目录
概述
一、开发环境
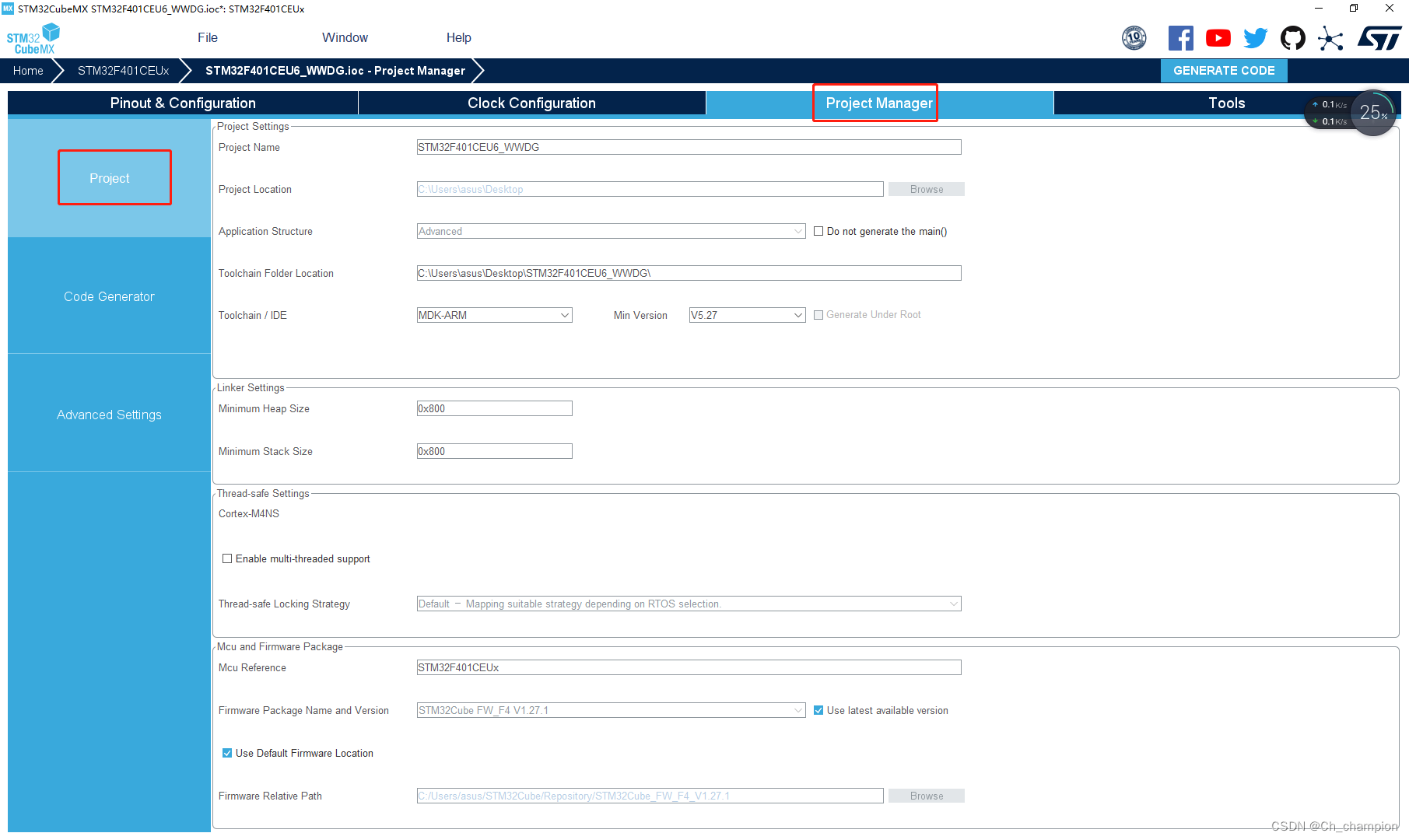
二、STM32CubeMx配置
三、编码
四、运行结果
五、总结
概述
一个成熟靠谱的项目,离不开“看门狗”的必选项,凡是人写的程序多少都会有出现bug的情况(或芯片外设受外界干扰导致故障程序卡死、跑飞的情况)。为了避免产品变成砖头,引入看门狗是很有必要,可以有效解决程序的跑飞(确保程序在大部分情况能正常运行)。
来自百度百科解释(看门狗)
看门狗定时器(WDT,Watch Dog Timer)是单片机的一个组成部分,它实际上是一个计数器,一般给看门狗一个数字,程序开始运行后看门狗开始计数。如果程序运行正常,过一段时间CPU应发出指令让看门狗置零,重新开始计数。如果看门狗增加到设定值就认为程序没有正常工作,强制整个系统复位。
STM32的内置看门狗-(详细请移步参阅-STM32F4xx中文参考手册.pdf文档)
STM32内置两个看门狗,提供了更高的安全性、时间的精确性和使用的灵活性。两个看门狗设备(独立看门狗、窗口看门狗)可以用来检测和解决由软件错误引起的故障。当计数器达到给定的超时值时,触发一个中断(仅适用窗口看门狗)或者产生系统复位。
1)、独立看门狗(IWDG)由专用的低速时钟(LSI)驱动(32kHz),即使主时钟发生故障它仍有效。独立看门狗适合应用于需要看门狗作为一个在主程序之外 能够完全独立工作,并且对时间精度要求低的场合。
2)、窗口看门狗由从APB1时钟(84MHz)分频后得到时钟驱动(42MHz)。通过可配置的时间窗口来检测应用程序非正常的过迟或过早操作。 窗口看门狗最适合那些要求看门狗在精确计时窗口起作用的程序。

一、开发环境
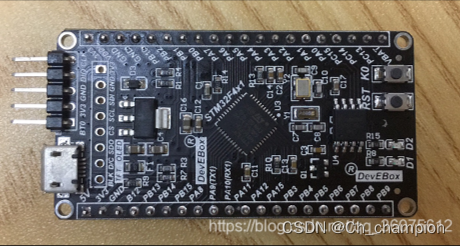
1、硬件平台
STM32F401CEU6
内部Flash : 512Kbytes,SARM : 96 Kbytes
