前言
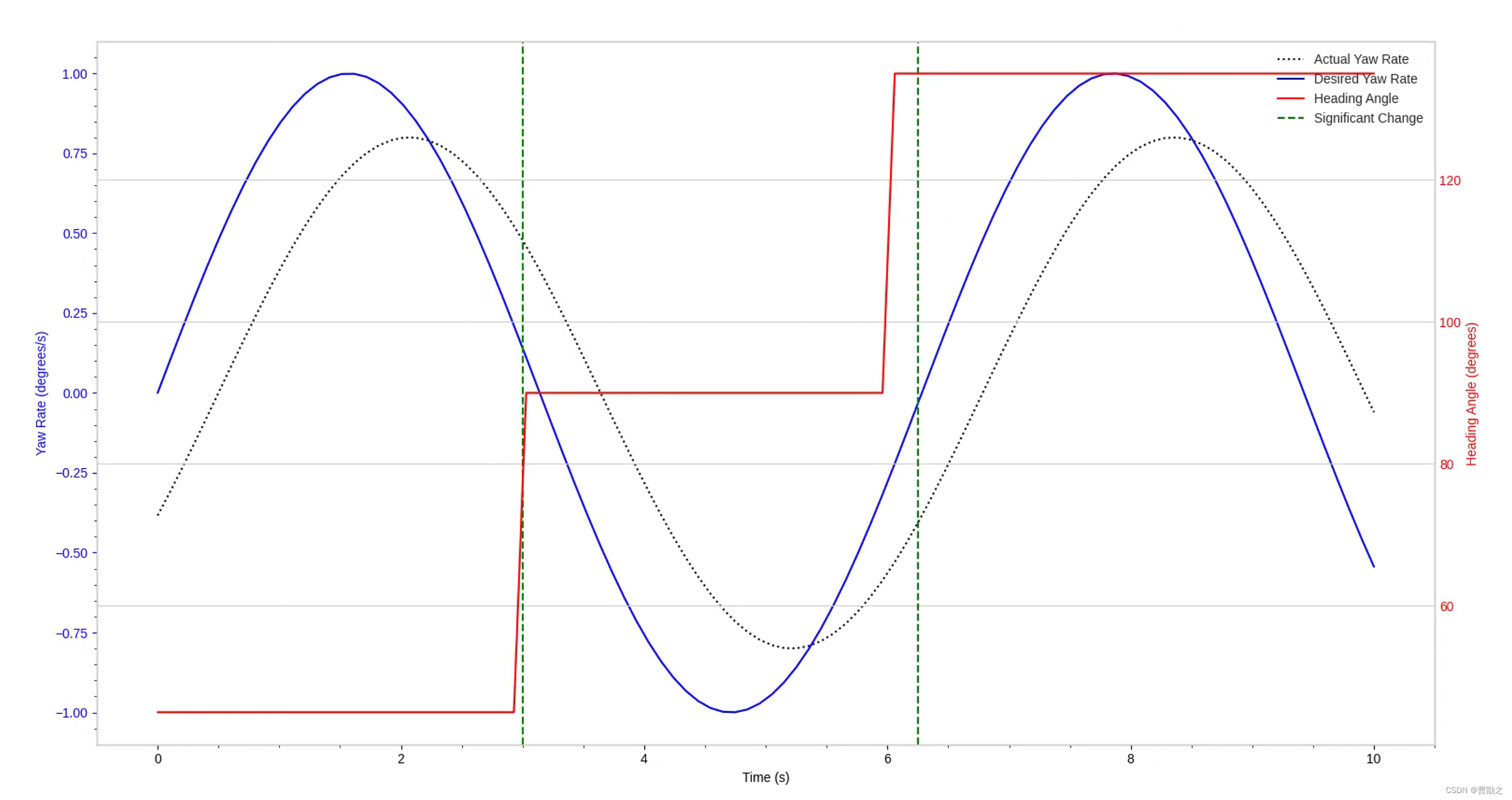
我的科研论文中需要绘制一个精美的折线图,我的折线图中有三条曲线,分别表示期望角速度指令信号,和实际的角速度信号,还有实际的航向角信号,现在我已经拥有了数据,使用Python中matplotlib.plt.plot来直接绘制不够精美,我希望绘制一个精美的折线图,要求是:
- 提升绘图的美观程度,特点是风格简单明快。
- 这三个曲线要绘制在一张图中
- 实际角速度信号置于底层,期望角速度信号置于中层,实际航向角信号置于顶层
- 期望角速度信号和实际航向角信号均用实线表示,实际角速度信号用小点表示
- 曲线图左侧y轴代表角速度,右侧y轴代表航向角,x轴代表时间
- 每一次实际航向角的巨大变化都代表着实际中路径的弯折九十度左右,一共发生了3次,我可以提供这三次的分别发生时间,需要在对应时间位置,垂直于x轴画一条虚线标识
- 图像的长宽比是2:1
代码
下面提供实例,代码作为模板
from cProfile import label
from tkinter.ttk import Style
import matplotlib.pyplot as plt
import numpy as np
import seaborn as sns
from scipy.spatial.distance import cdist
from matplotlib.ticker import AutoMinorLocator
# 假定你已经有了数据,这里我用随机数代替
# time为时间轴数据,yaw_rate_cmd为期望角速度指令,yaw_rate_real为实际角速度信号,heading_angle为实际航向角信号
time = np.linspace(0, 10, 100)
yaw_rate_cmd = np.sin(time) # 示例数据
yaw_rate_real = np.sin(time - 0.5) * 0.8 # 示例数据
heading_angle = np.piecewise(time, [time < 3, (time >= 3) & (time < 6), time >= 6], [45, 90, 135]) # 示例数据
# 创建图像和轴对象
fig, ax1 = plt.subplots()
# 设置绘图风格
plt.style.use('seaborn-whitegrid')
# 绘制实际角速度信号(置于底层,用小点表示)
ax1.plot(time, yaw_rate_real, 'k:', label='Actual Yaw Rate', zorder=1)
# 创建共享x轴的第二个y轴
ax2 = ax1.twinx()
# 绘制期望角速度信号(置于中层,用实线表示)
ax1.plot(time, yaw_rate_cmd, 'b-', label='Desired Yaw Rate', zorder=2)
