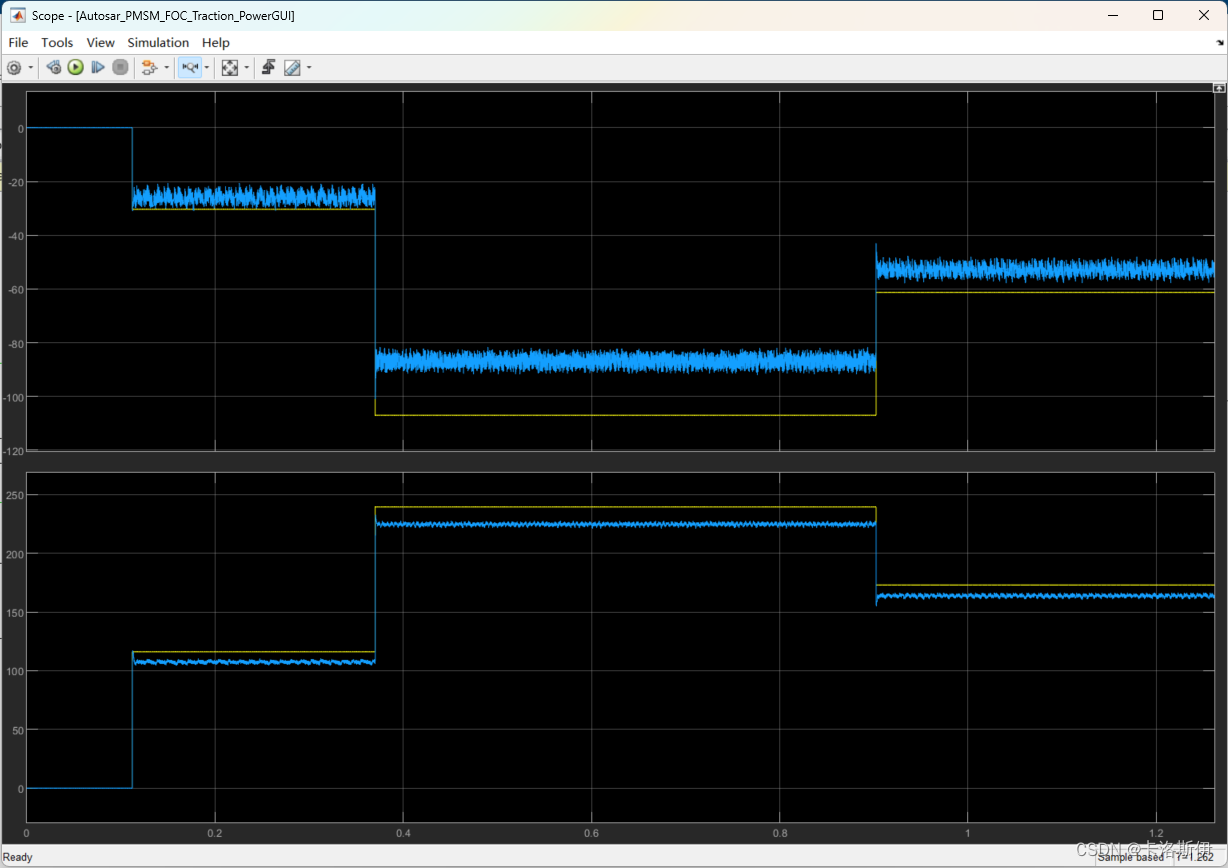
输出权重太小,系统振荡,效果如下蓝色Ref和黄色feedback。
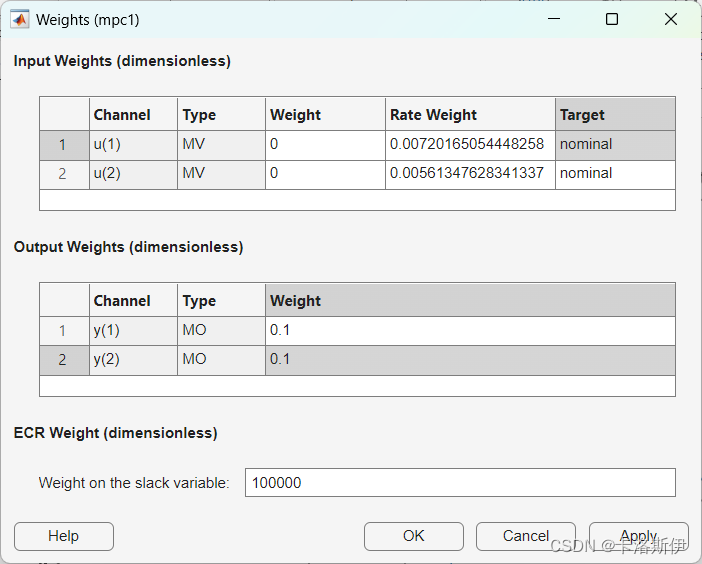