二、STM32CubeMx配置
2.1、系统时钟配置

2.2、下载调试配置

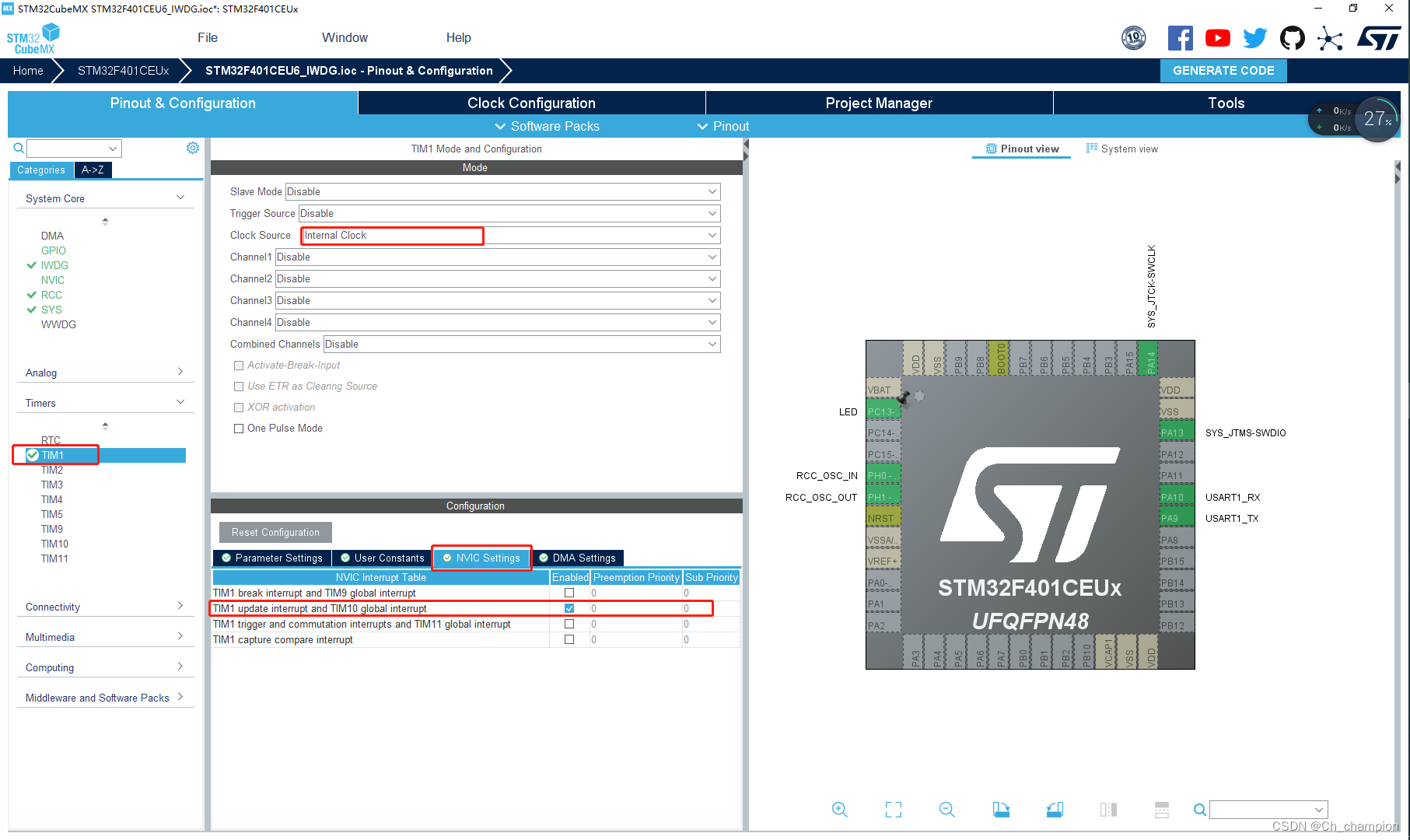
2.3、TIM配置(1ms中断)

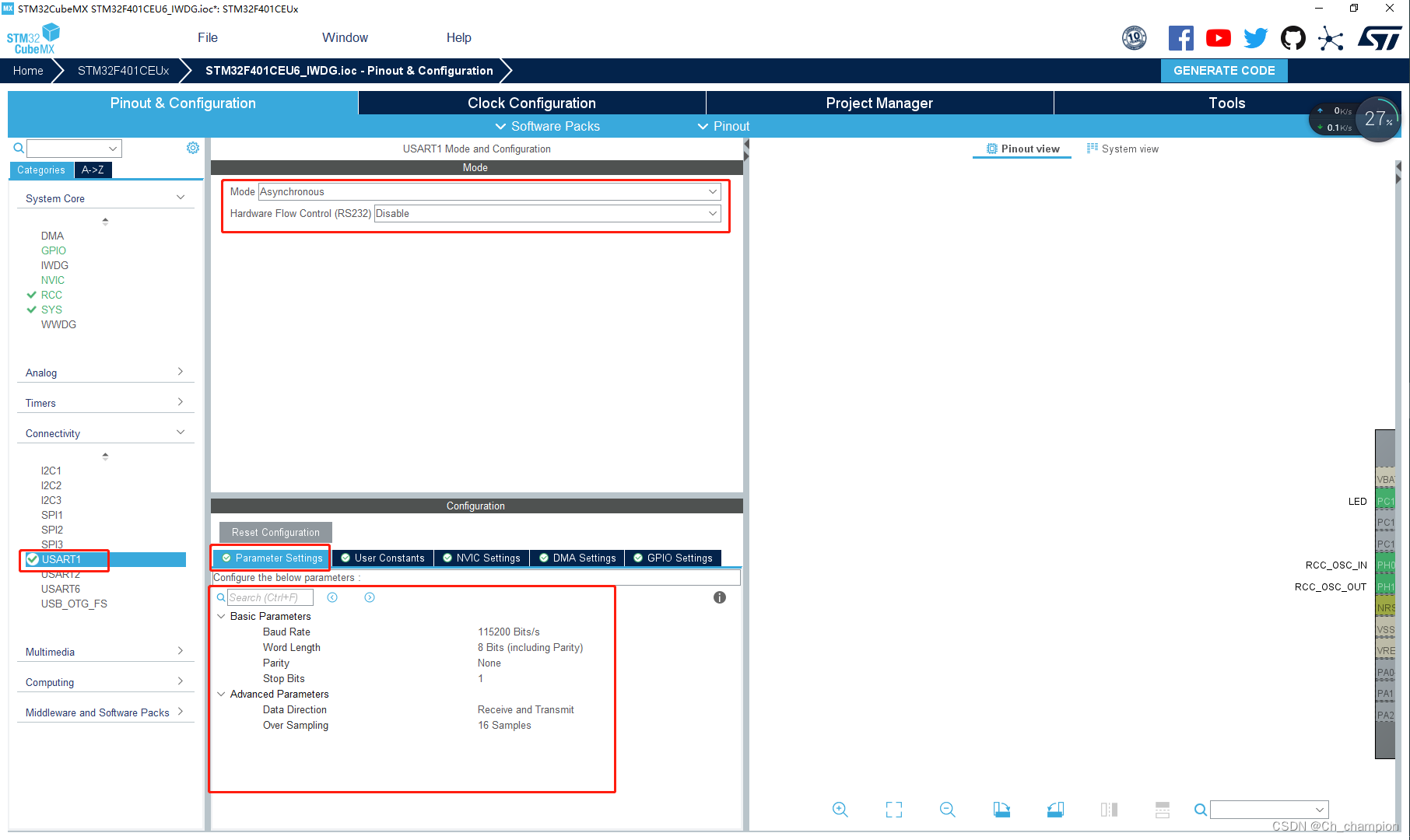
2.4、usart1配置

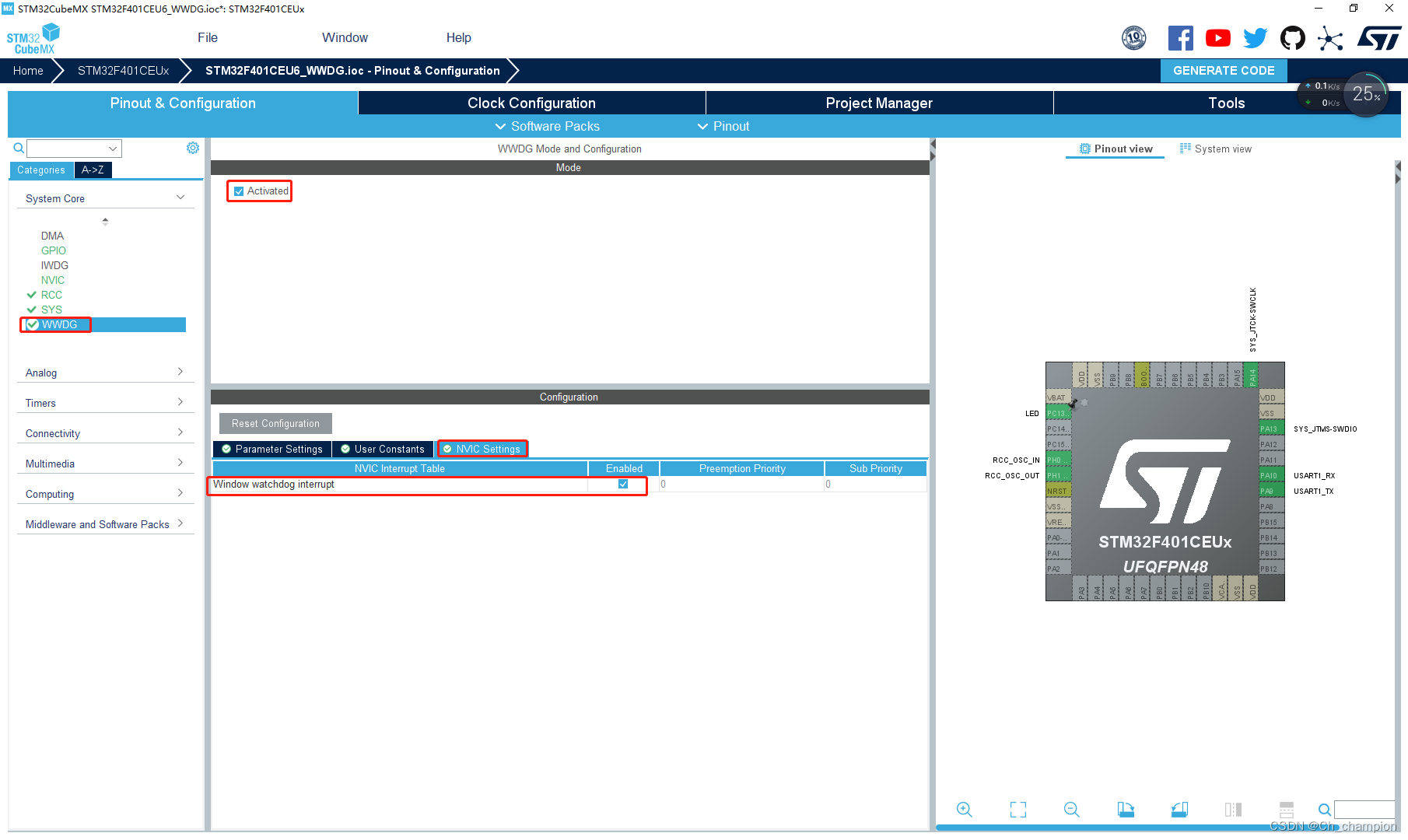
2.5、窗口看门狗(WWDG)


窗口看门狗的定义
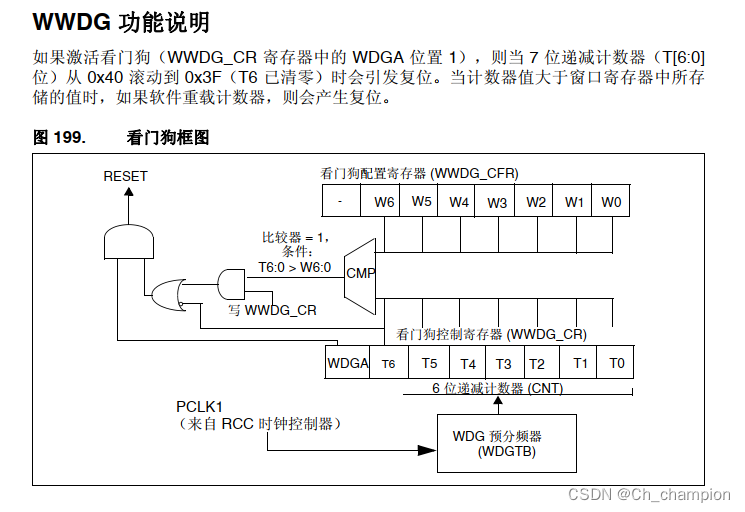
窗口看门狗跟独立看门狗一样,也是一个递减计数器不断的往下递减计数,当减到一个固定值 0x3F 时还不喂狗的话,产生复位,这个值叫窗口的下限,是固定的值,不能改变。
窗口看门狗之所以称为窗口,就是因为其喂狗时间是在一个有上下限的范围内(计数器减到某个值~计数器减到0x3F),在这个范围内才可以喂狗,可以通过设定相关寄存器,设定其上限时间(但是下限是固定的0x3F)。
1)、计数器的初始值
2)、是我们设置的上窗口(W[6:0]值)
3)、是下窗口值(0x3F)
窗口看门狗计数器的值只有在2和3 之间(上窗口和下窗口之间)才可以喂狗。窗口看门狗中断:
并且窗口看门狗还可以使能中断,如果使能了提前唤醒中断,系统出现问题,喂狗函数没有生效,那么在计数器由减到0x40 (0x3f+1) 的时候,便会先进入中断,之后才会复位,你也可以在中断里面喂狗。
A、第一种计算方法:
从上图得知
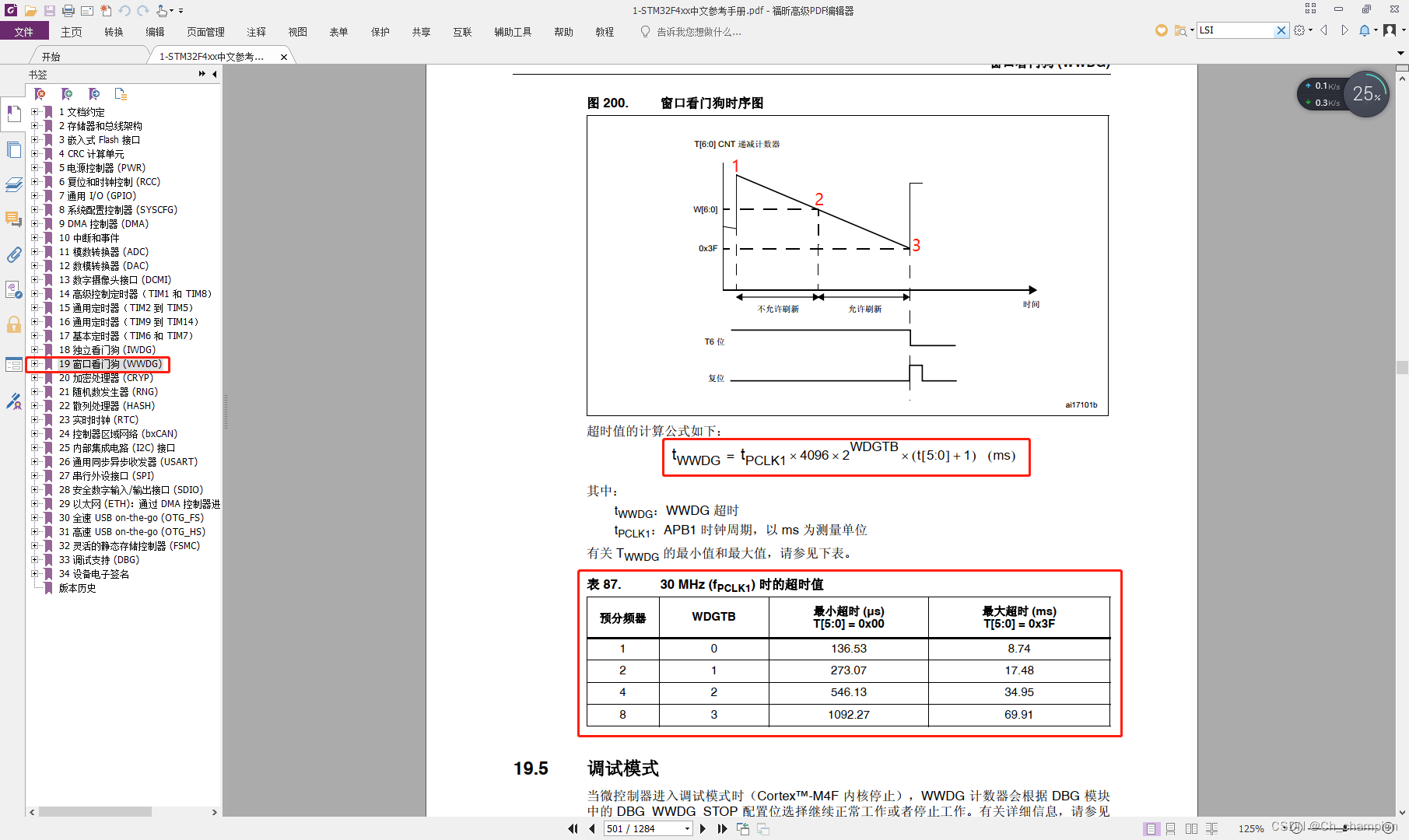
看门狗超时时间:Twwdg = Tpclk1 x 4096 x 2^wdgtb x (T[5:0]+ 1) ms;
当PCLK1 = 42MHZ 时,WDGTB 取不同的值时有最小和最大的超时时间;
