步进电机(脉冲电机)
基于最基本的电磁铁原理,是一种可以自由回转的电磁铁,其工作原理是依靠气隙磁导的变化来产生电磁转矩。
由于步进电机是一个可以把电磁脉冲转换成机械运动的装置,具有很好的数据控制特性,因此,计算机成为步进电机的理想驱动源,随着微电子和计算机技术的发展,软硬件结合的控制方式成为了主流,即通过程序产生控制脉冲,驱动硬件电路。
单片机通过软件来控制步进电机,更好地挖掘了电机的潜力。在不超载的情况下电机的转速和停止位置只取决于脉冲信号的频率和数量;并且步进电机的脉冲数量与步进旋转的角度成正比,脉冲频率与步进转速成正比,所以很好的从源头控制信号的输出;并且步进电机只有周期性误差,使得在速度、位置等控制领域用步进电机来控制变得非常简单。
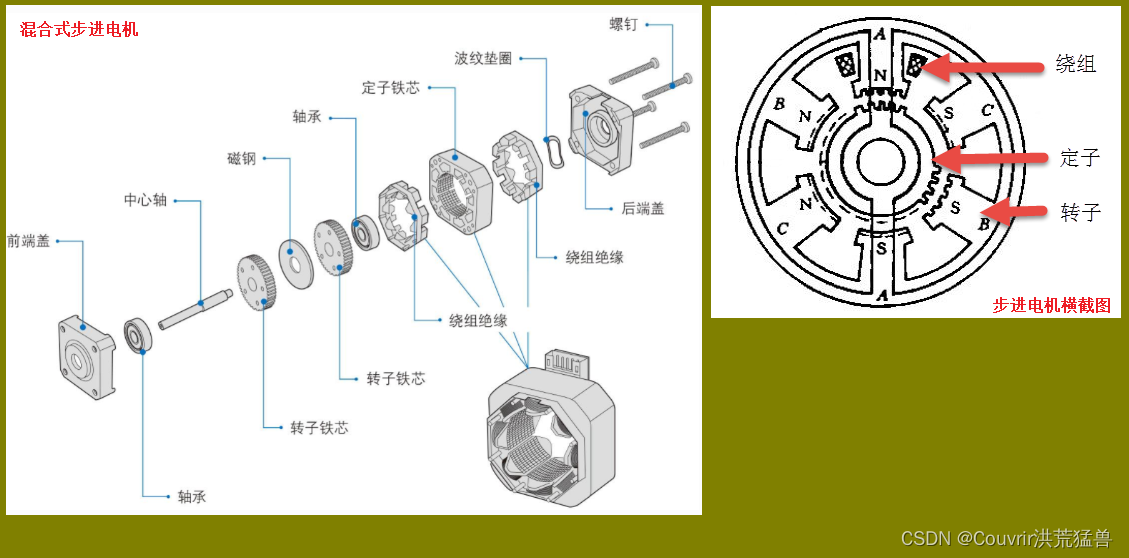
工作原理
通常步进电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生矢量磁场,磁场会带动转子旋转一定的角度,使得转子的一对磁场方向与定子的磁场方向一致。
当转子的矢量磁场旋转一个角度,转子也随着该磁场转步距角。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移和输入的脉冲数成正比、转速和脉冲频率成正比。改变绕组通电的顺序,电机就会反转。