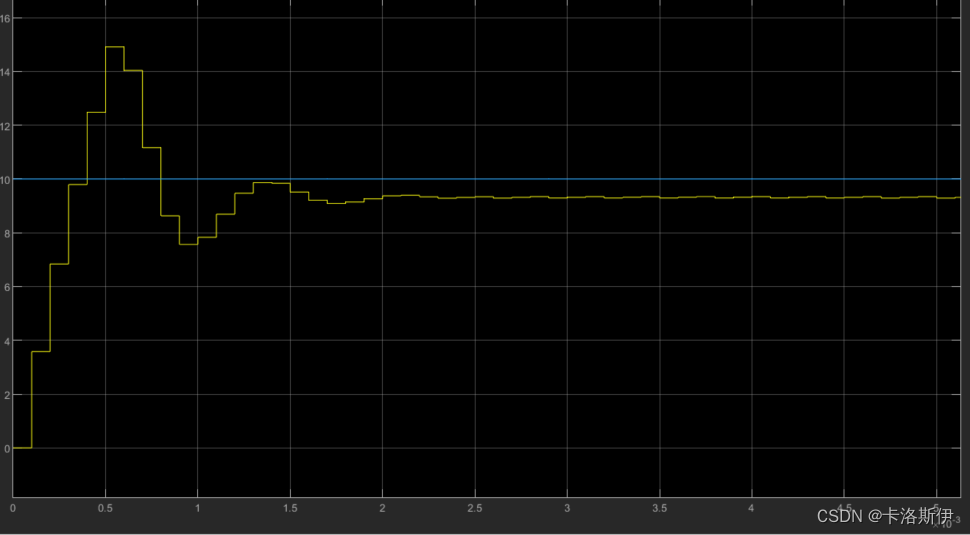
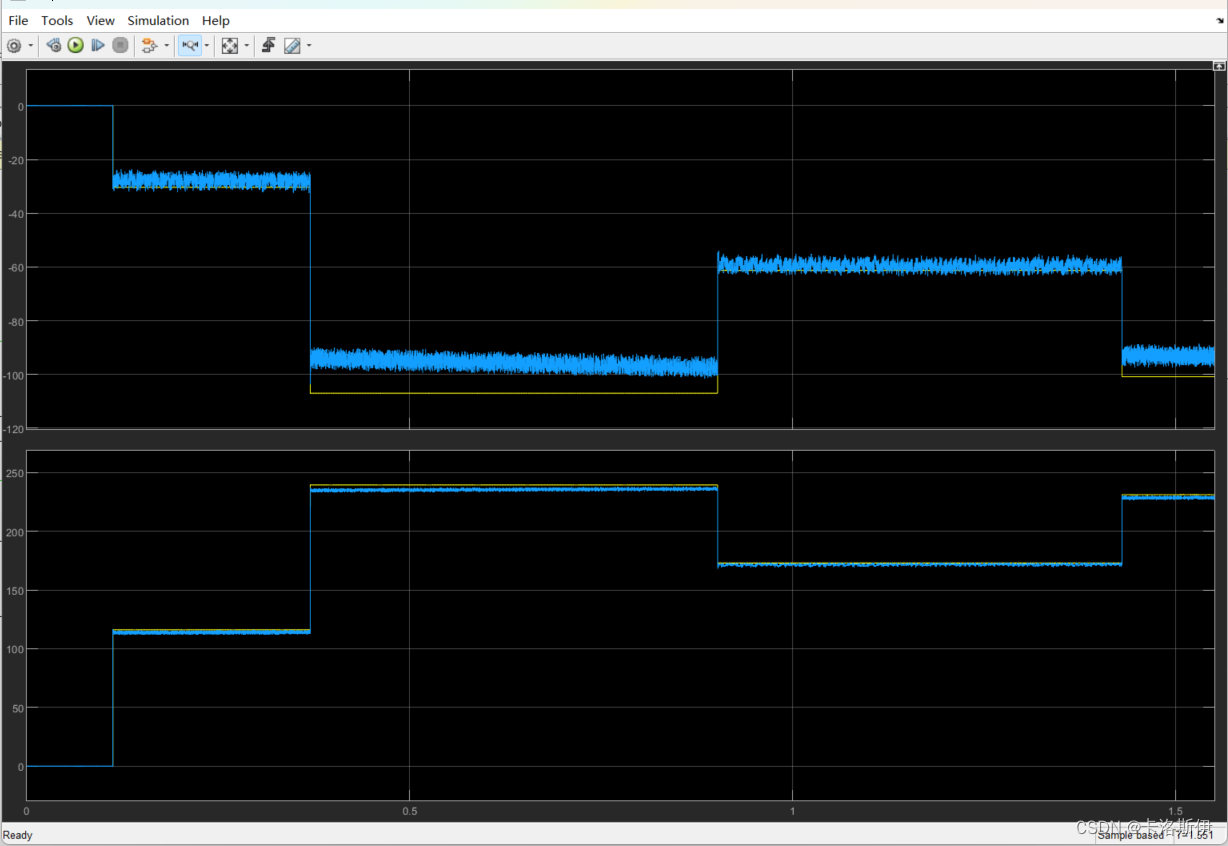
 增加输出权重后
增加输出权重后