当WDGTB=0时,递减计数器有7 位T[6:0] ,当位6 变为0 的时候就会产生复位,实际上有效的计数位是T[5:0],而且T6 必须先设置为1。如果T[5:0]=0 时,递减计数器再减一次,就产生复位了,那这减一的时间就等于计数器的周期=1/CNT_CK = Tpclk1 * 4096 * (2 ^WDGTB) = 1/42 * 4096 *2^ 0 = 97.52us,这个就是最短的超时时间。
如果T[5:0] 全部装满为1,即63,当他减到0X40 变成0X3F 时,所需的时间就是最大的超时时间 = 97.52 *(2^6) = 6.241ms。
B、第二种计算方法:
看门狗超时时间:Twwdg = ( 4096 * 窗口值 ) / PCLK1,
当PCLK1 = 42MHZ 时,WDGTB 取不同的值时有最小和最大的超时时间;
计数器最大值取127,窗口下限值为63,
最小超时时间:窗口上限值为64,窗口值为1
最大超时时间:窗口上限值为127,窗口值为64
当WDGTB=0时,分频系数为1,(STM32Cube MX可以直接配置分频系数)
最小超时时间=1/CNT_CK = (( 4096 * 分频系数 ) / PCLK1) * 窗口值 = 1/42 * 4096 * 1 = 97.52us;
最大的超时时间=1/CNT_CK = (( 4096 * 分频系数 ) / PCLK1) * 窗口值= 1/42 * 4096 * 64 = 97.52 * 64 = 6.241ms。
当我们配置WWDG如下时:
1)、配置分频系数为8,
2)、窗口上限值为90,
3)、窗口下限值为63=(0x3F),
4)、计数器的值为127,
5)、窗口值为27,(90+(63+1) - 127 = 154 - 127 = 27)
6)、PCLK1 = 42MHz,
窗口时间 = ((4096分频系数)/PCLK1) * 27 = ((4096 * 8) / 42MHz) * 27 = 21.065 ms
