导出onnx文件
直接使用脚本
import torch
from mmdet.apis import init_detector, inference_detector
config_file = './configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py'
checkpoint_file = 'yolov3_mobilenetv2_mstrain-416_300e_coco_20210718_010823-f68a07b3.pth'
model = init_detector(config_file, checkpoint_file, device='cpu') # or device='cuda:0'
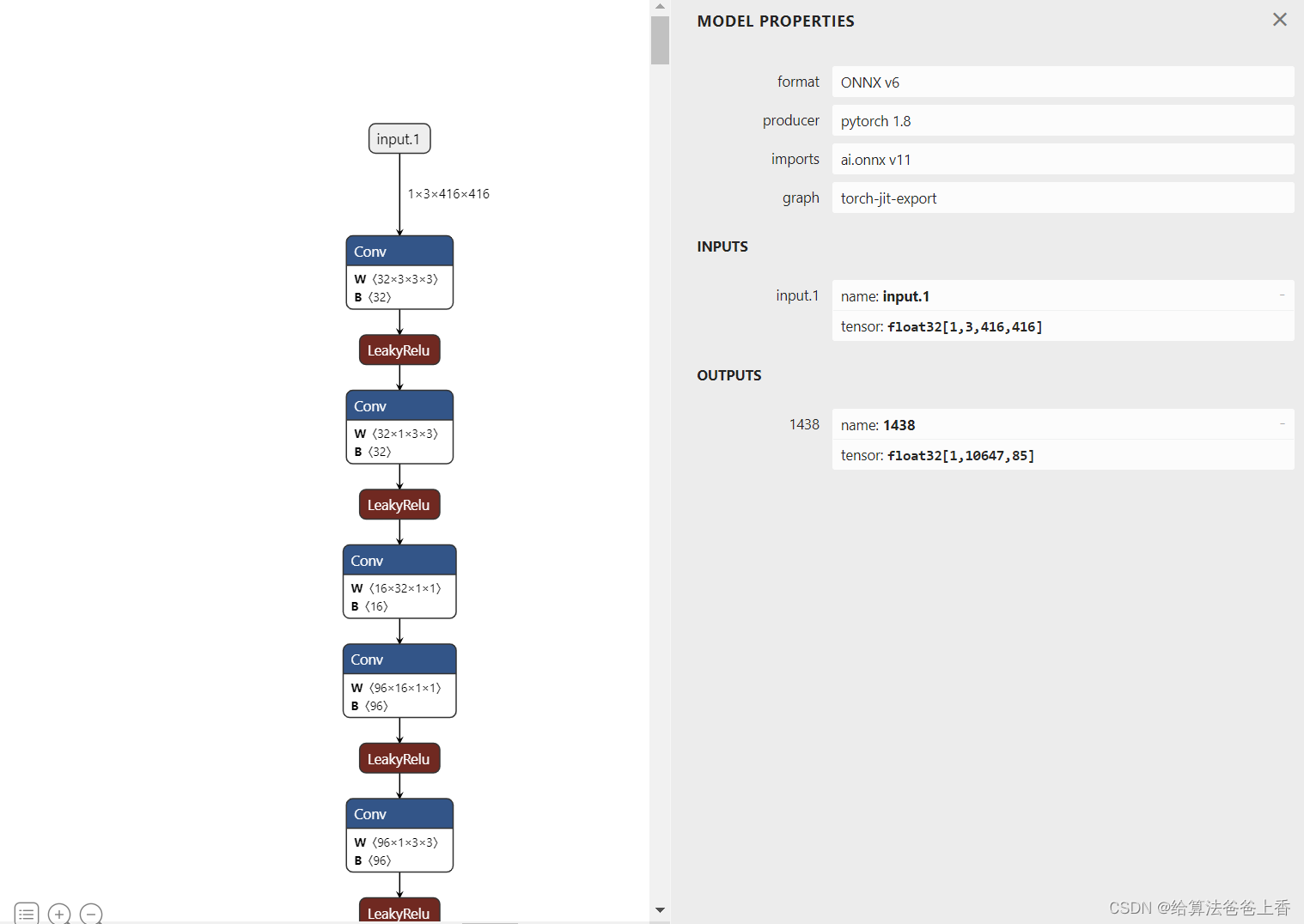
torch.onnx.export(model, (torch.zeros(1, 3, 416, 416),), "out.onnx", opset_version=11)
导出的onnx结构如下:
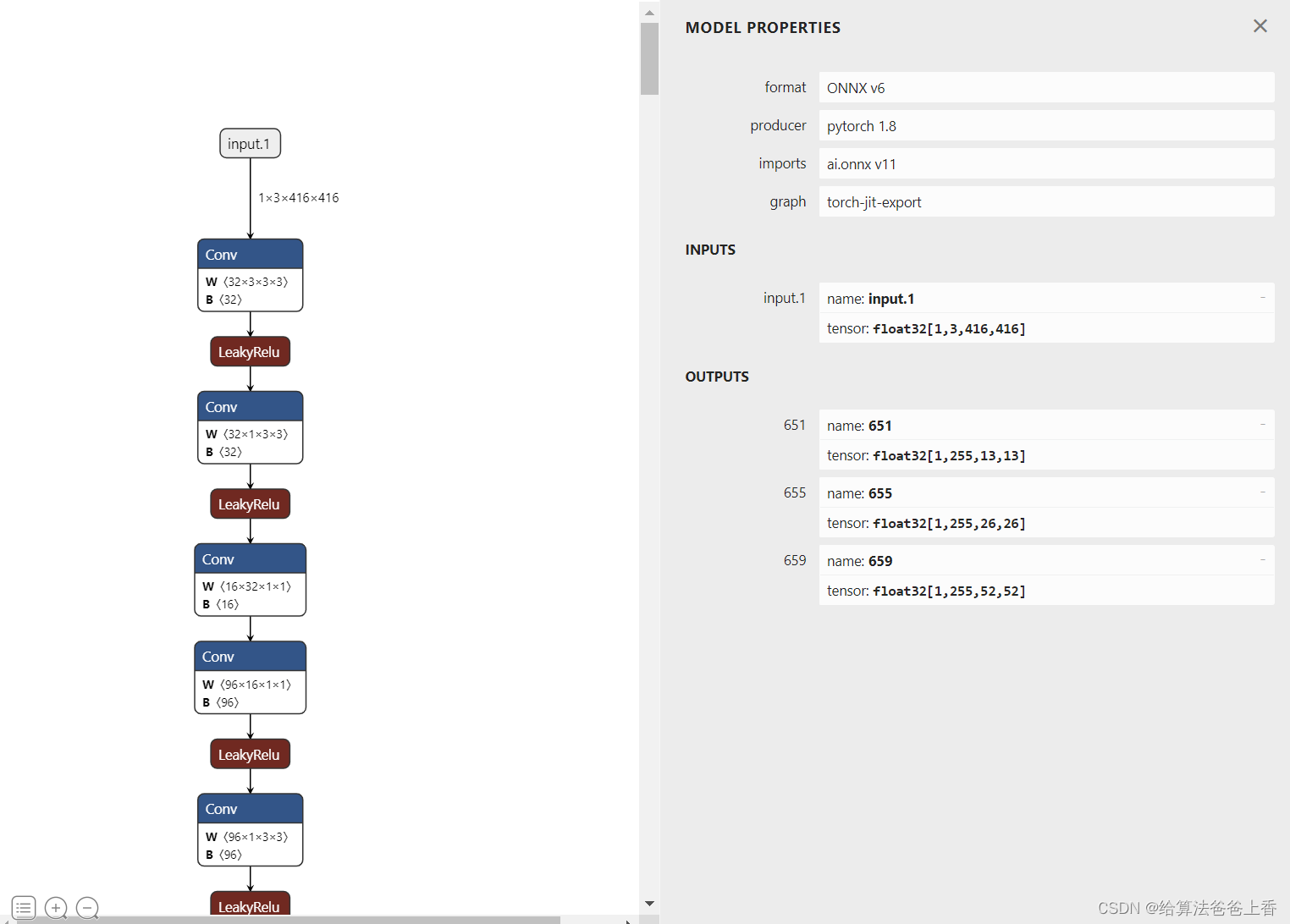
输出是包含三个不同层级检测头的输出。若需要合并检测结果,需要修改脚本如下:
import torch
from itertools import repeat
from mmdet.apis import init_detector, inference_detector
config_file = './configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py'
checkpoint_file = 'yolov3_mobilenetv2_mstrain-416_300e_coco_20210718_010823-f68a07b3.pth'
model = init_detector(config_file, checkpoint_file, device='cpu') # or device='cuda:0'
class YOLOV3(torch.nn.Module):
def __init__(self):
super().__init__()
self.model = init_detector(config_file, checkpoint_file, device='cpu')
self.class_num = 80
self.base_sizes = [[(116, 90), (156, 198), (373, 326)],
[(30, 61), (62, 45), (59, 119)],
[(10, 13), (16, 30), (33, 23)]]
self.stride = [32, 16, 8]
self.strides = [tuple(repeat(x, 2)) for x in self.stride]
self.centers = [(x[0] / 2., x[1] / 2.) for x in self.strides]
self.base_anchors=self.gen_base_anchors()
def gen_base_anchors(self):
multi_level_base_anchors = []
for i, base_sizes_per_level in enumerate(self.base_sizes):
center = self.centers[i]
x_center, y_center = center
base_anchors = []
for base_size in base_sizes_per_level:
w, h = base_size
base_anchor = torch.Tensor([x_center - 0.5 * w, y_center - 0.5 * h, x_center + 0.5 * w, y_center + 0.5 * h])
base_anchors.append(base_anchor)
base_anchors = torch.stack(base_anchors, dim=0)
multi_level_base_anchors.append(base_anchors)
return multi_level_base_anchors
def _meshgrid(self, x, y):
xx = x.repeat(y.shape[0])
yy = y.view(-1, 1).repeat(1, x.shape[0]).view(-1)
return xx, yy
def grid_priors(self, featmap_sizes):
multi_level_anchors = []
for i in range(len(featmap_sizes)):
base_anchors = self.base_anchors[i]
feat_h, feat_w = featmap_sizes[i]
