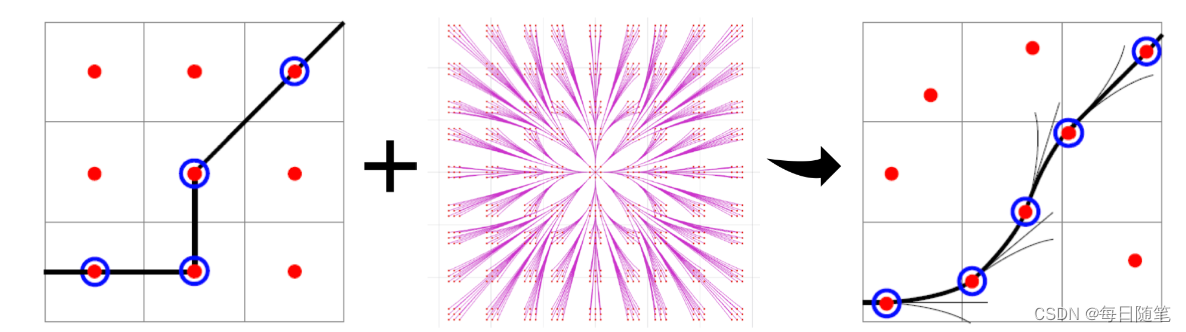
混合A Star算法就是将A*与Lattice Graph相关联。
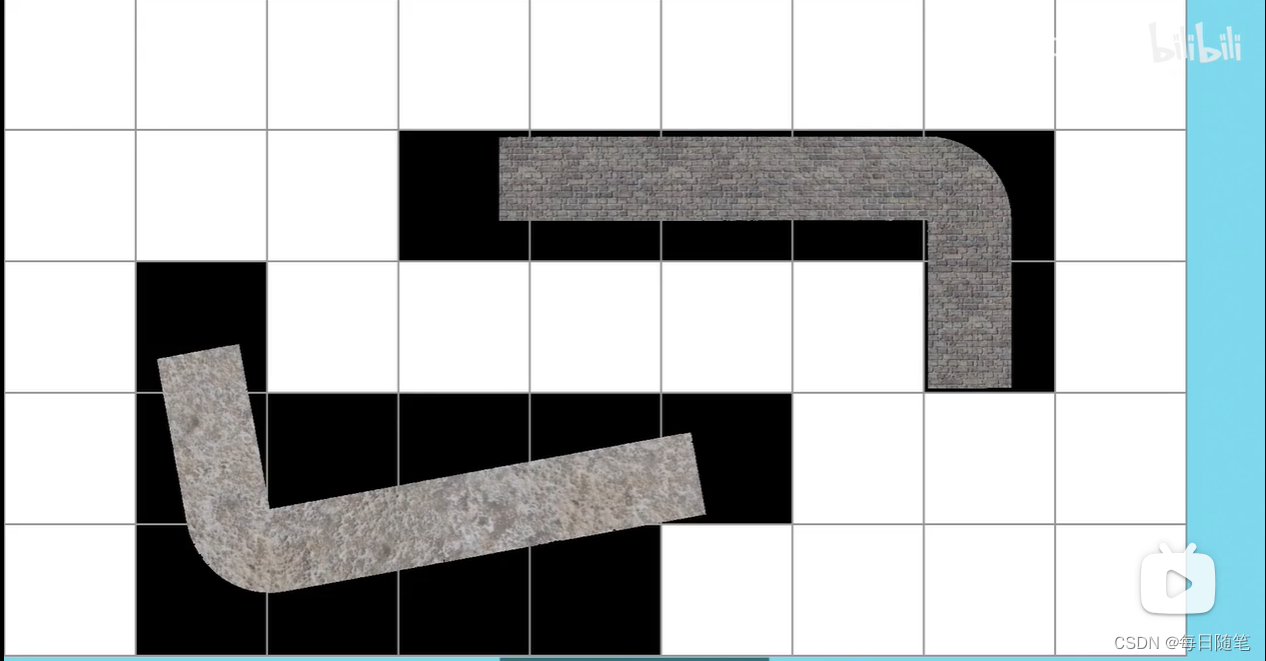
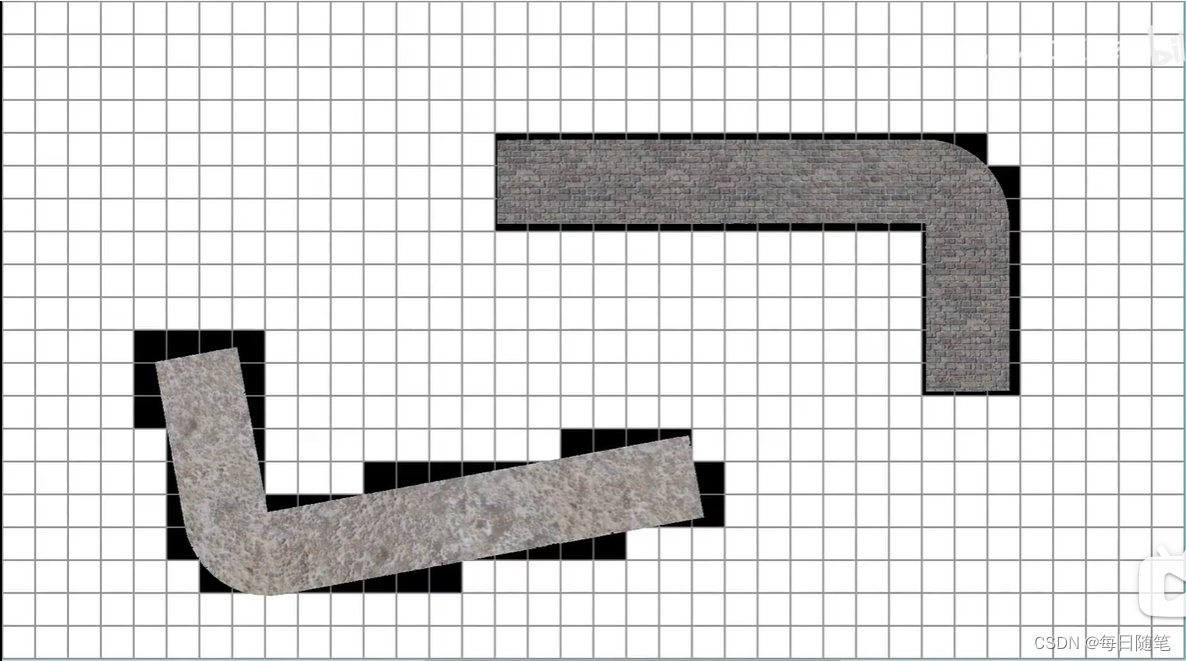
使用栅格地图,保持在栅格地图的这个节点方格里都只记录一个机器人的State,例如图上的