目录
自动驾驶中的坐标系定义
关于坐标系的定义
几大常用坐标系
世界坐标系
自车坐标系
传感器坐标系
激光雷达坐标系
相机坐标系
如何理解坐标转换
机器人基础中的坐标转换概念
左乘右乘的概念
对左乘右乘的理解
再谈自动驾驶中的坐标转换
本节参考文献
自动驾驶中的坐标系定义
关于坐标系的定义
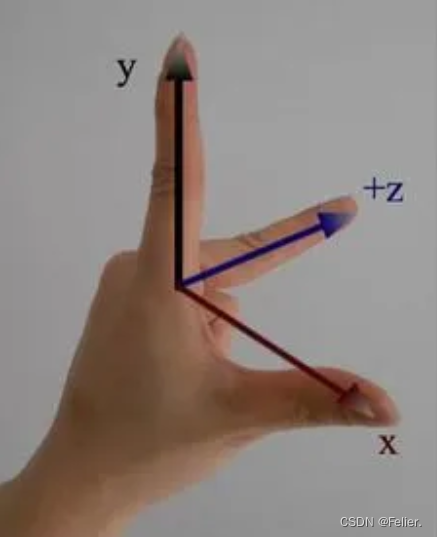
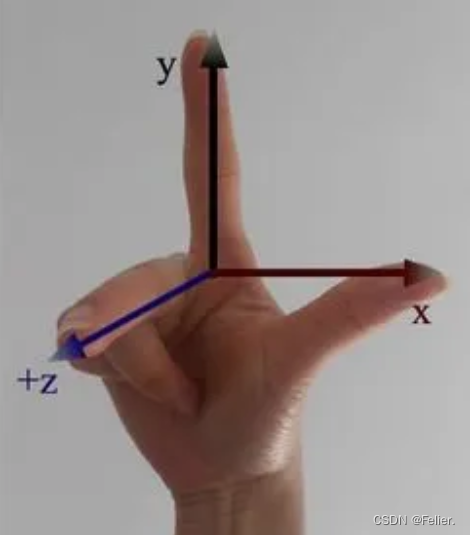
左手坐标系:以左手坐标系图示为例,通常拇指指向为X轴正方向,食指指向为Y轴正方向,中指指向为Z轴正方向;沿某坐标轴负方向朝向看去的逆时针旋转方向为正方向。右手坐标系:以右手坐标系图示为例,通常拇指指向为X轴正方向,食指指向为Y轴正方向,中指指向为Z轴正方向;沿某坐标轴负方向朝向看去的顺时针旋转方向为正方向。
几大常用坐标系
世界坐标系
世界坐标系,通常指的WGS-84,也就是经纬高(经度、纬度、高度)坐标系,一般在规划控制等模块用处比较多,其定义如下。
WGS-84坐标系的X轴指向BIH(国际时间服务机构)1984.0定义的零子午面(Greenwich)和协议地球极(CTP)赤道的交点。Z轴指向CTP方向。Y轴与X、Z轴构成右手坐标系。
自车坐标系
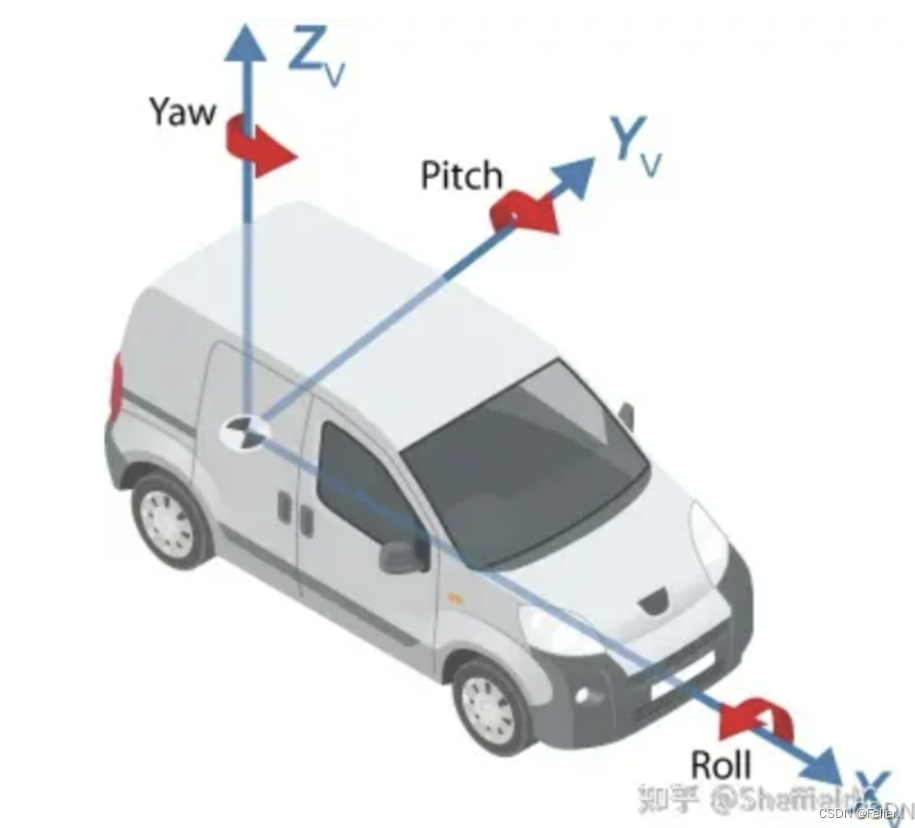