stride_w, stride_h = self.strides[i]
shift_x = torch.arange(0, feat_w) * stride_w
shift_y = torch.arange(0, feat_h) * stride_h
shift_xx, shift_yy = self._meshgrid(shift_x, shift_y)
shifts = torch.stack([shift_xx, shift_yy, shift_xx, shift_yy], dim=-1)
anchors = base_anchors[None, :, :] + shifts[:, None, :]
anchors = anchors.view(-1, 4)
multi_level_anchors.append(anchors)
return multi_level_anchors
def decode(self, bboxes, pred_bboxes, stride):
xy_centers = (bboxes[..., :2] + bboxes[..., 2:]) * 0.5 + (pred_bboxes[..., :2] - 0.5) * stride
whs = (bboxes[..., 2:] - bboxes[..., :2]) * 0.5 * pred_bboxes[..., 2:].exp()
decoded_bboxes = torch.stack((xy_centers[..., 0] - whs[..., 0], xy_centers[..., 1] - whs[..., 1],
xy_centers[..., 0] + whs[..., 0], xy_centers[..., 1] + whs[..., 1]), dim=-1)
return decoded_bboxes
def forward(self, x):
x = self.model.backbone(x)
x = self.model.neck(x)
pred_maps = self.model.bbox_head(x)
flatten_preds = []
flatten_strides = []
for pred, stride in zip(pred_maps[0], self.stride):
pred = pred.permute(0, 2, 3, 1).reshape(1, -1, 5+self.class_num)
pred[..., :2] = pred[..., :2].sigmoid()
flatten_preds.append(pred)
flatten_strides.append(pred.new_tensor(stride).expand(pred.size(1)))
flatten_preds = torch.cat(flatten_preds, dim=1)
flatten_bbox_preds = flatten_preds[..., :4]
flatten_objectness = flatten_preds[..., 4].sigmoid()
flatten_preds[..., 4] = flatten_objectness
flatten_cls_scores = flatten_preds[..., 5:].sigmoid()
flatten_preds[..., 5:] = flatten_cls_scores
featmap_sizes = [pred_map.shape[-2:] for pred_map in pred_maps[0]]
mlvl_anchors = self.grid_priors(featmap_sizes)
flatten_anchors = torch.cat(mlvl_anchors)
flatten_strides = torch.cat(flatten_strides)
flatten_bboxes = self.decode(flatten_anchors, flatten_bbox_preds, flatten_strides.unsqueeze(-1))
flatten_preds[..., :4] = flatten_bboxes
return flatten_preds
model = YOLOV3().eval()
input = torch.zeros(1, 3, 416, 416, device='cpu')
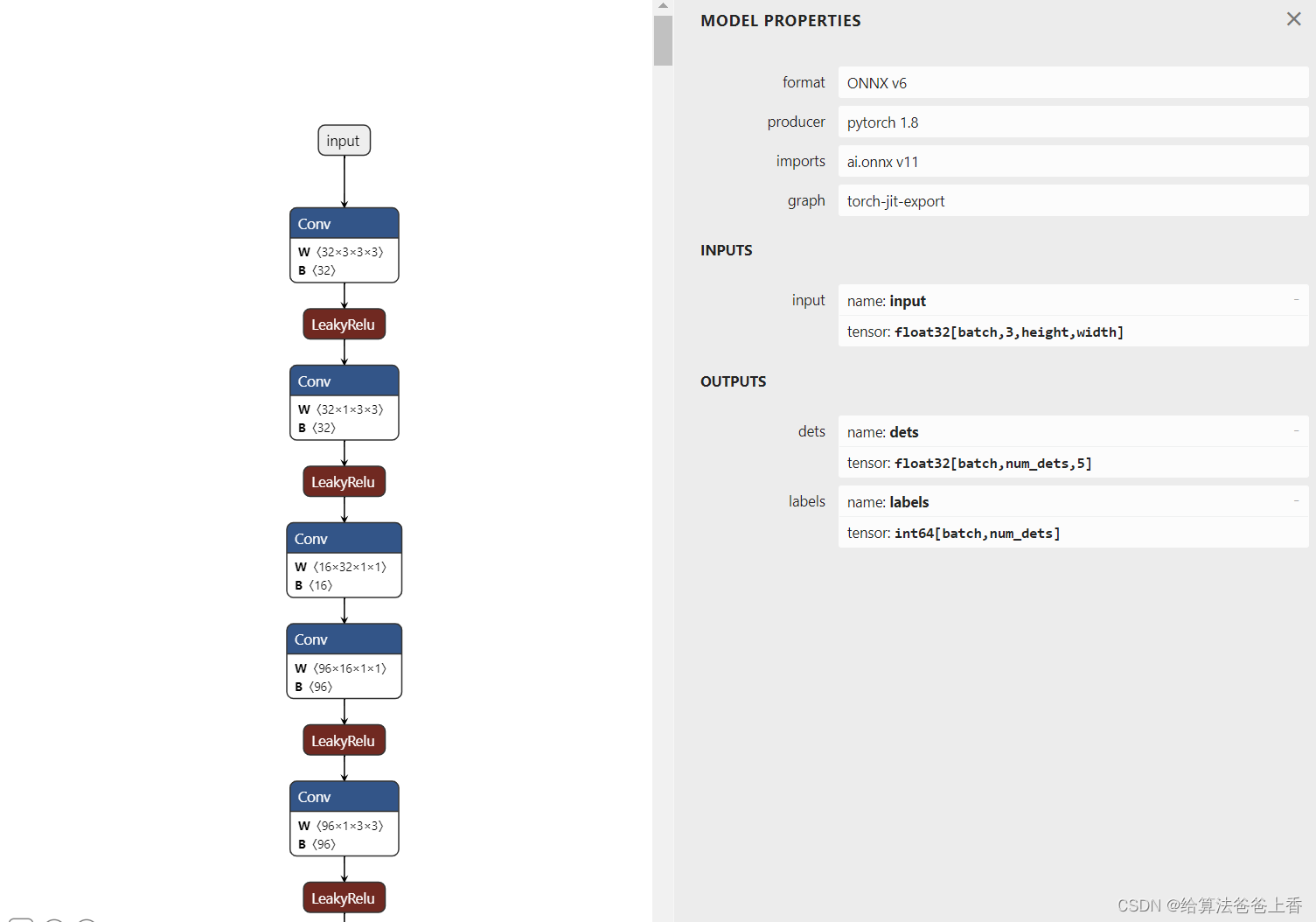
torch.onnx.export(model, input, "out.onnx", opset_version=11)
导出的onnx结构如下:
安装mmdeploy的话,可以通过下面脚本导出onnx模型。
from mmdeploy.apis import torch2onnx
from mmdeploy.backend.sdk.export_info import export2SDK
