OpenCV-Python小应用(八):判断是否有深色线条
- 前言
- 前提条件
- 相关介绍
- 实验环境
- 判断是否有深色线条
- 思路一:通过图像梯度直方图判断
- 思路二:通过图像灰度值变化判断
- 参考
前言
- 由于本人水平有限,难免出现错漏,敬请批评改正。
- 更多精彩内容,可点击进入Python日常小操作专栏、OpenCV-Python小应用专栏、YOLO系列专栏、自然语言处理专栏或我的个人主页查看
- 基于DETR的人脸伪装检测
- YOLOv7训练自己的数据集(口罩检测)
- YOLOv8训练自己的数据集(足球检测)
- YOLOv5:TensorRT加速YOLOv5模型推理
- YOLOv5:IoU、GIoU、DIoU、CIoU、EIoU
- 玩转Jetson Nano(五):TensorRT加速YOLOv5目标检测
- YOLOv5:添加SE、CBAM、CoordAtt、ECA注意力机制
- YOLOv5:yolov5s.yaml配置文件解读、增加小目标检测层
- Python将COCO格式实例分割数据集转换为YOLO格式实例分割数据集
- YOLOv5:使用7.0版本训练自己的实例分割模型(车辆、行人、路标、车道线等实例分割)
- 使用Kaggle GPU资源免费体验Stable Diffusion开源项目
前提条件
- 熟悉Python
相关介绍
- Python是一种跨平台的计算机程序设计语言。是一个高层次的结合了解释性、编译性、互动性和面向对象的脚本语言。最初被设计用于编写自动化脚本(shell),随着版本的不断更新和语言新功能的添加,越多被用于独立的、大型项目的开发。
- OpenCV是一个基于Apache2.0许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在Linux、Windows、Android和Mac OS操作系统上。它轻量级而且高效——由一系列C函数和少量C++类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
- OpenCV用C++语言编写,它具有C++、Python、Java和MATLAB接口,并支持Windows、Linux、Android和Mac OS,OpenCV主要倾向于实时视觉应用,并在可用时利用MMX和SSE指令。
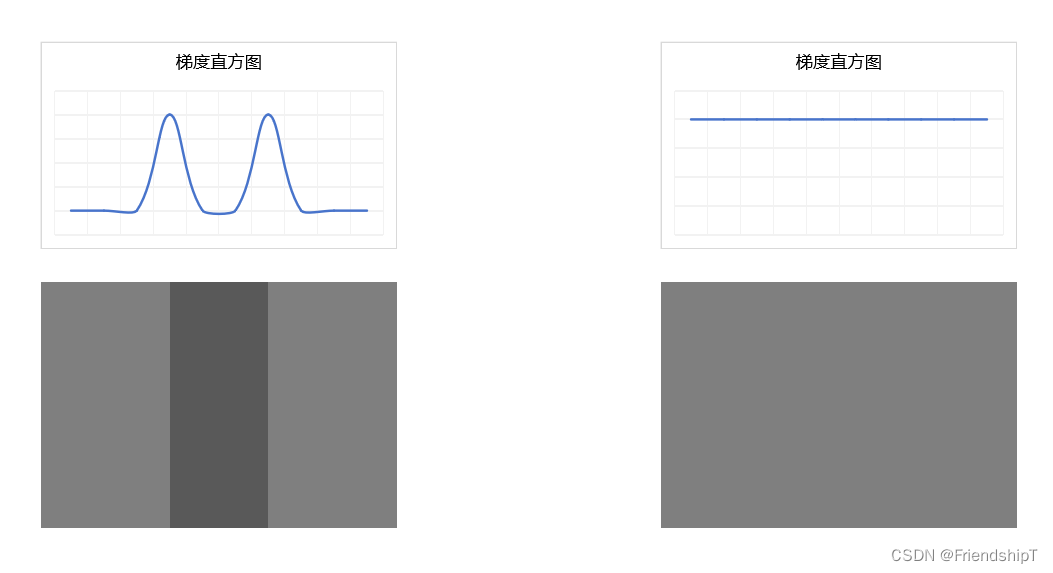
- 图像梯度是指图像中灰度变化的速度,反映了图像的边缘信息。在图像处理中,我们可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导。
- 在一幅模糊图像中的物体的轮廓不明显,轮廓边缘灰度变化不强烈,从而导致层次感不强,而在清晰图片中的物体轮廓边缘灰度变化明显,层次感强。因此,我们引入的图像梯度可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导。
- 在上边这幅图中可以看出,如果一副图像的相邻灰度值有变化,那么梯度就存在,如果图像相邻的像素没有变化,那么梯度就是0,把梯度值和相应的像素相加,那么灰度值没有变化的,像素就没有变化,灰度值变了,像素值也就变了。
- 一些经典的图像梯度算法是考虑图像的每个像素的某个邻域内的灰度变化,利用边缘临近的一阶或二阶导数变化规律,对原始图像中像素某个邻域设置梯度算子,通常我们用小区域模板进行卷积来计算,有Sobel算子、Robinson算子、Laplace算子等。