最早喂狗时间 = ((4096分频系数)/PCLK1) * (127 - 90) = ((4096 * 8) / 42MHz) * 37 = 28.867 ms
最迟喂狗时间 = ((4096*分频系数)/PCLK1) * (127 - 63) = ((4096 * 8) / 42MHz) * 64 = 49.932 ms
2.6、生成代码



三、编码
1、usart.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
#include "stdio.h"
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the EVAL_COM1 and Loop until the end of transmission */
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
int fgetc(FILE * f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/* USER CODE END 1 */
2、 tim.c文件 (本示例使用“定时器”模拟任务来执行程序逻辑代码)
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim1;
/* TIM1 init function */
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 84-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 1000-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspInit 0 */
/* USER CODE END TIM1_MspInit 0 */
/* TIM1 clock enable */
__HAL_RCC_TIM1_CLK_ENABLE();
/* TIM1 interrupt Init */
HAL_NVIC_SetPriority(TIM1_UP_TIM10_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM1_UP_TIM10_IRQn);
/* USER CODE BEGIN TIM1_MspInit 1 */
/* USER CODE END TIM1_MspInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspDeInit 0 */
/* USER CODE END TIM1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM1_CLK_DISABLE();
/* TIM1 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM1_UP_TIM10_IRQn);
/* USER CODE BEGIN TIM1_MspDeInit 1 */
/* USER CODE END TIM1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
#include "stdio.h"
#include "wwdg.h"
uint32_t timeCount_10ms = 0;
uint32_t timeCount_20ms = 0;
uint8_t times = 0;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim->Instance == TIM1) { //任务计数1ms
timeCount_10ms++;