img = 'bus.jpg'
work_dir = './work_dir/onnx/yolov3'
save_file = './end2end.onnx'
deploy_cfg = 'mmdeploy/configs/mmdet/detection/detection_onnxruntime_dynamic.py'
model_cfg = 'mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py'
model_checkpoint = 'checkpoints/yolov3_mobilenetv2_mstrain-416_300e_coco_20210718_010823-f68a07b3.pth'
device = 'cpu'
# 1. convert model to onnx
torch2onnx(img, work_dir, save_file, deploy_cfg, model_cfg, model_checkpoint, device)
# 2. extract pipeline info for sdk use (dump-info)
export2SDK(deploy_cfg, model_cfg, work_dir, pth=model_checkpoint, device=device)
onnx模型的结构如下:
onnxruntime推理
手动导出的onnx模型使用onnxruntime推理:
import cv2
import numpy as np
import onnxruntime
CLASSES = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush'] #coco80类别
use_letterbox = True
input_shape = (416, 416)
def nms(dets, thresh):
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
areas = (y2 - y1 + 1) * (x2 - x1 + 1)
scores = dets[:, 4]
keep = []
index = scores.argsort()[::-1]
while index.size > 0:
i = index[0]
keep.append(i)
x11 = np.maximum(x1[i], x1[index[1:]])
y11 = np.maximum(y1[i], y1[index[1:]])
x22 = np.minimum(x2[i], x2[index[1:]])
y22 = np.minimum(y2[i], y2[index[1:]])
w = np.maximum(0, x22 - x11 + 1)
h = np.maximum(0, y22 - y11 + 1)
overlaps = w * h
ious = overlaps / (areas[i] + areas[index[1:]] - overlaps)
idx = np.where(ious <= thresh)[0]
index = index[idx + 1]
return keep
def filter_box(org_box, conf_thres, iou_thres): #过滤掉无用的框
org_box = np.squeeze(org_box)
conf = org_box[..., 4] > conf_thres
box = org_box[conf == True]
cls_cinf = box[..., 5:]
cls = []
for i in range(len(cls_cinf)):
cls.append(int(np.argmax(cls_cinf[i])))
all_cls = list(set(cls))
output = []
for i in range(len(all_cls)):
curr_cls = all_cls[i]
curr_cls_box = []
curr_out_box = []
for j in range(len(cls)):
if cls[j] == curr_cls:
box[j][4] *= cls_cinf[j][curr_cls]
box[j][5] = curr_cls
curr_cls_box.append(box[j][:6])
curr_cls_box = np.array(curr_cls_box)
curr_out_box = nms(curr_cls_box,iou_thres)
for k in curr_out_box:
output.append(curr_cls_box[k])
output = np.array(output) #(4, 6)
return output