弯弯的线,进行剪枝,看一个节点的Cost(时间、消耗的能量、路径的长度、终端状态惩罚项的累加等等)。如果新的节点比老节点的Cost要少,就进行更新,从一个网格中找出最优的节点。
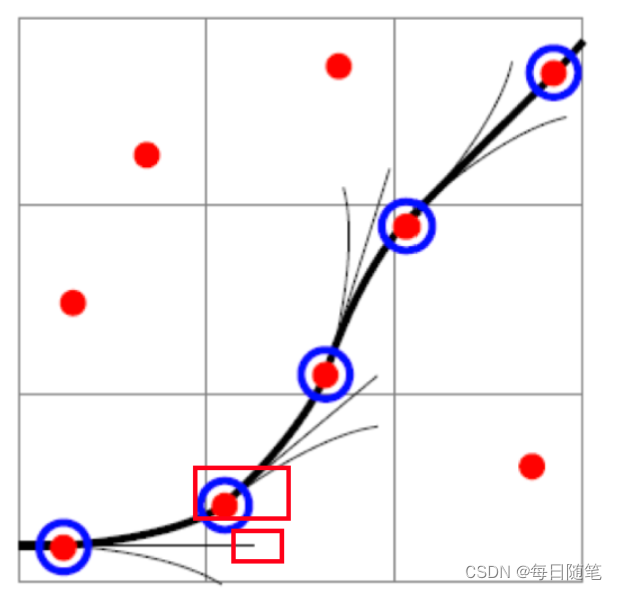
混合A算法产生的路径并非最优的,需要进行两个阶段进行优化:
1.对轨迹上的顶点进行非线性优化,以改善解的长度和平滑度。
2.执行非参数插值。