demo演示
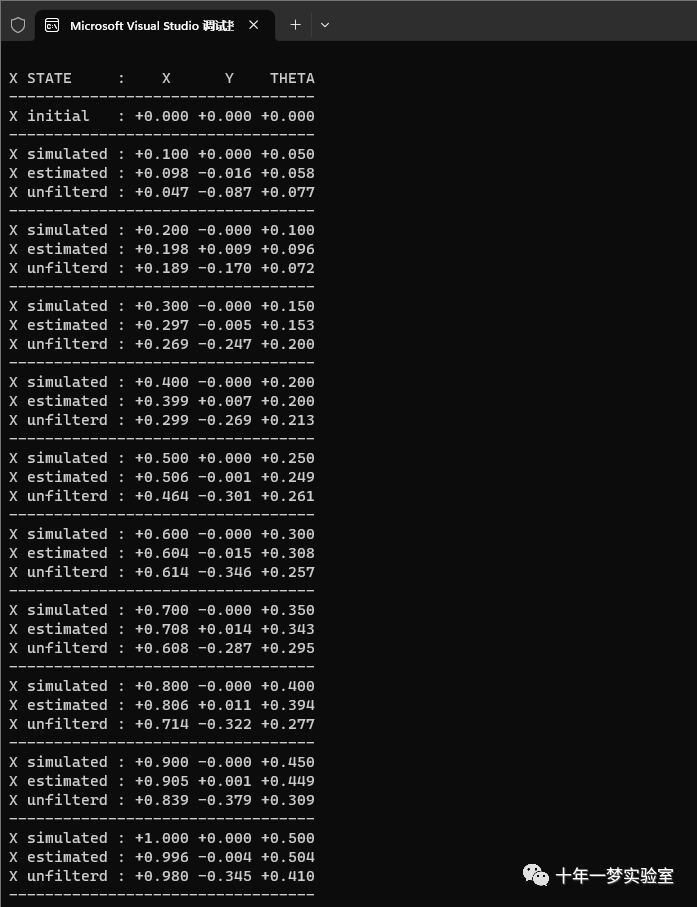
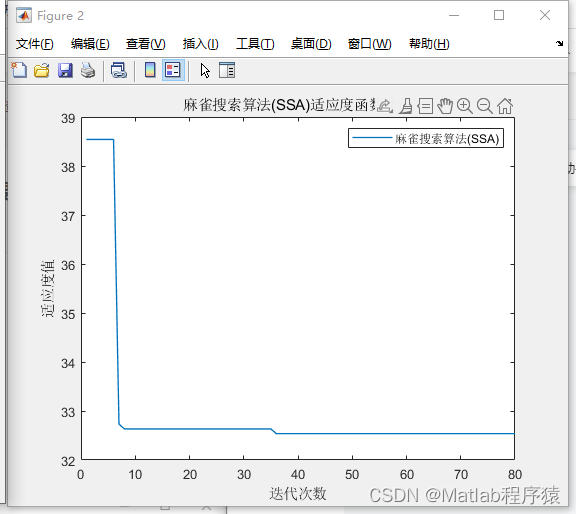
运行结果
我们考虑一个机器人在平面上被少量的准时地标或_信标 包围。
机器人以轴向速度和角速度的形式接收控制动作,并且能够测量信标相对于其自身参考系的位置。
机器人位姿 X 在 SE(2) 中,信标位置 b_k 在 R^2 中,
| cos th -sin th x |
* X = | sin th cos th y | //位置和方向
| 0 0 1 |
* b_k = (bx_k, by_k) // 世界坐标系中的lmk坐标
控制信号 u 是 se(2) 中的旋量,包括纵向速度 v 和角速度 w,没有横向速度分量,在采样时间 dt 上积分。
* u = (v*dt, 0, w*dt)
控制被带有协方差的加性高斯噪声 u_noise 破坏
* Q = diagonal(sigma_v^2, sigma_s^2, sigma_w^2).
此噪声解释了通过 sigma_s 非零值可能出现的横向滑移 u_s,
*当控制 u 到达时,机器人位姿更新为 X <-- X * Exp(u) = X + u。
地标测量是范围和方位类型,但为了简单起见,它们采用笛卡尔形式。
它们的噪声 n 是零均值高斯分布,并用协方差矩阵 R 指定。
我们注意到刚性运动动作 y = h(X,b) = X^-1 * b
* y_k = (brx_k, bry_k) // 机器人坐标系中的lmk坐标
我们考虑位于已知位置的信标 b_k。
我们将要估计的位姿定义为 SE(2) 中的 X。
估计误差 dx 及其协方差 P 在 X 处的切线空间中表示。
*所有这些变量再次总结如下
* * X : 机器人位姿,SE(2)
* u :机器人控制量,(v*dt ; 0 ; w*dt) in se(2)
* Q : 控制扰动协方差
* b_k : 第 k 个地标位置,R^2
* y :机器人坐标系中的笛卡尔地标测量,R^2
* R : 测量噪声的协方差
* The motion and measurement models are运动和测量模型是
* X_(t+1) = f(X_t, u) = X_t * Exp ( w ) //运动方程
* y_k = h(X, b_k) = X^-1 * b_k //测量方程
下面的算法首先包括一个模拟器来产生测量结果,然后使用这些测量结果来估计状态,使用基于李的误差状态卡尔曼滤波器。最后,打印模拟状态和估计状态以及未过滤状态(即没有卡尔曼校正)可以评估估计的质量。
#include "manif/SE2.h"
#include <vector>
#include <iostream>
#include <iomanip>
using std::cout;
using std::endl;
using namespace Eigen;
typedef Array<double, 2, 1> Array2d;
typedef Array<double, 3, 1> Array3d;
int main()
{
std::srand((unsigned int) time(0));
// START CONFIGURATION
//
//
const int NUMBER_OF_LMKS_TO_MEASURE = 3;
// Define the robot pose element and its covariance
manif::SE2d X, X_simulation, X_unfiltered;
Matrix3d P;
X_simulation.setIdentity();
X.setIdentity();
X_unfiltered.setIdentity();
P.setZero();
// Define a control vector and its noise and covariance
manif::SE2Tangentd u_simu, u_est, u_unfilt;
Vector3d u_nom, u_noisy, u_noise;
Array3d u_sigmas;
Matrix3d U;
u_nom << 0.1, 0.0, 0.05;
u_sigmas << 0.1, 0.1, 0.1;
U = (u_sigmas * u_sigmas).matrix().asDiagonal();
// Declare the Jacobians of the motion wrt robot and control
manif::SE2d::Jacobian J_x, J_u;
// Define three landmarks in R^2
Eigen::Vector2d b0, b1, b2, b;
b0 << 2.0, 0.0;
b1 << 2.0, 1.0;
b2 << 2.0, -1.0;
std::vector<Eigen::Vector2d> landmarks;
landmarks.push_back(b0);
landmarks.push_back(b1);
landmarks.push_back(b2);
// Define the beacon's measurements
Vector2d y, y_noise;
Array2d y_sigmas;
Matrix2d R;
std::vector<Vector2d> measurements(landmarks.size());
y_sigmas << 0.01, 0.01;
R = (y_sigmas * y_sigmas).matrix().asDiagonal();
// Declare the Jacobian of the measurements wrt the robot pose
Matrix<double, 2, 3> H; // H = J_e_x
// Declare some temporaries
Vector2d e, z; // expectation, innovation
Matrix2d E, Z; // covariances of the above
Matrix<double, 3, 2> K; // Kalman gain
manif::SE2Tangentd dx; // optimal update step, or error-state
manif::SE2d::Jacobian J_xi_x; // Jacobian is typedef Matrix
Matrix<double, 2, 3> J_e_xi; // Jacobian
//
//
// CONFIGURATION DONE
// DEBUG
cout << std::fixed << std::setprecision(3) << std::showpos << endl;
cout << "X STATE : X Y THETA" << endl;