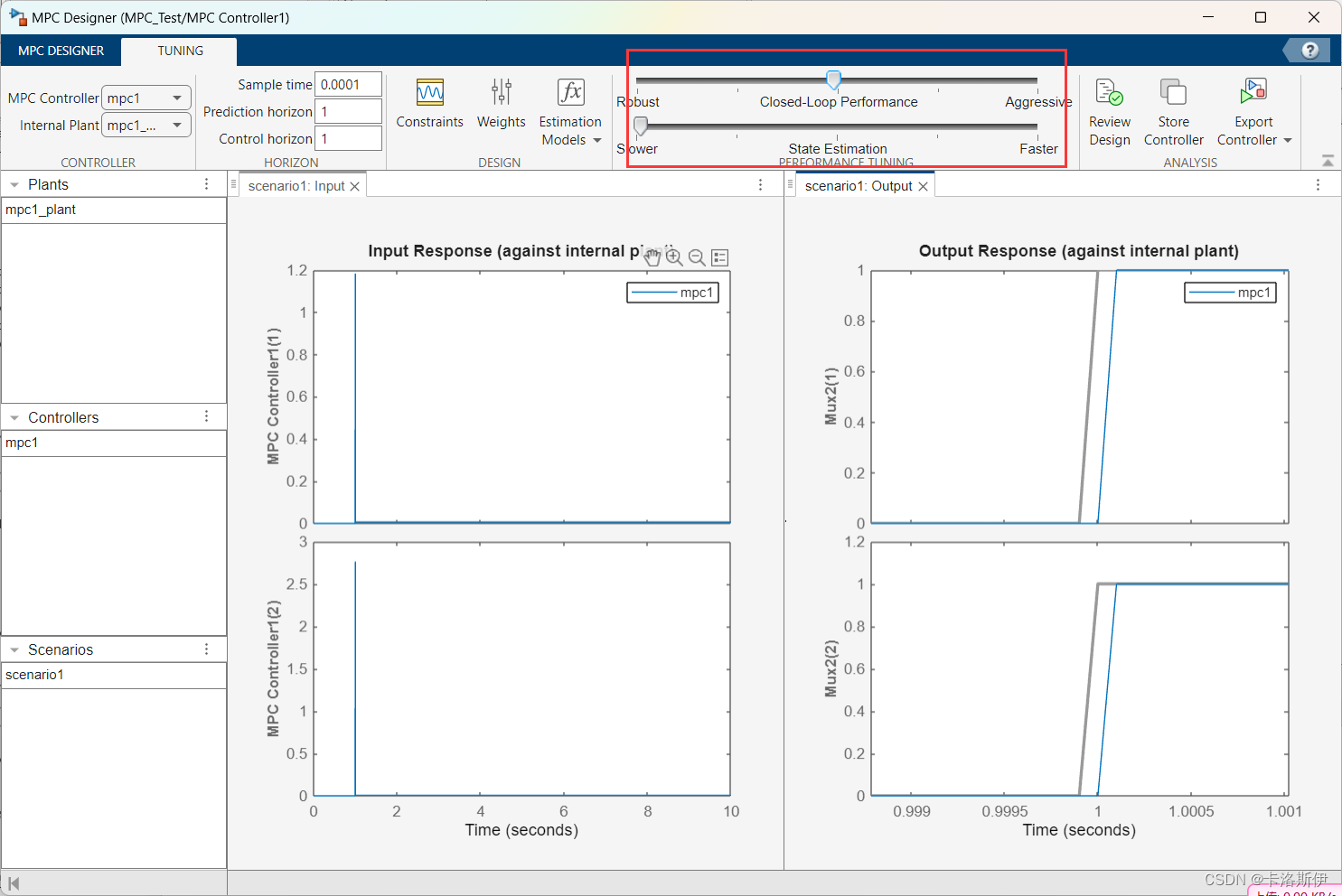
调整Close-Loop Performance 和State Estimation效果
如下,如果State Estimation太小,稳态误差大。在调权重还存在稳态误差的情况下,可以调节该参数。

