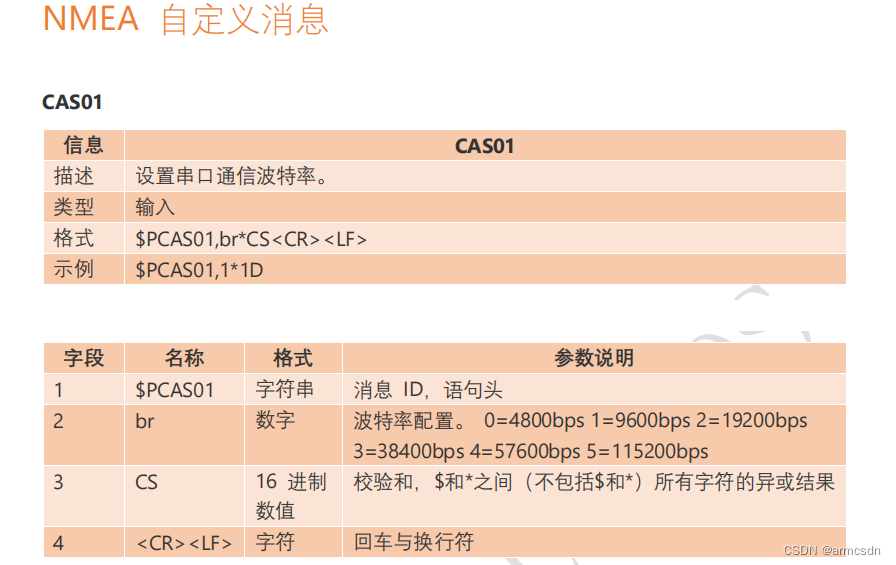
AIR530Z串口波特率默认9600,但实际应用中需要更高的波特率,可选波特率见下图。
主控采用合宙AIR700E核心板,通过UART1连接AIR530Z
合宙Luatos uart官方文档
主要问题
AIR700E要改变AIR530Z的波特率,在默认9600波特率情况下通过发送“$PCAS01,5*19\r\n”即可,之后改变AIR700E UART1到指定波特率即可。
但改变AIR700E波特率同时,AIR530Z一直在发送数据,如果已经编写uart.on的receive事件响应函数话,那重新设定AIR700E的波特率的进程就会被打断,最后导致系统崩溃。现在的问题是找到保证设定波特率进程不被打断的方法,经咨询合宙技术支持和查阅文档,只能利用uart.on的sent事件保护并完成波特率设定。
但悲催的是uart.on的sent事件在uart.write发送第一字符时就会触发,如果此时如下编写,一定达不到预期效果,因为改变AIR530Z的数据还发送完,主机就改变波特率了。
uart.on(UART_ID1, "sent", function(uid)
result1 = uart.setup(
UART_ID1,--串口id
115200,--波特率
8,--数据位
1--停止位
)
print("已改变Air700 UART1串口波特率")
uart.write(UART_ID1,"$PCAS02,1000*2E\r\n")--设置定位更新率1Hz
end) 解决办法
经过多次试验,发现找到改变AIR700E的UART1串口的有效方法。
代码1
sys.taskInit(function()
uart.write(UART_ID1,"$PCAS01,5*19\r\n")
BSP_FLAG=1
uart.write(UART_ID1," ")--触发uart.on的sent事件
print("已改变GPS串口波特率")
end)代码2
uart.on(UART_ID1, "sent", function(uid)
if BSP_FLAG==1 then
uart.close(UART_ID1)
result1 = uart.setup(
UART_ID1,--串口id
115200,--波特率
8,--数据位
1--停止位
)
print("已改变Air700 UART1串口波特率")
uart.write(UART_ID1,"$PCAS02,1000*2E\r\n")--设置定位更新率1Hz
sys.publish("115200")
BSP_FLAG=0
end
end) 代码1中利用BSP_FLAG全局变量实现在uart.on的sent事件响应函数中只能改变一次波特率。BSP_FLAG=1时,但 uart.on的sent事件外部条件已经消失,导致代码2不会执行。
此时最关键又看似没用的是uart.write(UART_ID1," "),它再次触发uart.on的sent事件,结合BSP_FLAG==1条件开启UART1的波特率的设定。成功改变波特率之后通过消息设置uart.on的receive事件的响应,接收AIR530Z发送的信息。
通过串口反馈的信息可以看到波特率改变成功。
[2023-11-03 09:00:54.869] 工具提示: soc log port COM12打开成功
[2023-11-03 09:00:54.923] 工具提示: ap log port COM10打开成功
[2023-11-03 09:00:54.928] 工具提示: 用户虚拟串口 COM11
[2023-11-03 09:00:54.998][000000000.011] BSP_CustomInit 444:fault mode 2 not safe ,change to 3
[2023-11-03 09:00:54.998][000000000.011] Uart_BaseInitEx 1032:uart 0 rx cache 256 dma 256
[2023-11-03 09:00:54.998][000000000.206] I/pm poweron: Power/Reset
[2023-11-03 09:00:54.998][000000000.206] I/main LuatOS@EC618 base 22.12 bsp V1107 32bit
[2023-11-03 09:00:54.998][000000000.206] I/main ROM Build: Jul 10 2023 15:23:28
[2023-11-03 09:00:54.998][000000000.213] D/main loadlibs luavm 262136 13504 13536
[2023-11-03 09:00:55.009][000000000.213] D/main loadlibs sys 286384 53792 57008
[2023-11-03 09:00:55.009][000000000.223] I/user.main AIR700E_UART1_AIR530Z 1.0.0
[2023-11-03 09:00:55.009][000000000.238] I/user.main AIR700 UART1改变AIR530Z串口波特率
[2023-11-03 09:00:55.009][000000000.239] Uart_BaseInitEx 1032:uart 1 rx cache 2048 dma 512
[2023-11-03 09:00:55.009][000000000.242] 已改变GPS串口波特率
[2023-11-03 09:00:55.009][000000000.261] Uart_BaseInitEx 1032:uart 1 rx cache 2048 dma 512