所以可以控制脉冲数量、频率和电动机各向绕组的通电顺序来控制步进电机的转动。
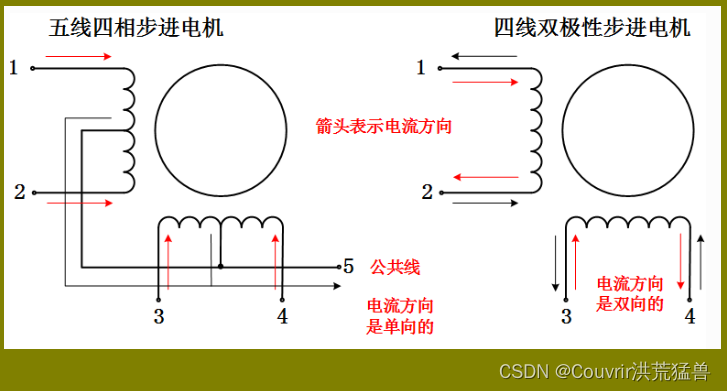
步进电机极性区分
步进电机极性区分:单极性步进电机、双极性步进电机。
单双极性步进电机指的是一个步进电机里面有几种电流的流向。如下图:左侧为单极性步进电机,右侧为双极性步进电机。
左侧的五线四相步进电机就是单极性步进电机,红色箭头为电流的走向,四根线的电流走向汇总到公共线。
测试的四线双极性步进电机,电机中有两个电流的回路。
单极性步进电机使用单极性绕组。一个电极上有两个绕组。当一个绕组通电时,产生一个北极磁场;另一个绕组通电时,产生一个南极磁场。因为从驱动器到线圈的电流不会反向,所以称为单极绕组。
双极性步进电机使用双极性绕组。每相使用一个绕组,通过将绕组的电流反向,电磁极性被反向。
双极性步进电机驱动原理
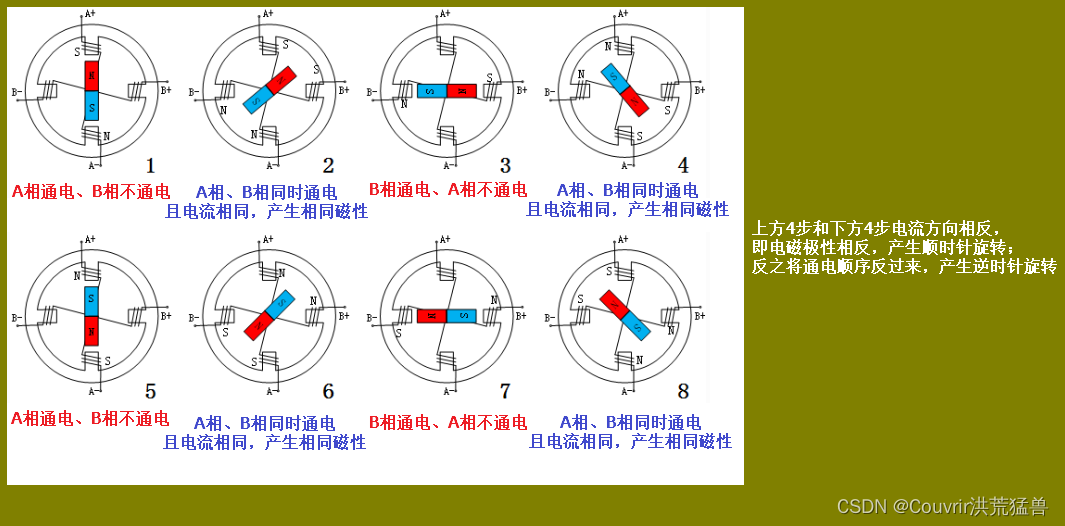
单相激励中只有整步驱动方式,双相激励中分类整步和半步驱动方式。
图中显示的步进顺序是单相激励步进,也可以理解为每次通电产生磁场的相只有一个(A相或B相)。
第一步:将A相通电,根据电磁铁原理产生磁场,并且因为异性相吸,所以磁场将转子固定在第一步的位置;
第二步:当A相关闭,B相通电,转子会旋转90°;
第三步:当B相关闭,A相通电,但极性和第一步相反,促使转子再次旋转90°。