# 绘制实际航向角信号(置于顶层,用实线表示)
ax2.plot(time, heading_angle, 'r-', label='Heading Angle', zorder=3)
# 指定的时间点
time_points = [3,6.25]
# # 对于每一个指定的时间点,画一条虚线
for time_point in time_points:
plt.axvline(x=time_point, color='g', linestyle='--', label='Significant Change' if time_point == time_points[0] else "")
# 因为所有虚线都具有相同的意义,所以我们只需要在图例中表示一次
# 检查time_point是否为第一个指定时间点,如果是,则添加图例标签
# 设置轴标题
ax1.set_xlabel('Time (s)')
ax1.set_ylabel('Yaw Rate (degrees/s)', color='b')
ax2.set_ylabel('Heading Angle (degrees)', color='r')
# 设置y轴颜色与曲线颜色一致
ax1.tick_params(axis='y', colors='blue')
ax2.tick_params(axis='y', colors='red')
# 增加图例
lines, labels = ax1.get_legend_handles_labels()
lines2, labels2 = ax2.get_legend_handles_labels()
ax2.legend(lines + lines2, labels + labels2, loc='upper right')
# 增加次要刻度线以提高可读性
ax1.xaxis.set_minor_locator(AutoMinorLocator())
ax1.yaxis.set_minor_locator(AutoMinorLocator())
ax2.yaxis.set_minor_locator(AutoMinorLocator())
# 显示图像
plt.show()
代码解释
- 首先绘制了三个曲线(实际角速度、期望角速度、实际航向角),其中实际角速度曲线使用小点样式表示
- 然后创建了一个共享x轴的第二个y轴来绘制航向角
- 最后,这个代码段会在3和6.25秒这三个时刻左右绘制绿色虚线,不论这些时刻是否存在于times数组中。图例中的"Significant Change"标签只会添加一次,避免重复。
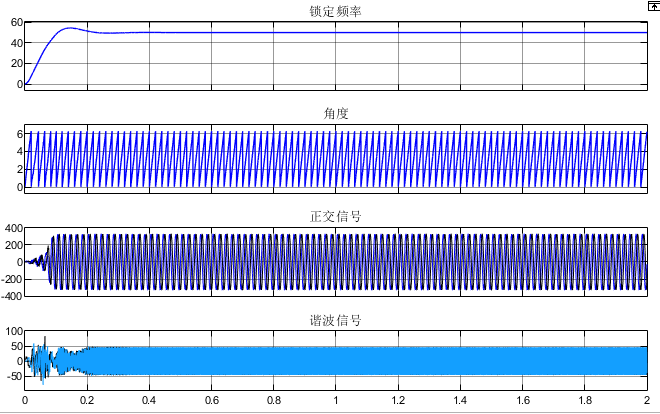
结果
延伸阅读
如何使用Python的matplotlib和seaborn库绘制颜色渐变的高级散点图