def letterbox(im, new_shape=(416, 416), color=(114, 114, 114)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = (new_shape[1] - new_unpad[0])/2, (new_shape[0] - new_unpad[1])/2 # wh padding
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im
def scale_boxes(input_shape, boxes, shape):
# Rescale boxes (xyxy) from input_shape to shape
gain = min(input_shape[0] / shape[0], input_shape[1] / shape[1]) # gain = old / new
pad = (input_shape[1] - shape[1] * gain) / 2, (input_shape[0] - shape[0] * gain) / 2 # wh padding
boxes[..., [0, 2]] -= pad[0] # x padding
boxes[..., [1, 3]] -= pad[1] # y padding
boxes[..., :4] /= gain
boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2
boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2
return boxes
def draw(image, box_data):
box_data = scale_boxes(input_shape, box_data, image.shape)
boxes = box_data[...,:4].astype(np.int32)
scores = box_data[...,4]
classes = box_data[...,5].astype(np.int32)
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
print('class: {}, score: {}, coordinate: [{}, {}, {}, {}]'.format(CLASSES[cl], score, top, left, right, bottom))
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 1)
cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score), (top, left), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 1)
if __name__=="__main__":
img = cv2.imread('bus.jpg')
if use_letterbox:
input = letterbox(img, input_shape)
else:
input = cv2.resize(img, input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1).astype(dtype=np.float32) #BGR2RGB和HWC2CHW
input[0,:] = (input[0,:] - 123.675) / 58.395
input[1,:] = (input[1,:] - 116.28) / 57.12
input[2,:] = (input[2,:] - 103.53) / 57.375
input = np.expand_dims(input, axis=0)
onnx_session = onnxruntime.InferenceSession('yolov3.onnx', providers=['CPUExecutionProvider'])
input_name=[]
for node in onnx_session.get_inputs():
input_name.append(node.name)
output_name=[]
for node in onnx_session.get_outputs():
output_name.append(node.name)
input_feed={}
for name in input_name:
input_feed[name] = input
pred = onnx_session.run(None, input_feed)
outbox = filter_box(pred, 0.5, 0.5)
draw(img, outbox)
cv2.imwrite('res.jpg', img)
mmdeploy导出的onnx模型使用onnxruntime推理:
import cv2
import numpy as np