在常见的自动驾驶数据集中,自车坐标系通常遵循右手坐标系,坐标原点位于车辆后方车轴的中心地平面上。定义车辆前进的方向为X轴正方向,车辆左侧方向指向Y轴正方向,自地平面指向天空方向为Z轴正方向。这种指向又被形象的称为前左天坐标系。注意,对于不同的测试车辆可能具体的坐标定义不一致。

为了形象方便描述车辆位姿引入了欧拉角,如上图所示为欧拉角的物理意义的形象表达。在自动驾驶中通常定义:Roll为沿X轴的逆时针转动,即车辆翻滚角;Pitch为沿Y轴的逆时针转动,即车辆俯仰角;Yaw为沿Z轴的逆时针转动,为车辆偏航角。
传感器坐标系
如下图所示,自动驾驶车辆可能包含多类传感设备,例如camera、lidar、radar等。每类传感器测量的数据都是直接在自身的传感器坐标系中进行描述的。以nuScence数据集内的激光雷达传感器、相机为例浅析传感器坐标系的定义,其他传感器不做赘述。

激光雷达坐标系
如图所示的nuScenes数据集针对激光雷达坐标系的定义(右手坐标系):坐标原点为激光雷达传感器中心,车辆右侧指向坐标系X轴正方向,前进方向指向坐标系Y轴正方向。
相机坐标系
如图所示的nuScenes数据集针对前视Cmera坐标系的定义(左手坐标系):坐标原点为前视摄像头为中心,车辆右侧指向坐标系X轴正方向,前进方向指向坐标系Z轴正方向。
如何理解坐标转换
机器人基础中的坐标转换概念
左乘右乘的概念
