【ROS】郭老二博文之:ROS目录
1、简介
nav2_collision_monitor碰撞监视器是一个节点,为机器人提供了一个额外的安全级别。
它使用来自传感器的数据,执行若干与避免碰撞相关的任务,绕过成本图和轨迹规划器,监测是否需要紧急停止或者减速。
2、安全行为
Collision Monitor使用了以下安全行为模型:
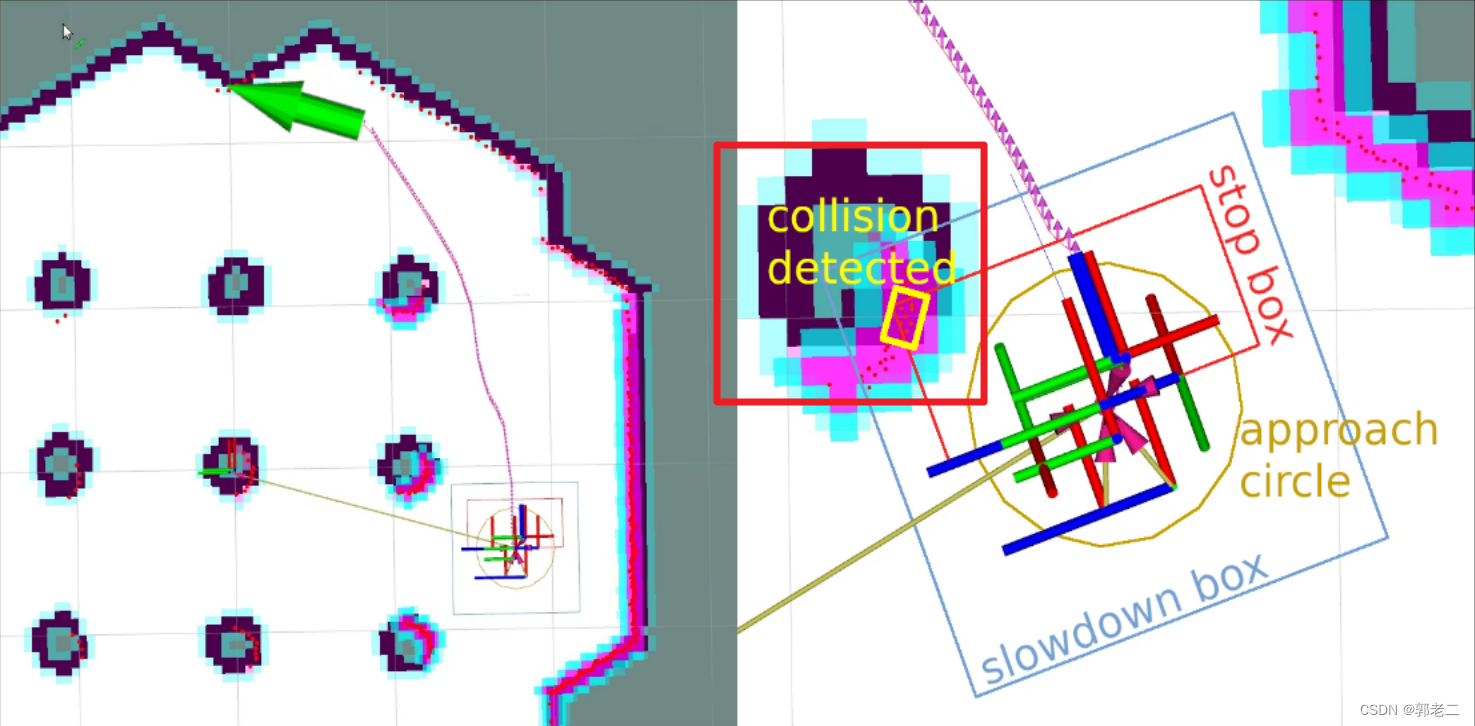
- 停止模式Stop model:定义一个区域和一个点阈值。如果在该区域内出现超过N个障碍点,则停止机器人,直到障碍物消失。
- 减速模型Slowdown model:在机器人周围定义一个区域,如果该区域内出现超过“N”个点,则放慢最大速度为。
- 接近模型Approach model:使用当前机器人速度,估计碰撞时间到传感器数据。如果时间少于“M”秒(0.5秒、2秒、5秒等),机器人将减速,这样距离碰撞至少有“M”秒。这样做的效果是让机器人始终在“M”秒内避免碰撞。
在某些情况下,用户可能希望在不影响机器人速度的情况下被告知检测到的障碍物。例如,当机器人靠近障碍物时,用户可能想要闪烁led灯或发出警报。它的工作原理类似于碰撞监视器,但不影响机器人的速度。它只会通过消息