timeCount_20ms++;
if(timeCount_10ms==10) {
timeCount_10ms = 0;
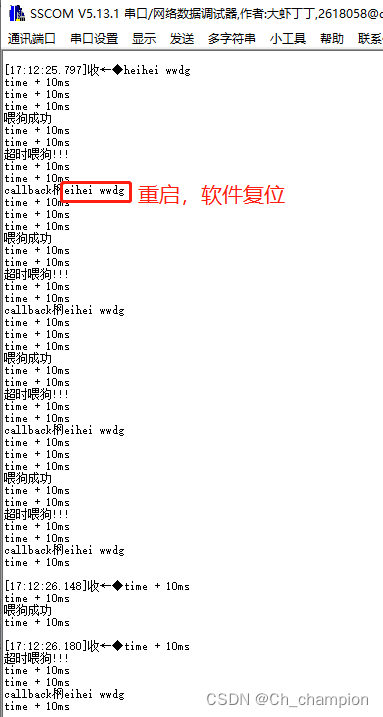
printf("time + 10ms\n");
//通过得知早喂晚喂狗都不行,一定要在上窗口和下窗口之间喂狗才行
//最早喂狗时间 = ((4096分频系数)/PCLK1) * (127 - 90) = ((4096 * 8) / 42MHz) * 37 = 28.867 ms
//最迟喂狗时间 = ((4096*分频系数)/PCLK1) * (127 - 63) = ((4096 * 8) / 42MHz) * 64 = 49.932 ms
times++;
if (times == 3) {
printf("喂狗成功 \n");
HAL_WWDG_Refresh(&hwwdg); //喂狗
} else if (times == 5) {
times = 0;
printf("超时喂狗!!! \n");
}
}
}
}
/* USER CODE END 1 */
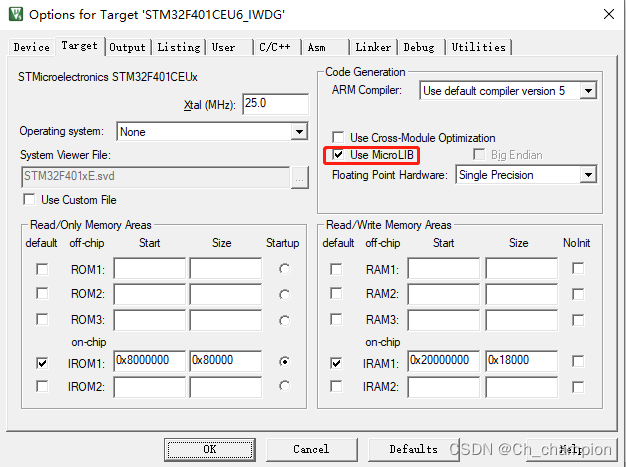
3、wwdg.c文件
HAL库对应的API
HAL_WWDG_Init(WWDG_HandleTypeDef *hwwdg); //看门狗初始化
HAL_WWDG_Refresh(WWDG_HandleTypeDef *hwwdg); //喂狗
HAL_WWDG_IRQHandler(WWDG_HandleTypeDef *hwwdg); //看门狗中断处理函数
//功能: 判断中断是否正常,并进入中断回调函数
__weak HAL_WWDG_EarlyWakeupCallback(hwwdg); //看门狗中断回调函数
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file wwdg.c
