众所周知,红黑树是从AVLTree树中衍变而来的,所以在学红黑树之前还是要好好的理解一下AVLTree树的原理,为理解红黑树减轻理解负担,好了进入正题。
红黑树原理:
由名可知,红黑树——肯定是与颜色有关的一个树,又因为是从AVLTree树中衍化过来的,所以也是搜索树(不是平衡二叉树,后面讲解定义时会详细解释),通过对不同情况的处理,去调整红黑树节点的颜色或者红黑树的高度去使其满足,红黑树的定义规则。
红黑树的定义:
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或
Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路
径会比其他路径长出俩倍,因而是接近平衡的,所以不是平衡二叉树。
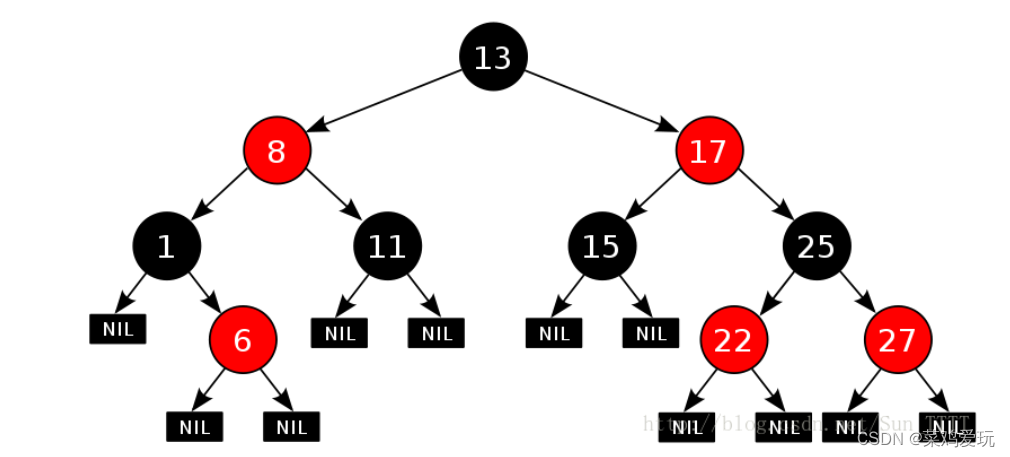
如上图,就是红黑树。
红黑树的性质:
1. 每个结点不是红色就是黑色
2. 根节点是黑色的
3. 如果一个节点是红色的,则它的两个孩子结点是黑色的
4. 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均 包含相同数目的黑色结点
5. 每个叶子结点都是黑色的(此处的叶子结点指的是空结点)
思考:为什么满足上面的性质,红黑树就能保证:其最长路径中节点个数不会超过最短路径节点个数的两倍?
答:上述红黑树的性质第4条 说明每条路上面的黑色节点数量都是相等的,所以说该节点的左右子树可以有一棵子树全为黑色节点 另一个红黑节点交替(红节点数量与黑节点数量相等),这就能保证其最长路径中节点个数不会超过最短路径节点个数的两倍。
红黑树中重要的函数讲解:
和AVLTree一样,插入函数是难点,但是掌握AVLTree之后,这里的插入就不怎么难了,AVLTree中提到左旋,右旋,这里不做讲解,如有疑惑,参考上篇文章,有流程图。
在我看来红黑树与AVLTree不同点就是规则不同,红黑树是靠颜色去调整高度差,而AVLTree是通过平衡因子去调节的。
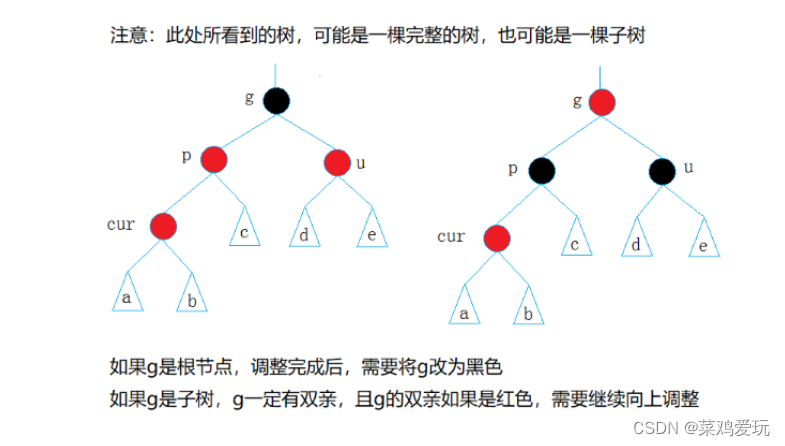
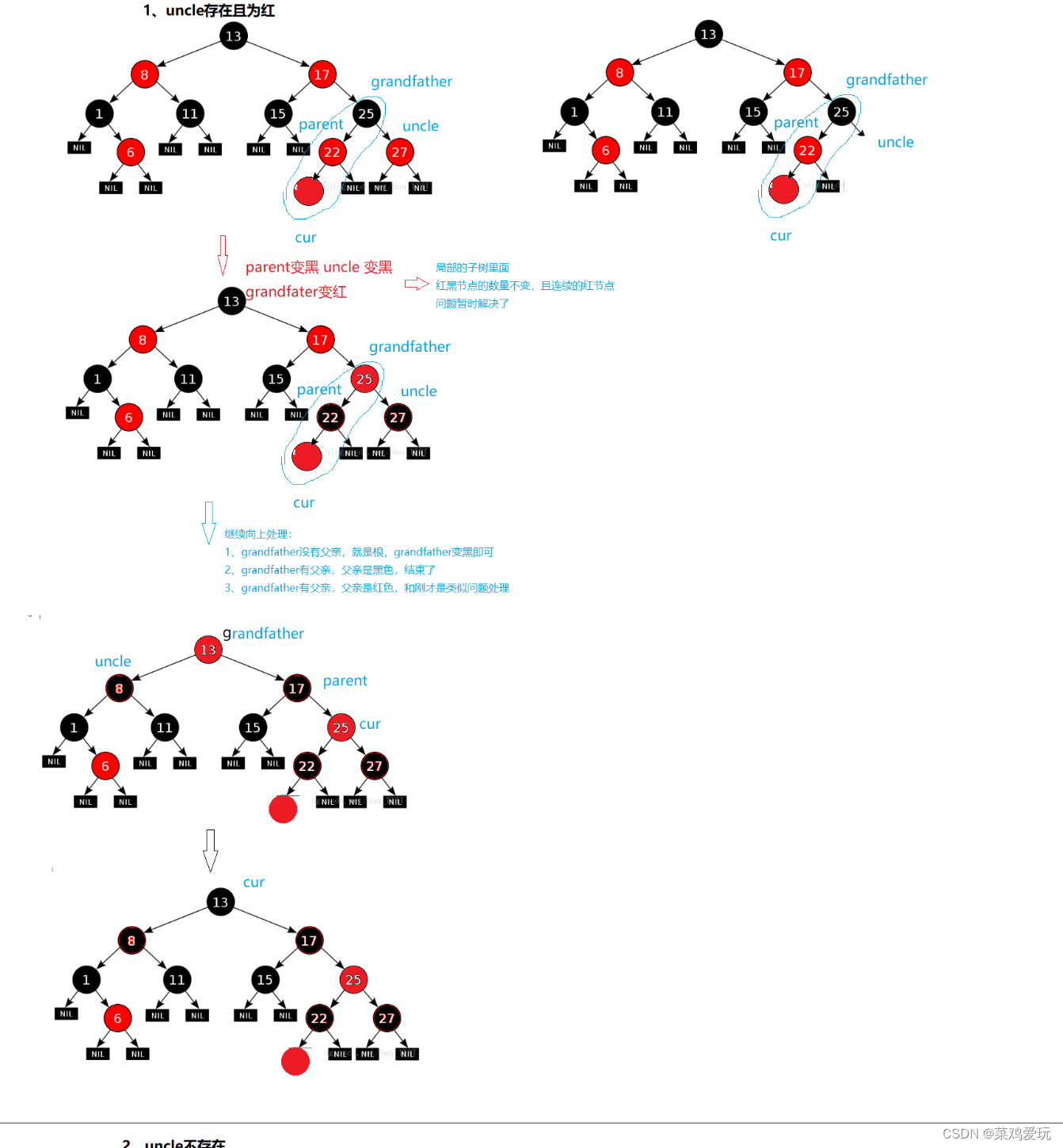
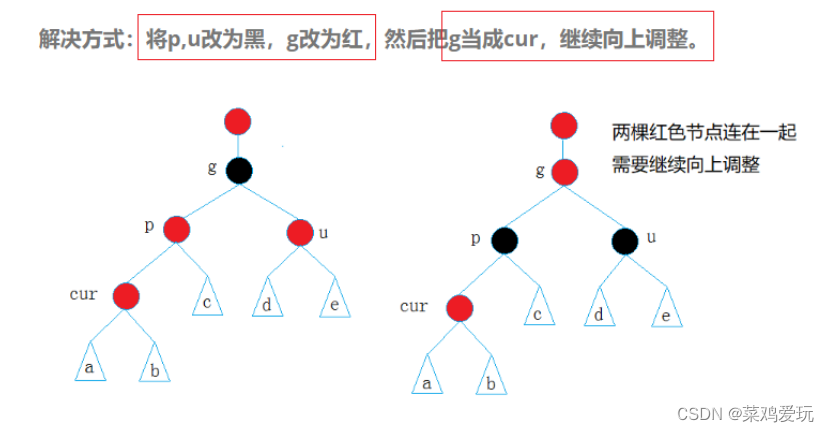