import onnxruntime
CLASSES = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush'] #coco80类别
use_letterbox = True
input_shape = (416, 416)
def filter_box(org_box, conf_thres): #删除置信度小于conf_thres的BOX
flag = org_box[0][..., 4] > conf_thres
box = org_box[0][flag == True]
cls = org_box[1][flag == True].reshape(-1, 1)
output = np.concatenate((box, cls), axis=1)
return output
def letterbox(im, new_shape=(416, 416), color=(114, 114, 114)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = (new_shape[1] - new_unpad[0])/2, (new_shape[0] - new_unpad[1])/2 # wh padding
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im
def scale_boxes(input_shape, boxes, shape):
# Rescale boxes (xyxy) from input_shape to shape
gain = min(input_shape[0] / shape[0], input_shape[1] / shape[1]) # gain = old / new
pad = (input_shape[1] - shape[1] * gain) / 2, (input_shape[0] - shape[0] * gain) / 2 # wh padding
boxes[..., [0, 2]] -= pad[0] # x padding
boxes[..., [1, 3]] -= pad[1] # y padding
boxes[..., :4] /= gain
boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2
boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2
return boxes
def draw(image, box_data):
box_data = scale_boxes(input_shape, box_data, image.shape)
boxes = box_data[...,:4].astype(np.int32)
scores = box_data[...,4]
classes = box_data[...,5].astype(np.int32)
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
print('class: {}, score: {}, coordinate: [{}, {}, {}, {}]'.format(CLASSES[cl], score, top, left, right, bottom))
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 1)
cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score), (top, left), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 1)
if __name__=="__main__":
img = cv2.imread('bus.jpg')
if use_letterbox:
input = letterbox(img, input_shape)
else:
input = cv2.resize(img, input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1).astype(dtype=np.float32) #BGR2RGB和HWC2CHW
input[0,:] = (input[0,:] - 123.675) / 58.395
input[1,:] = (input[1,:] - 116.28) / 57.12
input[2,:] = (input[2,:] - 103.53) / 57.375
input = np.expand_dims(input, axis=0)
onnx_session = onnxruntime.InferenceSession('../work_dir/onnx/yolov3/end2end.onnx', providers=['CPUExecutionProvider'])
