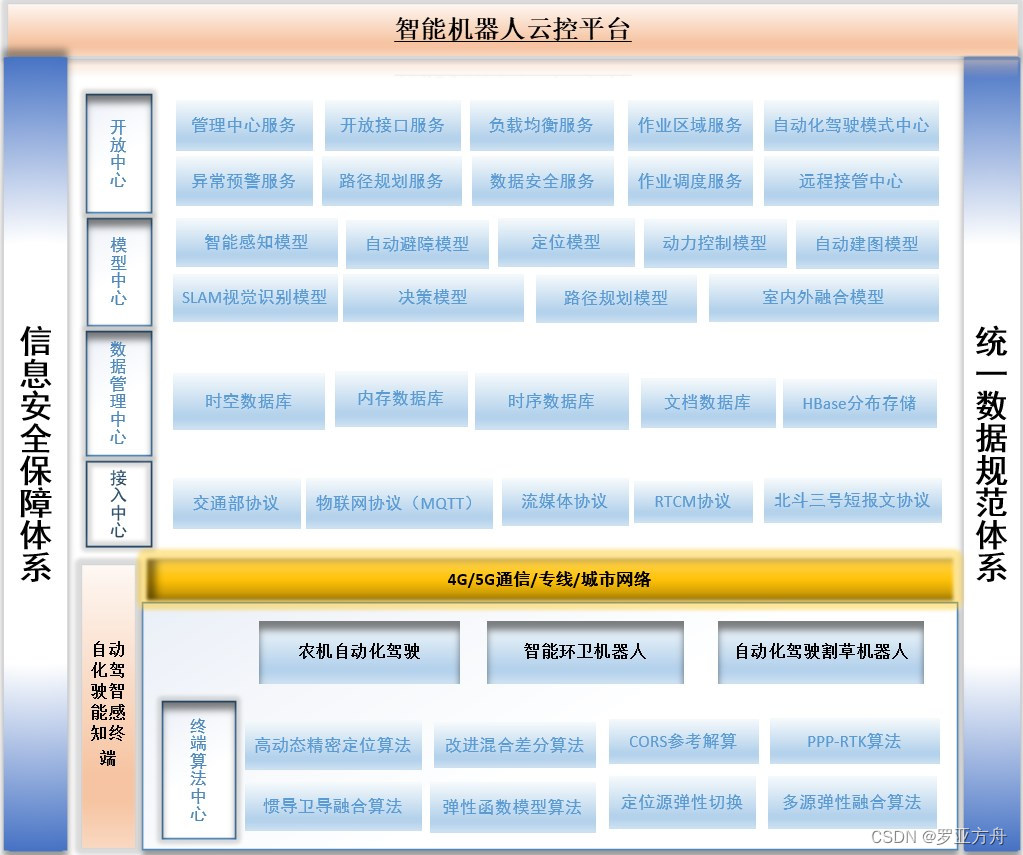
智能机器人云控平台主要是通过打造一个低速固定场景下的机器人自主完成既定作业的模式。整体平台融合的自动化驾驶感知终端,物联网通信,数据接入中心,数据管理中心,模型中心及开放中心等,以一个云平台来掌控多个多种不同场景的机器人作业,通过云端下发控制命令和作业计划,智能终端通过北斗高精度定位、路径规划模型、智能感知模型、实现远程路径规划及避障,动力控制,自主完成既定作业目标。整体架构图如下:
自动驾驶技术主要依赖于多种模型和算法来实现车辆的感知、决策和控制。
- 感知模型:感知模型用于识别和理解车辆周围的环境,包括物体检测、目标跟踪、语义分割等。常见的感知模型包括卷积神经网络(CNN)、循环神经网络(RNN)和其变种,如YOLO(You Only Look Once)、Faster R-CNN等。
目前已经掌握卷积神经网络(CNN)和循环神经网络(RNN)两个模式。
- 定位与地图模型:定位和地图模型用于确定车辆在道路网络中的位置,并构建高精度地图。在自动驾驶中,常用的定位技术包括全球定位系统(北斗)、惯性导航系统(INS)以及视觉SLAM(Simultaneous Localization and Mapping)等。
目前已经掌握,并且应用到农机自动化驾驶上面实现了自动化驾驶AB线。
- 决策与规划模型:决策与规划模型负责根据感知模型的输出和当前路况,制定车辆的行驶策略和路径规划。常见的决策与规划方法包括基于有限状态机(FSM)的规划、基于强化学习的决策方法、以及基于深度学习的端到端规划方法等。
目前还比较欠缺。
- 控制模型:控制模型负责将规划好的路径转化为具体的车辆控制指令,包括转向、加速、刹车等。常见的控制方法包括PID控制器、模型预测控制(MPC)以及最优控制理论等。
目前还在做技术攻关中。
机器人控制模型是指用于实现机器人运动和行为控制的数学模型和算法。以下是一些常见的机器人控制模型:
- PID控制器:PID(Proportional-Integral-Derivative)控制器是最常见的控制器之一,通过比例、积分和微分三个部分对误差信号进行处理,从而实现对机器人运动的控制。
目前还在做技术攻关中。
- 轨迹跟踪控制:用于使机器人沿着预先规划好的路径进行运动,常见的方法包括基于经典控制理论的方法以及基于优化算法的方法。