情况一:整棵树或者子树为上上图,就只能进行颜色更新 将uncle更新为黑色 父亲更新为黑色 祖父更新为红色 再继续向上以同样的方式更新 直到更新到根节点或者进行了一次旋转调整 (旋转调整会将树的高度改变并将颜色确定为最终的颜色)就不再向上更新
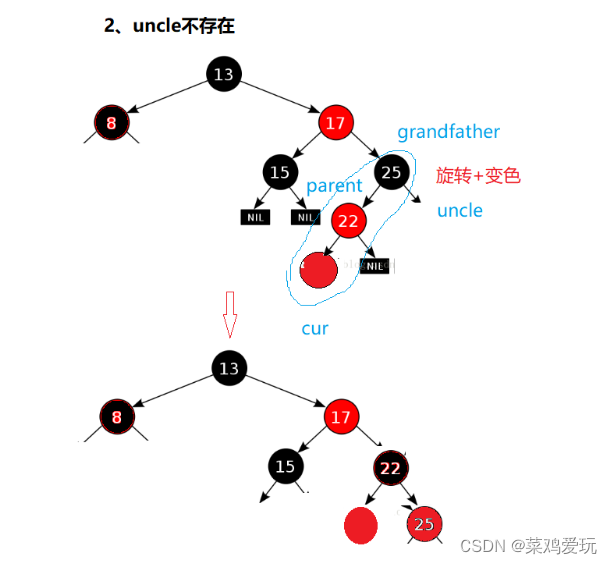
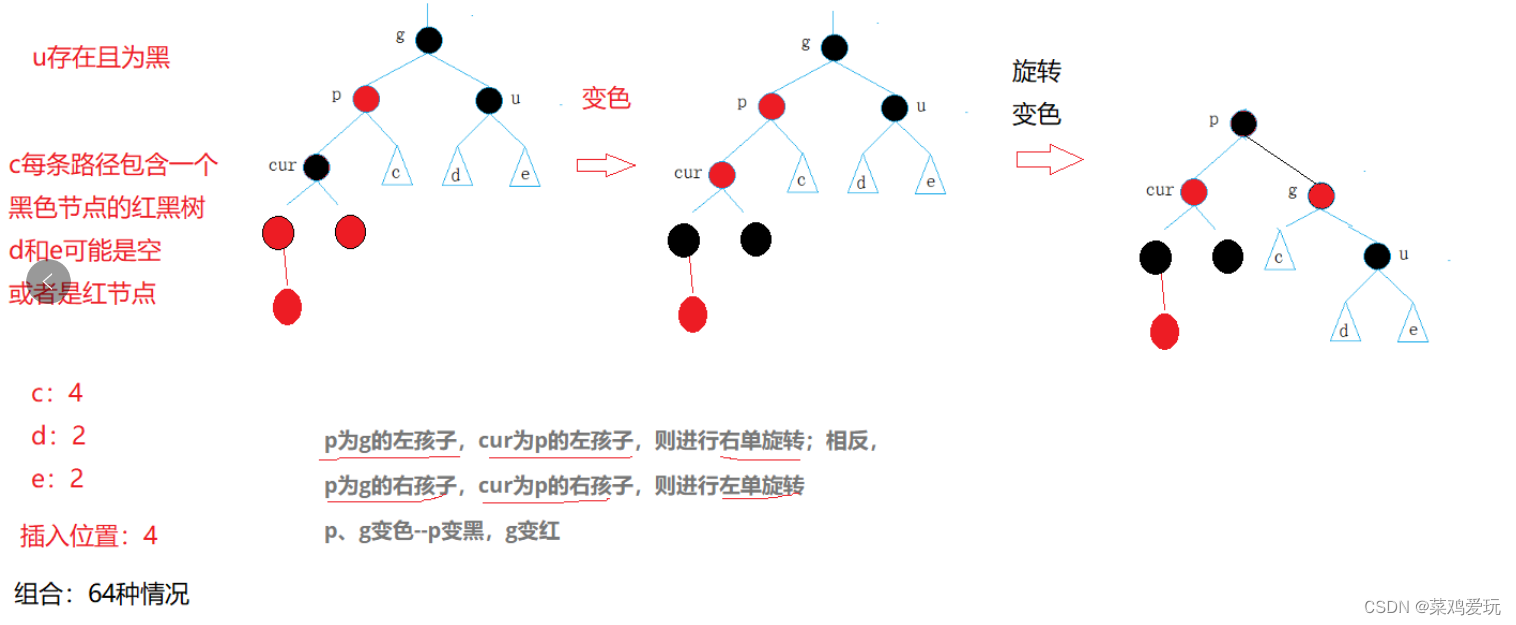
情况二:uncle存在且为黑或者不存在
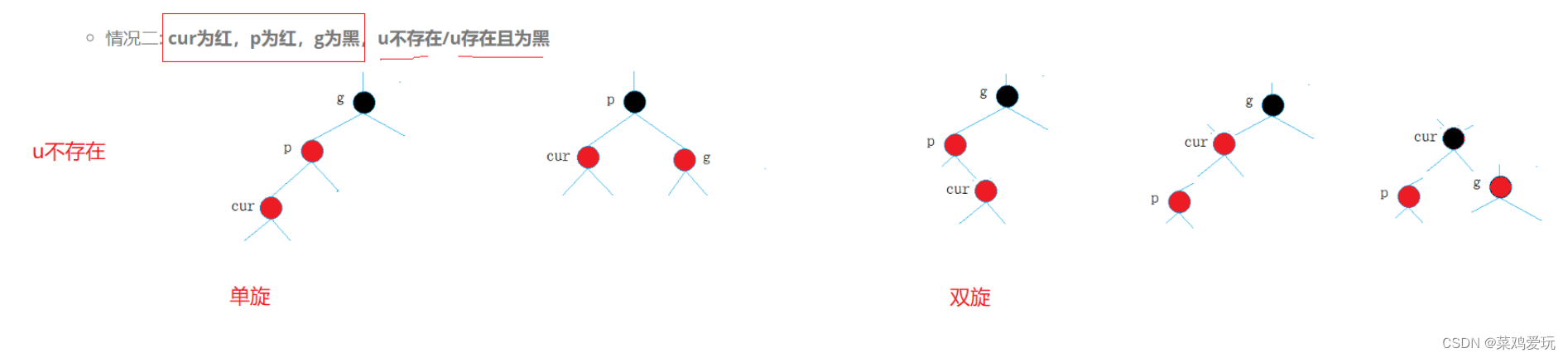
1,先进行情况一的颜色更新,出现了旋转的情况,再进行旋转 最后进行旋转的颜色更新
2,刚开始整棵树就为要旋转的情况或者为整棵树的子树,如上图
单选和双旋在AVLTree中已经讲解过了,这里最重要的就是如何进行颜色更新,而不是旋转。
红黑树完整代码:
#pragma once
#include<iostream>
using namespace std;
enum color
{
BLACK,
RED
};
template<class K,class V>
struct RBTreeNode
{
RBTreeNode<K, V>* _parent;
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
pair<K, V> _kv;
color _col;
RBTreeNode(const pair<K,V>& kv)
:_kv(kv)
,_parent(nullptr)
,_left(nullptr)
,_right(nullptr)
,_col(RED)
{
}
};
template<class K,class V>
class RBTree
{
typedef RBTreeNode<K, V> Node;
private:
Node* _root = nullptr;
public:
bool insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
_root->_col = BLACK;
return true;
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else//存在就不插入
{
return false;
}
}
cur = new Node(kv);
cur->_col = RED;