cout << "----------------------------------" << endl;
cout << "X initial : " << X_simulation.log().coeffs().transpose() << endl;
cout << "----------------------------------" << endl;
// END DEBUG
// START TEMPORAL LOOP
//
//
// Make 10 steps. Measure up to three landmarks each time.
for (int t = 0; t < 10; t++)
{
I. Simulation ###############################################################################
/// simulate noise
u_noise = u_sigmas * Array3d::Random(); // control noise
u_noisy = u_nom + u_noise; // noisy control
u_simu = u_nom;
u_est = u_noisy;
u_unfilt = u_noisy;
/// first we move - - - - - - - - - - - - - - - - - - - - - - - - - - - -
X_simulation = X_simulation + u_simu; // overloaded X.rplus(u) = X * exp(u)
/// then we measure all landmarks - - - - - - - - - - - - - - - - - - - -
for (std::size_t i = 0; i < landmarks.size(); i++)
{
b = landmarks[i]; // lmk coordinates in world frame
/// simulate noise
y_noise = y_sigmas * Array2d::Random(); // measurement noise
y = X_simulation.inverse().act(b); // landmark measurement, before adding noise
y = y + y_noise; // landmark measurement, noisy
measurements[i] = y; // store for the estimator just below
}
II. Estimation ###############################################################################
/// First we move - - - - - - - - - - - - - - - - - - - - - - - - - - - -
X = X.plus(u_est, J_x, J_u); // X * exp(u), with Jacobians
P = J_x * P * J_x.transpose() + J_u * U * J_u.transpose();
/// Then we correct using the measurements of each lmk - - - - - - - - -
for (int i = 0; i < NUMBER_OF_LMKS_TO_MEASURE; i++)
{
// landmark
b = landmarks[i]; // lmk coordinates in world frame
// measurement
y = measurements[i]; // lmk measurement, noisy
// expectation
e = X.inverse(J_xi_x).act(b, J_e_xi); // note: e = R.tr * ( b - t ), for X = (R,t).
H = J_e_xi * J_xi_x; // note: H = J_e_x = J_e_xi * J_xi_x
E = H * P * H.transpose();
// innovation
z = y - e;
Z = E + R;
// Kalman gain
K = P * H.transpose() * Z.inverse(); // K = P * H.tr * ( H * P * H.tr + R).inv
// Correction step
dx = K * z; // dx is in the tangent space at X
// Update
X = X + dx; // overloaded X.rplus(dx) = X * exp(dx)
P = P - K * Z * K.transpose();
}
III. Unfiltered ##############################################################################
// move also an unfiltered version for comparison purposes
X_unfiltered = X_unfiltered + u_unfilt;
IV. Results ##############################################################################
// DEBUG
cout << "X simulated : " << X_simulation.log().coeffs().transpose() << endl;
cout << "X estimated : " << X.log().coeffs().transpose() << endl;
cout << "X unfilterd : " << X_unfiltered.log().coeffs().transpose() << endl;
cout << "----------------------------------" << endl;
// END DEBUG
}
//
//
// END OF TEMPORAL LOOP. DONE.
return 0;
}
The End





![[极客大挑战 2019]LoveSQL 1](https://img-blog.csdnimg.cn/img_convert/1a0380212085fca284886acd6a919253.png)

![[AUTOSAR][诊断管理][ECU][$85] 设置DTC功能](https://img-blog.csdnimg.cn/6bf34e200a2e400881c9ffaab2d3353b.png)