第四步:当A相关闭,B相通电,但极性和第二步相反,促使转子再次旋转90°。
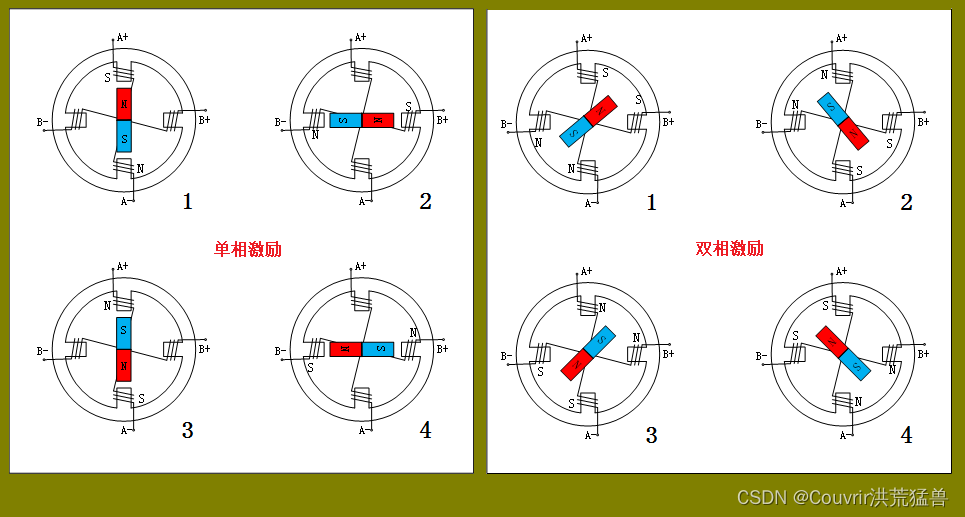
但是更常用的是双相激励步进(但是在转换时,一次只能换相一次)。此时通电顺序就变成了A、B相同时通电即可。
在双相激励的过程中,也可以在转换相位时加一个关闭相位的状态而产生走半步的现象,这将步进电机的整个步距角一分为二。例如一个90°的步进电机将每半步移动45°。
单极性步进电机驱动原理
单极性步进电机也分类整步和半步驱动方式。
双极性步进电机可以通过改变电流方向来改变每相的磁场方向。但单极性不是,有一个公共端直接决定了电流方向。
公共端需一直通电,剩下的四相只要有一个相通电即可形成回路产生磁场。
公共端不通电,两个相邻的相通电形成回路产生磁场。
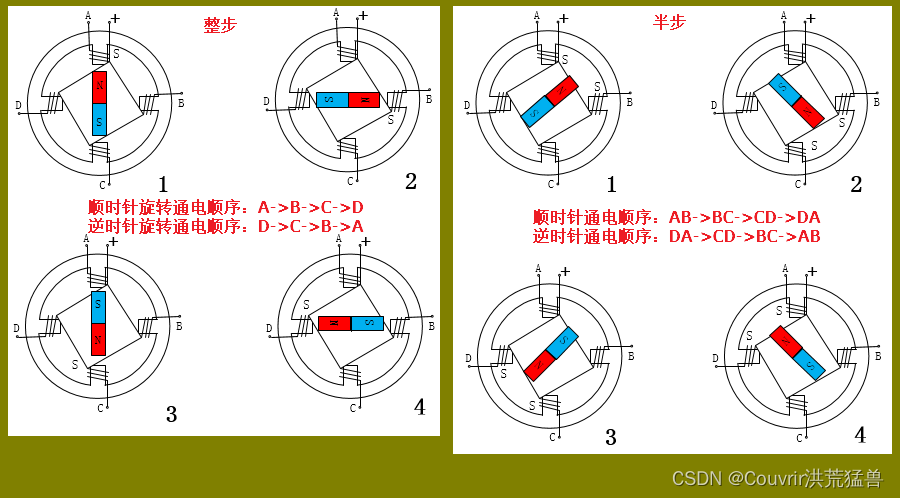
因此,A->AB->B->BC->C->CD->D->DA,转子每次只走半步45°。
细分器驱动原理
对于细分器驱动原理,不分单双极步进电机。以例。zhe

改变定子的电流比例可以使转子在任意角度停止。
细分的原理:通过改变定子的电流比例,改变转子在一个整步中的不同位置,可以将一个整步分成多个小步来运行。
如果驱动器的细分能力很强,可以将其分成32细分、64细分等。提高了步进电机旋转的顺畅度而且提高了每步的精度。