input_name=[]
for node in onnx_session.get_inputs():
input_name.append(node.name)
output_name=[]
for node in onnx_session.get_outputs():
output_name.append(node.name)
input_feed={}
for name in input_name:
input_feed[name] = input
pred = onnx_session.run(None, input_feed)
outbox = filter_box(pred, 0.5)
draw(img, outbox)
cv2.imwrite('res.jpg', img)
直接使用mmdeploy的api推理:
from mmdeploy.apis import inference_model
model_cfg = 'mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py'
deploy_cfg = 'mmdeploy/configs/mmdet/detection/detection_onnxruntime_dynamic.py'
img = 'bus.jpg'
backend_files = ['work_dir/onnx/yolov3/end2end.onnx']
device = 'cpu'
result = inference_model(model_cfg, deploy_cfg, backend_files, img, device)
print(result)
或者
from mmdeploy_runtime import Detector
import cv2
# 读取图片
img = cv2.imread('bus.jpg')
# 创建检测器
detector = Detector(model_path='work_dir/onnx/yolov3', device_name='cpu')
# 执行推理
bboxes, labels, _ = detector(img)
# 使用阈值过滤推理结果,并绘制到原图中
indices = [i for i in range(len(bboxes))]
for index, bbox, label_id in zip(indices, bboxes, labels):
[left, top, right, bottom], score = bbox[0:4].astype(int), bbox[4]
if score < 0.3:
continue
cv2.rectangle(img, (left, top), (right, bottom), (0, 255, 0))
cv2.imwrite('output_detection.png', img)
导出engine文件
这里通过trtexec转换onnx文件,LZ的版本是TensorRT-8.2.1.8。
./trtexec.exe --onnx=yolov3.onnx --saveEngine=yolov3.engine --workspace=20480
tensorrt推理
手动导出的模型使用tensorrt推理:
import cv2
import numpy as np
import tensorrt as trt
import pycuda.autoinit
import pycuda.driver as cuda
CLASSES = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush'] #coco80类别
use_letterbox = True
input_shape = (416, 416)
def nms(dets, thresh):
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
areas = (y2 - y1 + 1) * (x2 - x1 + 1)
scores = dets[:, 4]
keep = []
index = scores.argsort()[::-1]
while index.size > 0:
i = index[0]
keep.append(i)
x11 = np.maximum(x1[i], x1[index[1:]])
y11 = np.maximum(y1[i], y1[index[1:]])
x22 = np.minimum(x2[i], x2[index[1:]])
y22 = np.minimum(y2[i], y2[index[1:]])
w = np.maximum(0, x22 - x11 + 1)
h = np.maximum(0, y22 - y11 + 1)
overlaps = w * h
