https://cvlab-unibo.github.io/xnerf-web
intro
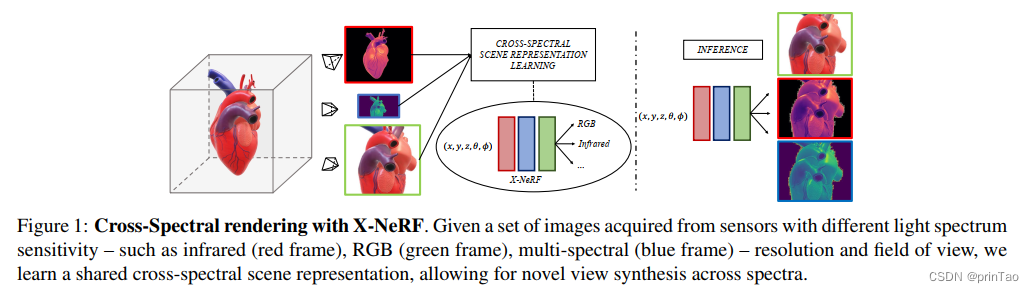
从不同的light spectrum sensitivity获取信息,同时需要obtain a unified Cross-Spectral
scene representation – allowing for querying, for any single point, any of the information sensed across spectra。
存在的问题:
- The need for knowing exact camera poses for any of the images acquired from the different cameras and used to train NeRF
- Differences between sensors – resolution, field of view (FoV)