if (parent->_kv.first < cur->_kv.first)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
while (parent && parent->_col == RED)
{
Node* grandfater = parent->_parent;
assert(grandfater);
//祖父颜色不为黑 说明红黑树在插入之前就是不平衡的
assert(grandfater->_col == BLACK);
if (parent == grandfater->_left)
{
Node* uncle = grandfater->_right;
if (uncle && uncle->_col == RED)
{
grandfater->_col = RED;
parent->_col = uncle->_col = BLACK;
cur = grandfater;
parent = cur->_parent;
}
else
{
if (parent->_left == cur)
{
// g
// p u
//c
RotateR(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
// g
// p u
// c
RotateL(parent);
RotateR(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
else
{
Node* uncle = grandfater->_left;
if (uncle && uncle->_col == RED)
{
grandfater->_col = RED;
parent->_col = uncle->_col = BLACK;
cur = grandfater;
parent = cur->_parent;
}
else
{
if (parent->_right == cur)
{
// g
// u p
// c
RotateL(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
// g
// u p
// c
RotateR(parent);
RotateL(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
}
_root->_col = BLACK;
return true;
}
void Inorder()
{
_Inorder(_root);
}
bool IsBalance()
{
if (_root == nullptr)
{
return false;
}
if (_root->_col == RED)
{
cout << "根节点为红色,不是红黑树" << endl;
return false;
}
int benchmark = 0;
return PrevCheck(_root, 0, benchmark);
}
private:
bool PrevCheck(Node* root, int blackNum, int& benchmark)
{
if (root == nullptr)
{
if (benchmark == 0)
{
blackNum = benchmark;
return true;//第一次遍历到空 没有比较意义 将第一次的黑色节点作为参考去判断
}
if (blackNum != benchmark)
{
cout << "红黑树各路黑色节点数量不相同" << endl;
return false;
}
else
{
return true;
}
}
if (root->_col == BLACK)
{
blackNum++;
}
if (root->_col == RED && root->_parent->_col == RED)
{
cout << "出现连续红色节点,不是红黑树" << endl;
return false;
}
return PrevCheck(root->_left,blackNum,benchmark)
&& PrevCheck(root->_right,blackNum,benchmark);
}
void _Inorder(Node* root)
{
if (root == nullptr)
{
return;
}
_Inorder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second << endl;
_Inorder(root->_right);
}
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
{
subLR->_parent = parent;
}
Node* ppNode = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
if (ppNode == nullptr)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
subL->_parent = ppNode;
}
else
{
ppNode->_right = subL;
subL->_parent = ppNode;
}
}
}
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
{
subRL->_parent = parent;
}
Node* ppNode = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
if (ppNode == nullptr)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subR;
}
else
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
}
};
void TestRBTree1()
{
int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14, 0,5,30,25,20,4,13,30,28,27 }; // 测试双旋平衡因子调节
//int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };
RBTree<int, int> t1;
for (auto e : a)
{
t1.insert(make_pair(e, e));
}
t1.Inorder();
cout << "IsBalance:" << t1.IsBalance() << endl;
}
void TestRBTree2()
{
size_t N = 1000;
srand(time(0));
RBTree<int, int> t1;
for (size_t i = 0; i < N; ++i)
{
int x = rand();
cout << "Insert:" << x << ":" << i << endl;
t1.insert(make_pair(x, i));
}
cout << "IsBalance:" << t1.IsBalance() << endl;
}