- 图像的灰度值是指图像中每个像素的亮度值,通常用于黑白图像。灰度值的范围通常是0到255,其中0表示黑色,255表示白色。在计算机视觉中,灰度图像是由纯黑和纯白来过渡得到的,在黑色中加入白色就得到灰色,纯黑和纯白按不同的比例来混合就得到不同的灰度值。
- 在灰度图像中,每个像素的颜色值都是灰度值,指黑白图像中点的颜色深度,范围一般从0到255,白色为255,黑色为0。在灰度图像中,每个像素只有一个采样颜色的图像,这类图像通常显示为从最暗黑色到最亮的白色的灰度,尽管理论上这个采样可以任何颜色的不同深浅,甚至可以是不同亮度上的不同颜色。
实验环境
- Python 3.6.13 (面向对象的高级语言)
- OpenCV 3.4.10(python第三方库)
pip3 install opencv-python==3.4.10.37
判断是否有深色线条
思路一:通过图像梯度直方图判断
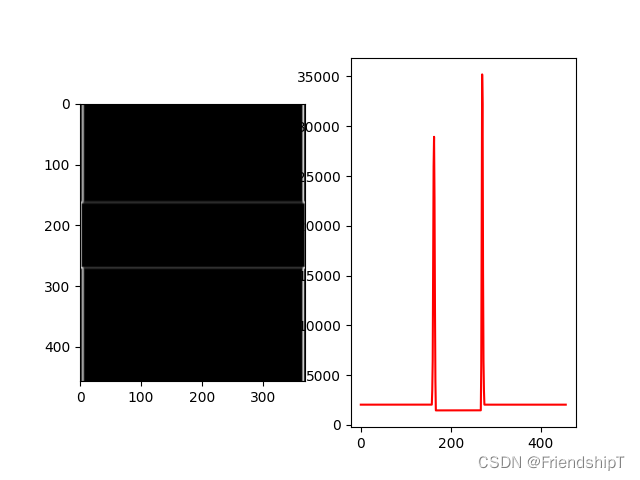
- 基本思路:对图像进行梯度计算,得到的梯度图像,进行每一行梯度值的统计,得到梯度直方图。如果梯度直方图有一定数量的高峰(这里阈值条件为高峰数量len(lst) > 3),则认为有深色线条,否则,认为无深色线条。
- 图像梯度相关知识点,可查阅OpenCV-Python快速入门(七):边缘检测
import cv2
import matplotlib.pyplot as plt
import numpy as np
def get_magnitude(img):
'''
param:
img 图像数组
return:
magnitude 图像梯度
'''
# 高斯模糊,平滑
Blur = cv2.GaussianBlur(img, (3, 3), 0, sigmaY=0, borderType=cv2.BORDER_REPLICATE)
# 计算图像x方向梯度
sobel_dx = cv2.Sobel(Blur, cv2.CV_32F, 1, 0, ksize=3, scale=1, delta=0, borderType=cv2.BORDER_REPLICATE)
# 计算图像y方向梯度
sobel_dy = cv2.Sobel(Blur, cv2.CV_32F, 0, 1, ksize=3, scale=1, delta=0, borderType=cv2.BORDER_REPLICATE)
# 得到图像梯度
magnitude = np.sqrt(sobel_dx * sobel_dx + sobel_dy * sobel_dy) # 梯度幅值
# cv2.imshow("magnitude",magnitude)
# cv2.waitKey()
# cv2.destroyAllWindows()
return magnitude
if __name__ == "__main__":
img = cv2.imread('3.png',0)
magnitude = get_magnitude(img)
print(magnitude)
X_sum=np.sum(magnitude,axis=1)
lst = list(filter(lambda x : x > 10000,X_sum))
print(lst)
if len(lst) > 3:
