一、HC-SR04超声波模块
- 超声波测距原理
- 超声波的时序图
二、时间函数
- API测试代码
- 代码实现和验证
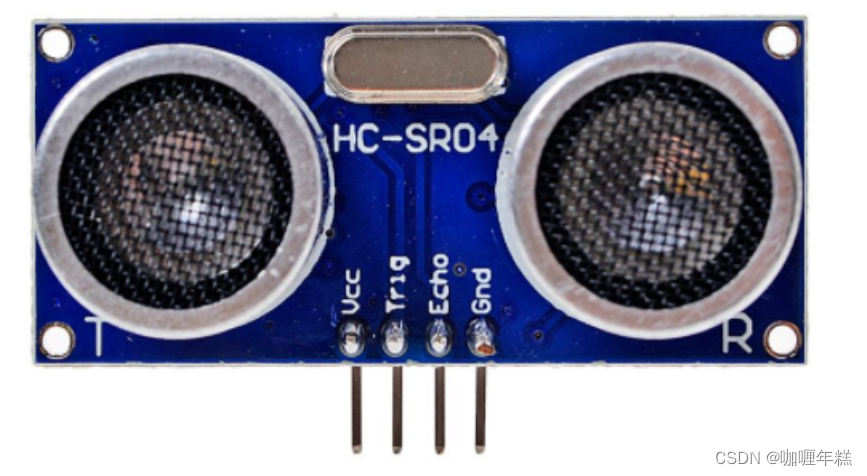
一、HC-SR04超声波模块
型号:HC-SR04
接线参考:模块除了两个电源引脚外,还有TRIG、ECHO引脚 / P0、P1
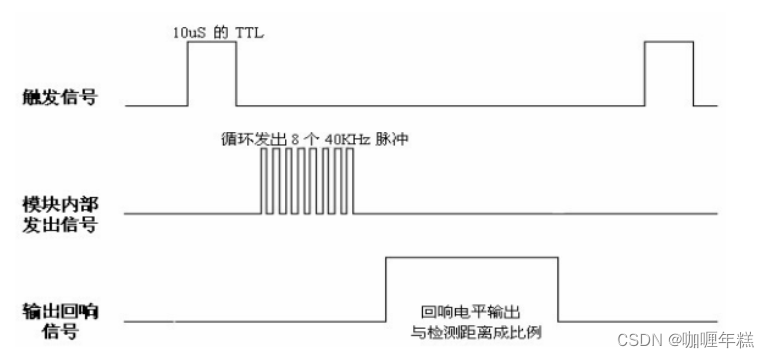
超声波测距原理
- 让它发送波:给Trig端口至少10us的高电平
- 开始发送波:Echo信号由低电平跳转到高电平
- 接收返回波:Echo信号由高电平跳转回低电平
- 计算时间 :Echo引脚维持高电平的时间!
开始发送波,启动定时器,接收到返回波,停止计时器- 计算距离 :测试距离=(高电平时间*声速(340m/s))/2
超声波的时序图
二、时间函数
API测试代码
#include<sys/time.h>
struct timeval {
long tv_sec;/*秒*/
long tv_usec;/*微妙*/
};
int gettimeofday(struct timeval *tv, struct timezone *tz )
gettimeofday()会把目前的时间用tv 结构体返回,当地时区的信息则放到tz所指的结构中
代码实现和验证
//计算程序在当前环境中数数10万次耗时多少
#include <sys/time.h>
#include <stdio.h>
//int gettimeofday(struct timeval *tv, struct timezone *tz )
void mydelay()
{
int i, j;
for(i=0; i<100; i++){
for(j=0; j<1000; j++);
}
}
int main()
{
struct timeval startTime;
struct timeval stopTime;
gettimeofday(&startTime, NULL);
mydelay();
gettimeofday(&stopTime, NULL);
long diffTime = 1000000 * (stopTime.tv_sec - startTime.tv_sec) + (stopTime.tv_usec - startTime.tv_usec);
printf("全志H616的Linux数100000耗时%ldus\n", diffTime);
return 0;
}

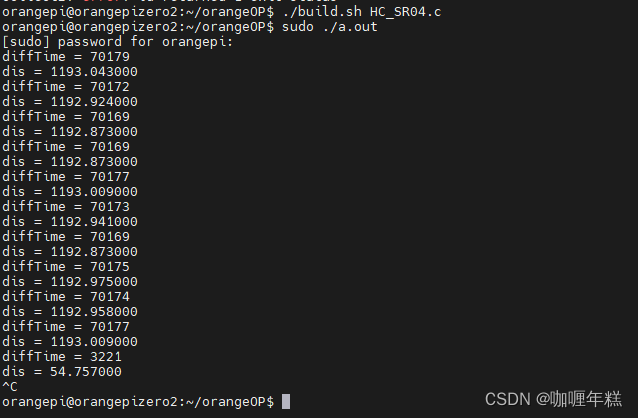
代码实现和验证
#include <stdio.h>
#include <sys/time.h>
#include <wiringPi.h>
#include <stdlib.h>
#include <unistd.h>
#define Trig 0
#define Echo 1
double getDistance()
{
double dis;
struct timeval start;
struct timeval stop;
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
digitalWrite(Trig, LOW);
usleep(5);
digitalWrite(Trig, HIGH);
usleep(10);
digitalWrite(Trig, LOW);
/*above init HC-SR04*/
while (!digitalRead(Echo));
gettimeofday(&start, NULL);
while (digitalRead(Echo));
gettimeofday(&stop, NULL);
long diffTime = 1000000 * (stop.tv_sec - start.tv_sec) + (stop.tv_usec - start.tv_usec);
printf("diffTime = %ld\n", diffTime);
dis = (double)diffTime / 1000000 * 34000 / 2;
return dis;
}
int main()
{
double dis;
if (wiringPiSetup() == -1){
fprintf(stderr, "%s","initWringPi error");
exit(-1);
}
while (1){
dis = getDistance();
printf("dis = %lf\n", dis);
usleep(500000);
}
return 0;
}