将尽六、七年前的机器人基础的相关知识,已经忘记的差不多了,便也不从基础的理论推导讲起,直接那大家的说法或者结论,就是:左乘,是指的旋转运动针对固定的坐标系而言;而右乘,是指旋转的运动针对相对的坐标系而言(这里的相对坐标系的概念类似于我们之前讲的欧拉角)。
对左乘右乘的理解
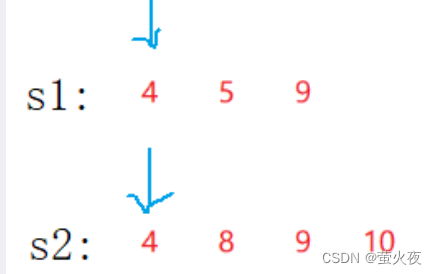
换句话说,左乘可以认为始终绕着世界坐标系转,右乘是绕着最新的自身坐标系转。比如我下面画的插图所示,上方为左乘(实际是绕世界坐标系Y轴旋转),下方为右乘。

上面所说,都是在针对坐标系或者说位姿进行变换,实际上我们在做各种变换的另外一各直观的目的就是:对于世界坐标系中的绝对的一点的坐标,能够在不同的坐标系中进行坐标表达,毕竟那个点就是实实在在存在的嘛。
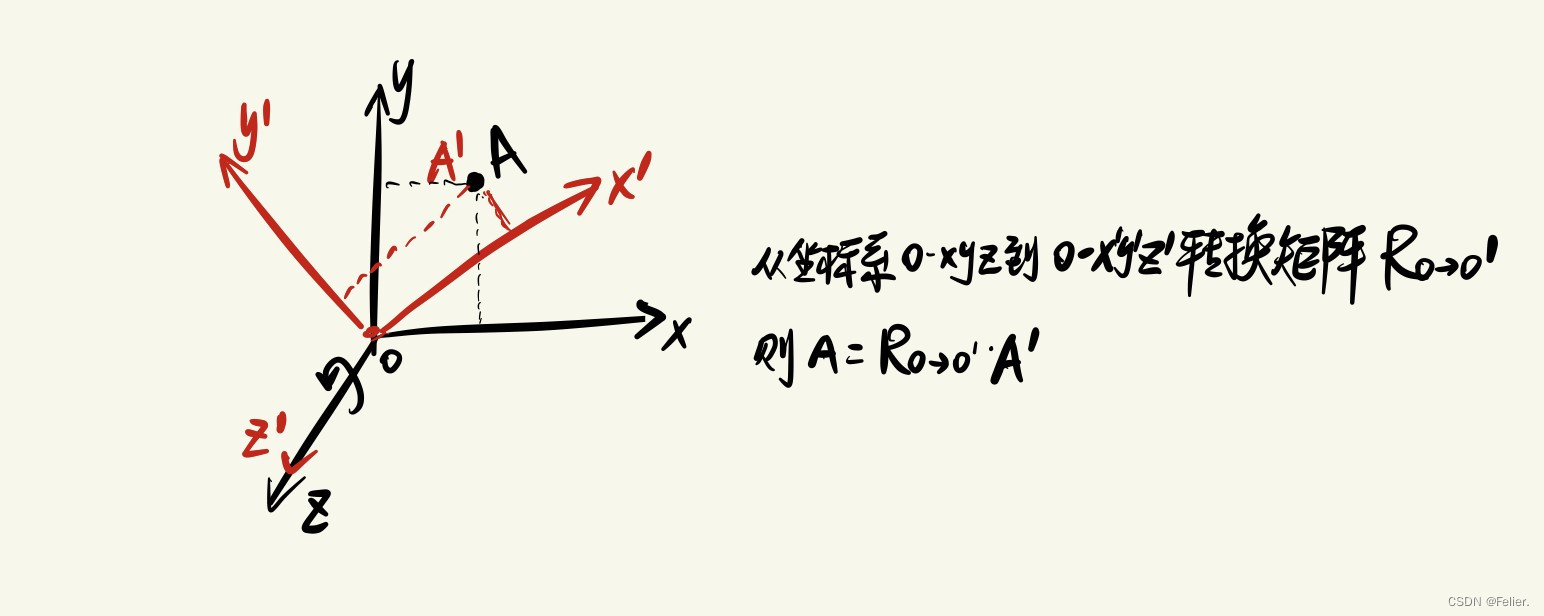
如上图所示,A点不变,坐标系OXYZ旋转一定角度得到OXYZ新坐标系下,OXYZ坐标系下的P'来自于原P点,因此存在图中的变换公式。
再谈自动驾驶中的坐标转换
基于上面的分析,例如对于相机坐标系和激光雷达坐标系的变换。例如从camera坐标系到lidar坐标系的变换,实际就是原坐标系左乘一个世界坐标系表示的变换矩阵;又如,从camera坐标系的坐标系1转至camera坐标系2,自然就是右乘自身变换矩阵。
本节参考文献
CSDN_关于旋转矩阵的左乘与右乘问题