print(True)
else:
print(False)
x=np.arange(0,len(X_sum)) # x轴坐标值# print('x.shape:'x.shape)
plt.figure()
plt.subplot(1, 2, 1)
plt.imshow(magnitude,cmap='gray')
plt.subplot(1, 2, 2)
plt.plot(x,X_sum,c ='r') # 参数c为color简写,表示颜色,r为red即红色# plt.show() # 显示图像
plt.show()
True
思路二:通过图像灰度值变化判断
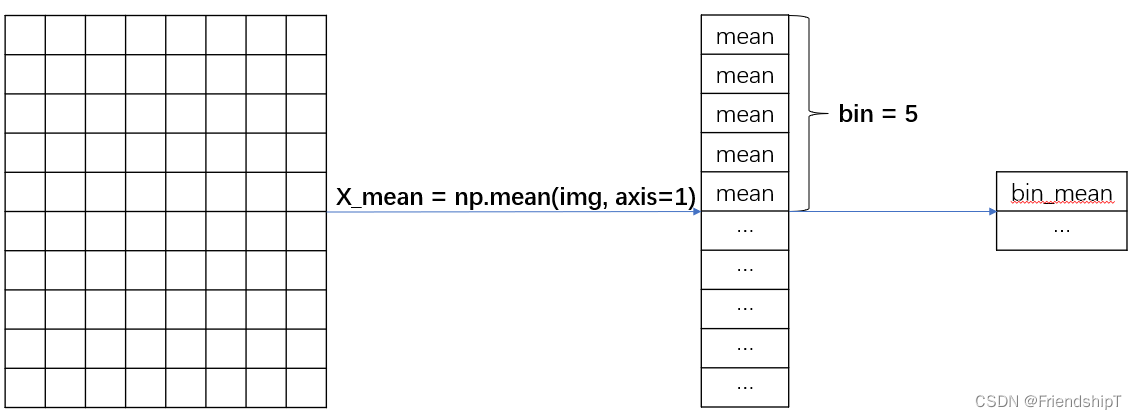
- 基本思路:对图像的每一行求均值,对每一行均值以bin=5为一组,得到bin_mean,对每个相邻的bin_mean做差,如果差值大于一定阈值(这里阈值条件为max_dif > 3),则认为有深色线条,否则,认为无深色线条。
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('3.png',0)
X_mean = np.mean(img, axis=1)
print(X_mean.shape)
bin = 5
start = 0
lenght = len(X_mean)
bin_means = []
while start < lenght:
end = start + bin
if end > lenght:
bin_mean = np.mean(X_mean[start:lenght])
else:
bin_mean = np.mean(X_mean[start:end])
start += bin
bin_means.append(bin_mean)
dif = abs(np.diff(np.array(bin_means))) # 相邻
max_dif = np.max(dif)
print(max_dif)
if max_dif > 3:
print(True)
else:
print(False)
True
参考
[1] https://opencv.org/
[2] 李立宗. OpenCV轻松入门:面向Python. 北京: 电子工业出版社,2019
- 由于本人水平有限,难免出现错漏,敬请批评改正。
- 更多精彩内容,可点击进入Python日常小操作专栏、OpenCV-Python小应用专栏、YOLO系列专栏、自然语言处理专栏或我的个人主页查看
- 基于DETR的人脸伪装检测
- YOLOv7训练自己的数据集(口罩检测)
- YOLOv8训练自己的数据集(足球检测)
- YOLOv5:TensorRT加速YOLOv5模型推理
- YOLOv5:IoU、GIoU、DIoU、CIoU、EIoU
- 玩转Jetson Nano(五):TensorRT加速YOLOv5目标检测
- YOLOv5:添加SE、CBAM、CoordAtt、ECA注意力机制
- YOLOv5:yolov5s.yaml配置文件解读、增加小目标检测层
- Python将COCO格式实例分割数据集转换为YOLO格式实例分割数据集
- YOLOv5:使用7.0版本训练自己的实例分割模型(车辆、行人、路标、车道线等实例分割)
- 使用Kaggle GPU资源免费体验Stable Diffusion开源项目