* @brief This file provides code for the configuration
* of the WWDG instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "wwdg.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
WWDG_HandleTypeDef hwwdg;
/* WWDG init function */
void MX_WWDG_Init(void)
{
/* USER CODE BEGIN WWDG_Init 0 */
/* USER CODE END WWDG_Init 0 */
/* USER CODE BEGIN WWDG_Init 1 */
/* USER CODE END WWDG_Init 1 */
hwwdg.Instance = WWDG;
hwwdg.Init.Prescaler = WWDG_PRESCALER_8;
hwwdg.Init.Window = 95;
hwwdg.Init.Counter = 127;
hwwdg.Init.EWIMode = WWDG_EWI_ENABLE;
if (HAL_WWDG_Init(&hwwdg) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN WWDG_Init 2 */
/* USER CODE END WWDG_Init 2 */
}
void HAL_WWDG_MspInit(WWDG_HandleTypeDef* wwdgHandle)
{
if(wwdgHandle->Instance==WWDG)
{
/* USER CODE BEGIN WWDG_MspInit 0 */
/* USER CODE END WWDG_MspInit 0 */
/* WWDG clock enable */
__HAL_RCC_WWDG_CLK_ENABLE();
/* WWDG interrupt Init */
HAL_NVIC_SetPriority(WWDG_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(WWDG_IRQn);
/* USER CODE BEGIN WWDG_MspInit 1 */
/* USER CODE END WWDG_MspInit 1 */
}
}
/* USER CODE BEGIN 1 */
#include "stdio.h"
void HAL_WWDG_EarlyWakeupCallback(WWDG_HandleTypeDef *hwwdg)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(hwwdg);
printf("callback 超时喂狗 \r\n");
}
/* USER CODE END 1 */
4、main.c文件
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "wwdg.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM1_Init();
MX_WWDG_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim1);
printf("heihei wwdg \r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
四、运行结果
五、总结
好了,介绍完毕。有了它,再也不用担心,程序跑飞了,希望对你有所帮助,谢谢光临!感谢参阅。