ious = overlaps / (areas[i] + areas[index[1:]] - overlaps)
idx = np.where(ious <= thresh)[0]
index = index[idx + 1]
return keep
def filter_box(org_box, conf_thres, iou_thres): #过滤掉无用的框
org_box = np.squeeze(org_box)
conf = org_box[..., 4] > conf_thres
box = org_box[conf == True]
cls_cinf = box[..., 5:]
cls = []
for i in range(len(cls_cinf)):
cls.append(int(np.argmax(cls_cinf[i])))
all_cls = list(set(cls))
output = []
for i in range(len(all_cls)):
curr_cls = all_cls[i]
curr_cls_box = []
curr_out_box = []
for j in range(len(cls)):
if cls[j] == curr_cls:
box[j][4] *= cls_cinf[j][curr_cls]
box[j][5] = curr_cls
curr_cls_box.append(box[j][:6])
curr_cls_box = np.array(curr_cls_box)
curr_out_box = nms(curr_cls_box,iou_thres)
for k in curr_out_box:
output.append(curr_cls_box[k])
output = np.array(output) #(4, 6)
return output
def letterbox(im, new_shape=(416, 416), color=(114, 114, 114)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = (new_shape[1] - new_unpad[0])/2, (new_shape[0] - new_unpad[1])/2 # wh padding
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im
def scale_boxes(input_shape, boxes, shape):
# Rescale boxes (xyxy) from input_shape to shape
gain = min(input_shape[0] / shape[0], input_shape[1] / shape[1]) # gain = old / new
pad = (input_shape[1] - shape[1] * gain) / 2, (input_shape[0] - shape[0] * gain) / 2 # wh padding
boxes[..., [0, 2]] -= pad[0] # x padding
boxes[..., [1, 3]] -= pad[1] # y padding
boxes[..., :4] /= gain
boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2
boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2
return boxes
def draw(image, box_data):
box_data = scale_boxes(input_shape, box_data, image.shape)
boxes = box_data[...,:4].astype(np.int32)
scores = box_data[...,4]
classes = box_data[...,5].astype(np.int32)
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
print('class: {}, score: {}, coordinate: [{}, {}, {}, {}]'.format(CLASSES[cl], score, top, left, right, bottom))
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 1)
cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score), (top, left), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 1)
if __name__=="__main__":
logger = trt.Logger(trt.Logger.WARNING)