目前已经掌握,并且应用到农机自动化驾驶上面实现了自动化驾驶AB线。
- 动力学模型:描述机器人运动学和动力学规律的数学模型,用于预测机器人在外部力或环境变化下的响应,包括正向和逆向动力学模型。
目前还比较欠缺,按照调研要求采用QGroundControl(QGC)模型。
- 运动规划:通过路径规划和轨迹生成来确定机器人在给定环境中的运动轨迹,常见的算法包括A*算法、Dijkstra算法、RRT(Rapidly-exploring Random Tree)算法等。
目前还比较欠缺,按照调研要求采用QGroundControl(QGC)模型。
- 姿态控制:用于控制机器人姿态(包括姿势和方向),例如保持稳定飞行的无人机姿态控制。
目前还比较欠缺,按照调研要求采用QGroundControl(QGC)模型。
- 力/力矩控制:用于实现对机器人在空间中的力和力矩的精确控制,包括基于传统控制理论的方法和基于现代控制理论的方法。
目前还比较欠缺。
- 学习控制:包括强化学习、深度强化学习等方法,用于训练机器人在特定任务中做出决策和行为。
目前还比较欠缺。
这些控制模型和算法在机器人领域中起着关键作用,通过它们可以实现对机器人运动和行为的精确控制,进而完成各种不同的任务和应用。随着人工智能和自动化技术的发展,还会涌现出更多新颖的机器人控制模型和算法。
制作一个割草机器人需要考虑机械结构、电子控制系统和导航系统等多个方面。以下是制作割草机器人的一般步骤:
- 机械结构设计:首先需要设计机器人的外形结构和底盘,包括安装割草刀具的位置、底盘的悬挂装置、驱动轮等。机器人的结构设计应该考虑到机动性、稳定性和工作效率。
目前外形结构和底盘已经具备,主要缺少割草刀具的设计及改造。
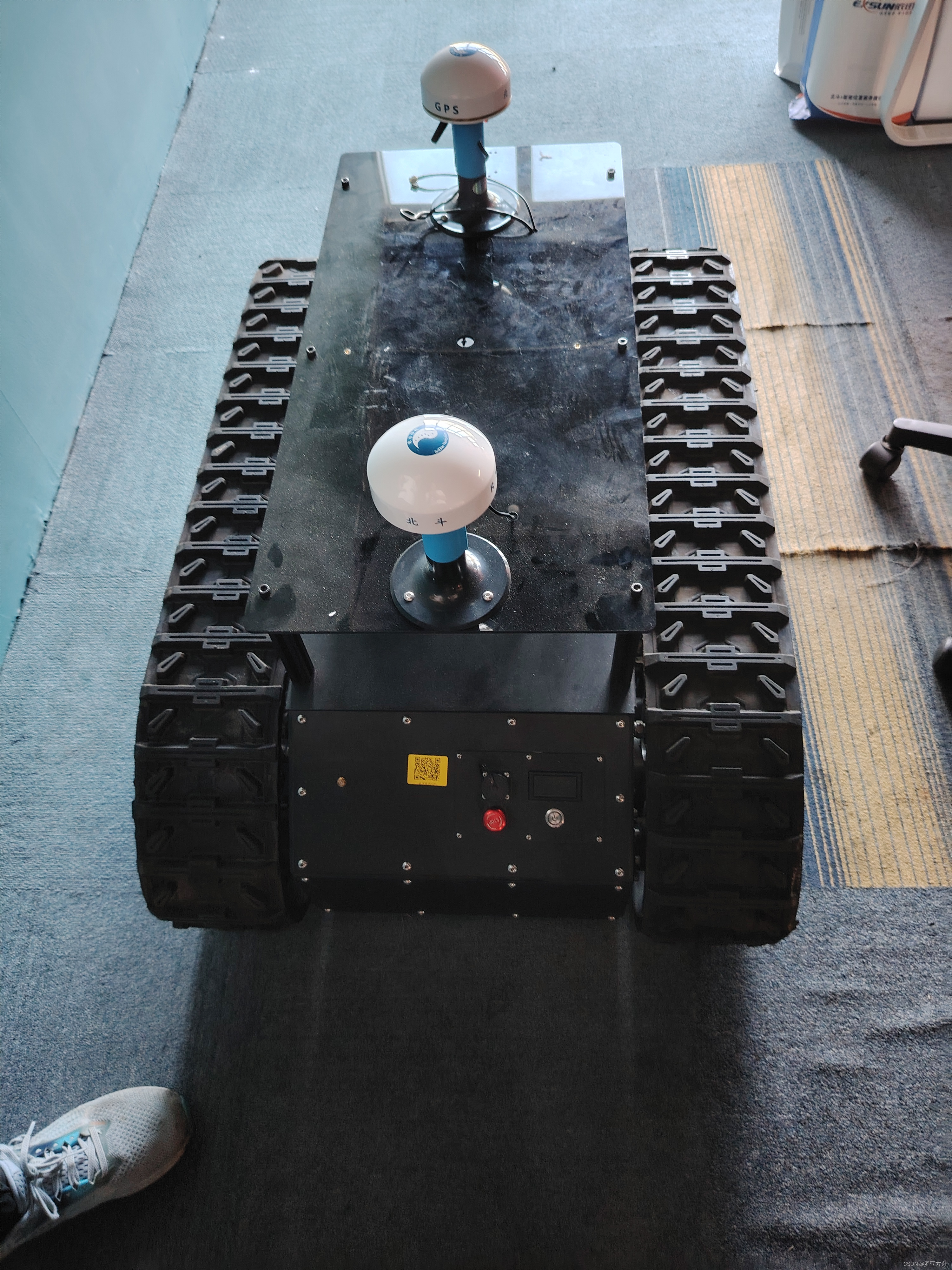
割草机器人底盘
 无线通信发射器
无线通信发射器
 北斗高精度基站
北斗高精度基站
 无线控制器
无线控制器
北斗高精度基站可以采用千寻或者其他类似的高精度账号做替换,如果是无信号的情况可以采用自建高精度基站。目前全国最多是移动创建了三千多的高精度CORS基站。
无线通信发射器我准备集成到底盘中,避免部署复杂,如果是机器人比较集中可以采用区域无线通信发射基站,这样可以降低运营成本。