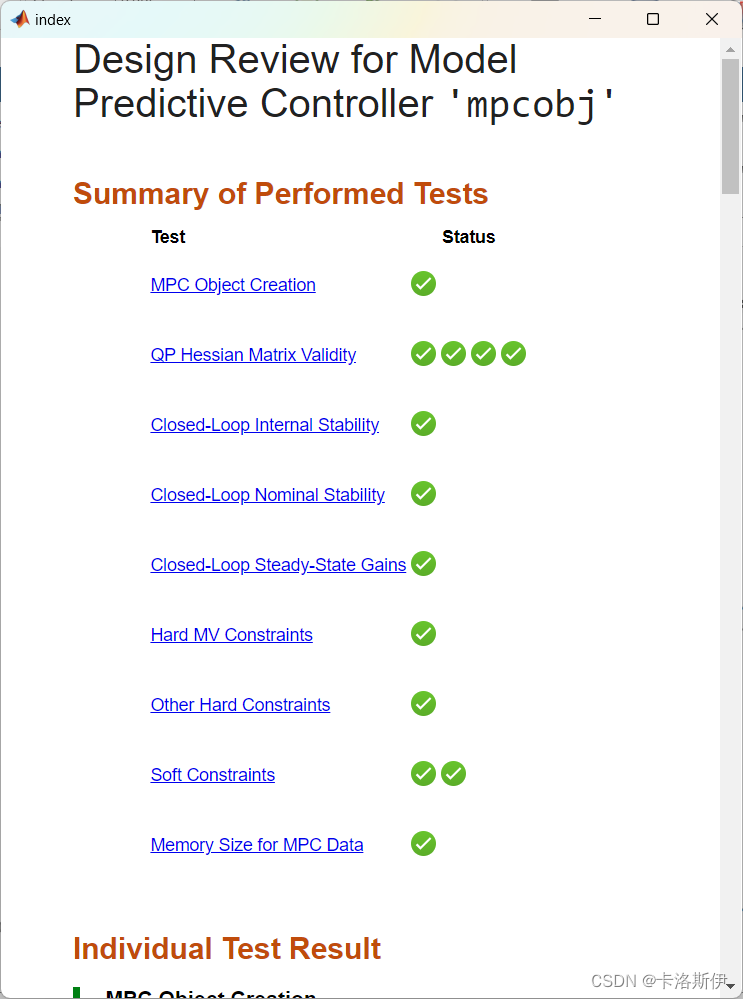
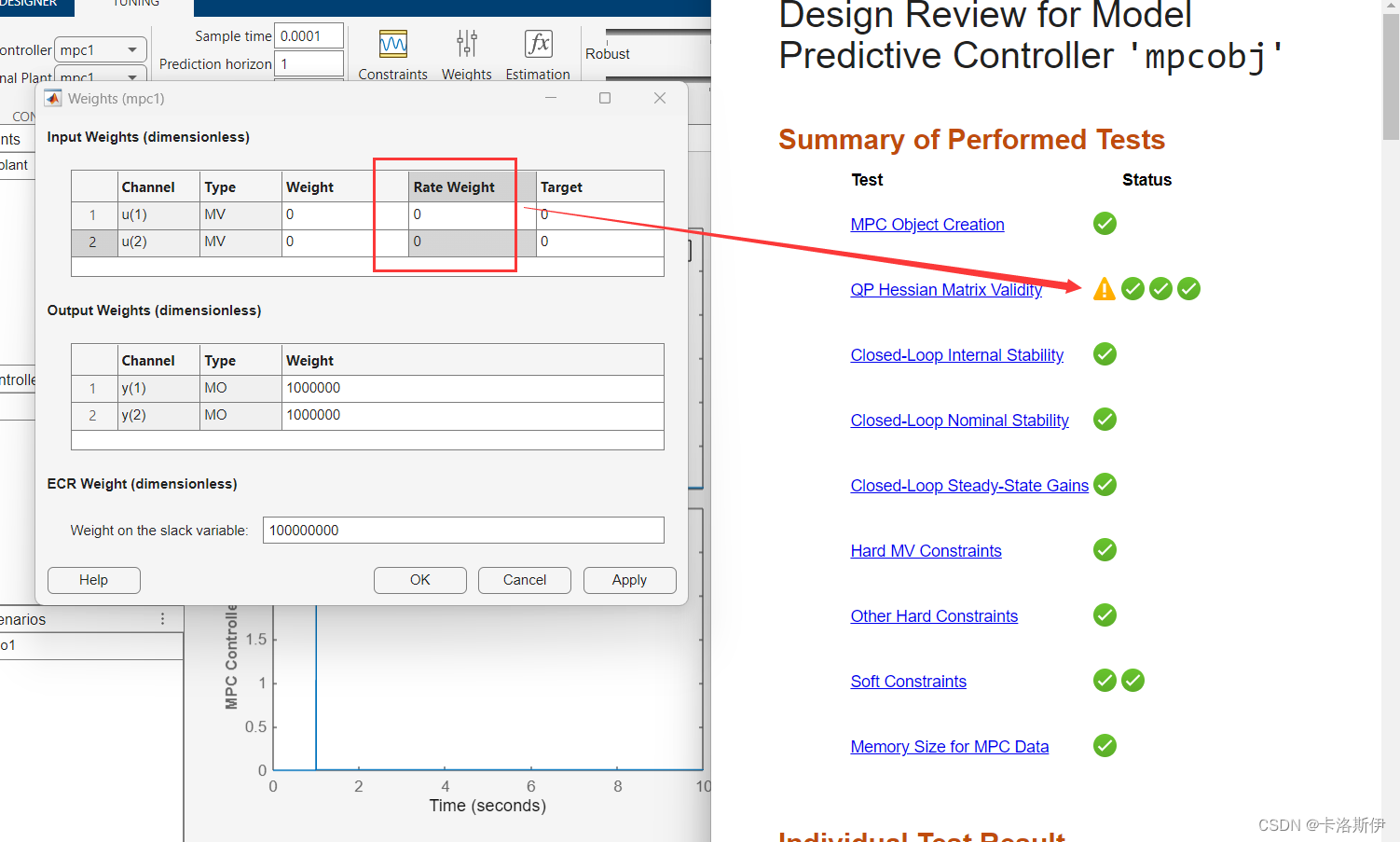
检查MPC设计是否合理