with open("yolov3.engine", "rb") as f, trt.Runtime(logger) as runtime:
engine = runtime.deserialize_cuda_engine(f.read())
context = engine.create_execution_context()
h_input = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(0)), dtype=np.float32)
h_output = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(1)), dtype=np.float32)
d_input = cuda.mem_alloc(h_input.nbytes)
d_output = cuda.mem_alloc(h_output.nbytes)
stream = cuda.Stream()
img = cv2.imread('bus.jpg')
if use_letterbox:
input = letterbox(img, input_shape)
else:
input = cv2.resize(img, input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1).astype(dtype=np.float32) #BGR2RGB和HWC2CHW
input[0,:] = (input[0,:] - 123.675) / 58.395
input[1,:] = (input[1,:] - 116.28) / 57.12
input[2,:] = (input[2,:] - 103.53) / 57.375
input = np.expand_dims(input, axis=0)
np.copyto(h_input, input.ravel())
with engine.create_execution_context() as context:
cuda.memcpy_htod_async(d_input, h_input, stream)
context.execute_async_v2(bindings=[int(d_input), int(d_output)], stream_handle=stream.handle)
cuda.memcpy_dtoh_async(h_output, d_output, stream)
stream.synchronize()
pred = h_output.reshape(1, 10647, 85)
outbox = filter_box(pred, 0.5, 0.5)
draw(img, outbox)
cv2.imwrite('res.jpg', img)
使用mmdeploy的api推理:
from mmdeploy.apis import inference_model
model_cfg ='mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py'
deploy_cfg = 'mmdeploy/configs/mmdet/detection/detection_tensorrt_static-320x320.py'
img = 'bus.jpg'
backend_files = ['work_dir/trt/yolov3/end2end.engine']
device = 'cuda'
result = inference_model(model_cfg, deploy_cfg, backend_files, img, device)
print(result)
或者
from mmdeploy_runtime import Detector
import cv2
# 读取图片
img = cv2.imread('bus.jpg')
# 创建检测器
detector = Detector(model_path='work_dir/trt/yolox', device_name='cuda')
# 执行推理
bboxes, labels, _ = detector(img)
# 使用阈值过滤推理结果,并绘制到原图中
indices = [i for i in range(len(bboxes))]
for index, bbox, label_id in zip(indices, bboxes, labels):
[left, top, right, bottom], score = bbox[0:4].astype(int), bbox[4]
if score < 0.3:
continue
cv2.rectangle(img, (left, top), (right, bottom), (0, 255, 0))
cv2.imwrite('output_detection.png', img)