- 电动机和传动系统:选择适合的电动机,并设计传动系统将电动机的动力传递给割草刀具。传动系统需要考虑到割草时的效率、功率输出和安全性。
目前采用电动模式,主要是因为电动控制更加精准,可以做成完全自动化驾驶。至于动力续航能力,后期可以考虑采用混动,目前电池续航能力在进一步提升中,消费的新能源汽车目前有很显著的体现。
- 割草刀具:选择合适的割草刀具,并安装在机器人底盘下方。割草刀具的设计应考虑到割草效率、耐久性和安全性。
目前考虑地质大学机械学院来完成改造设计,同步我们也在考虑市场化的割草刀具的适配和安装。
- 电子控制系统:设计控制机器人的电子系统,包括电机驱动、传感器采集、系统保护等。需要考虑到机器人的自主运动、割草刀具的启停控制以及安全保护功能。
目前采用电驱动就可以完美解决上面技术难点,目前很多传感器已经组件化可以直接调取使用。
- 导航系统:为机器人设计导航系统,可以采用北斗、惯性导航系统、视觉SLAM等技术实现机器人在工作区域内的定位和路径规划。
结合现有农机自动化驾驶技术积累,可以快速移植到割草机器人平台中。
- 避障系统:考虑在机器人中添加避障传感器,例如超声波传感器、激光雷达等,用于检测障碍物并规避。
目前主要采用激光雷达比较多一些但是成本会高一些,特别是360°范围类的激光雷达,多线模式,消耗电流同时也增大成本。这个可以按照等级或者场景进行调整,比如园区可以采用激光雷达模式,如果草原可以降低成本不需要激光雷达。
- 能源系统:确定机器人的能源供应方式,可以采用电池、太阳能充电等方式来满足机器人的电能需求。
如果是野外采用混动模式,如果是园区采用自动充电模式,综合来看采用混动模式,有电的情况优先采用电,没有电采用汽油。
- 软件控制:开发机器人的控制软件,实现自主运动、路径规划、割草任务调度等功能。
结合现有农机自动化驾驶技术积累,可以快速移植到割草机器人平台中,需要结合多场地复杂情况进一步迭代。
- 测试和优化:进行机器人的系统集成和测试,在实际环境中对机器人进行调试和优化,确保机器人的稳定性、安全性和割草效果。
持续测试工作。
制作割草机器人涉及到机械、电子、控制和软件等多个领域的知识,需要综合考虑机器人的设计、制造和调试等方面的工作。同时,还需要遵守相关的安全标准和法规,确保机器人在工作时符合安全要求。因此智能机器人云控平台需要一个综合性比较强的团队来完成。