MPC Designer提供了一个工具Review Design,方便设计的时候检查参数的合理性。如下,如果参数设计合理,相应的选项显示绿色。
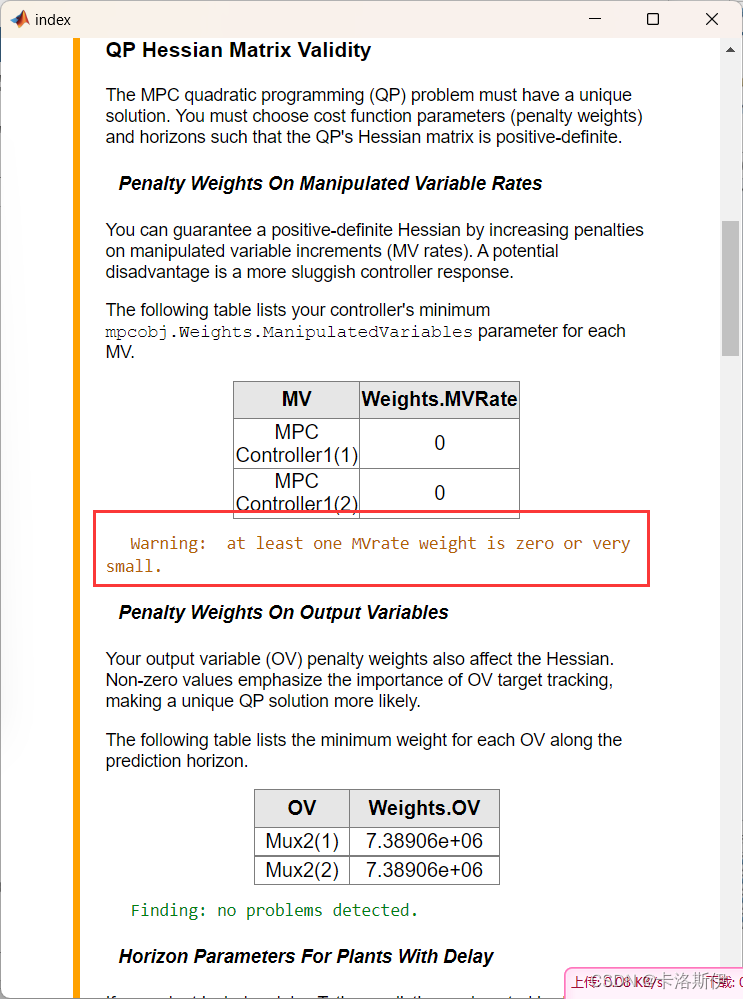
如下,我们把其中一个参数置零,这里就出现了一个警告,可以点进去查看警告的原因。
按照提示调整,再Review一下就好了。
总结
这里简单总结了MPC参数的调试效果,供参考!由于没有扰动模型,所以这里不需要添加扰动。完全就是把这玩意儿当成一个PI控制器来用。