[2023-11-03 09:00:55.018][000000000.262] 已改变Air700 UART1串口波特率
[2023-11-03 09:00:55.018][000000000.385] self_info 125:model Air700E_A11 imei 864269064914126
[2023-11-03 09:00:55.018][000000000.428] $GNGGA,,,,,,0,00,25.5,,,,,,*64
$GNGLL,,,,,,V,N*7A
$GNGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5,1*01
$GNGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5,4*04
$GPGSV,1,1,00,0*65
$BDGSV,1,1,00,0*74
$GNRMC,,V,,,,,,,,,,N,V*37
$GNVTG,,,,,,,,,N*2E
$GNZDA,,,,,,*56
$GPTXT,01,01,01,ANTENNA OK*35
[2023-11-03 09:00:55.369][000000000.862] D/mobile CSCON 1
[2023-11-03 09:00:55.939][000000001.426] $GNGGA,,,,,,0,00,25.5,,,,,,*64
$GNGLL,,,,,,V,N*7A
$GNGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5,1*01
$GNGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5,4*04
$GPGSV,1,1,00,0*65
$BDGSV,1,1,00,0*74
$GNRMC,,V,,,,,,,,,,N,V*37
$GNVTG,,,,,,,,,N*2E
$GNZDA,,,,,,*56
$GPTXT,01,01,01,ANTENNA OK*35
[2023-11-03 09:00:56.439][000000001.904] D/mobile cid1, state0
[2023-11-03 09:00:56.439][000000001.905] D/mobile bearer act 0, result 0
[2023-11-03 09:00:56.444][000000001.906] D/mobile NETIF_LINK_ON -> IP_READY
[2023-11-03 09:00:56.448][000000001.941] D/mobile TIME_SYNC 0
[2023-11-03 09:00:56.935][000000002.425] $GNGGA,,,,,,0,00,25.5,,,,,,*64
$GNGLL,,,,,,V,N*7A
$GNGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5,1*01
$GNGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5,4*04
$GPGSV,1,1,00,0*65
$BDGSV,1,1,00,0*74
$GNRMC,,V,,,,,,,,,,N,V*37
$GNVTG,,,,,,,,,N*2E
$GNZDA,,,,,,*56
$GPTXT,01,01,01,ANTENNA OK*35
完整代码
-- LuaTools需要PROJECT和VERSION这两个信息
PROJECT = "AIR700E_UART1_AIR530Z"
VERSION = "1.0.0"
log.info("main", PROJECT, VERSION)
-- 引入必要的库文件(lua编写), 内部库不需要require
local sys = require "sys"
local UART1_AT_Receive
local CON_STAT_FLAG=0
if wdt then
--添加硬狗防止程序卡死,在支持的设备上启用这个功能
wdt.init(15000)--初始化watchdog设置为15s
sys.timerLoopStart(wdt.feed, 10000)--10s喂一次狗
end
log.info("main","AIR700 UART1改变AIR530Z串口波特率")
-- 串口ID,串口读缓冲区
-- local UART_ID0, UART0sendQueue = 0, {}
local UART_ID1, UART1sendQueue = 1, {}
-- 串口超时,串口准备好后发布的消息
--例子是100ms,按需求改
local uartimeout, UART1recvReady= 50,"UART_RECV_ID1"
--初始化
local LED = gpio.setup(27, 1, gpio.PULLUP)--监视串口是否正常工作
local BSP_FLAG=0
local result1 = uart.setup(
UART_ID1,--串口id
9600,--波特率
8,--数据位
1--停止位
)
sys.taskInit(function()
uart.write(UART_ID1,"$PCAS01,5*19\r\n")
BSP_FLAG=1
uart.write(UART_ID1," ")--触发uart.on的sent事件
print("已改变GPS串口波特率")
end)
uart.on(UART_ID1, "sent", function(uid)
if BSP_FLAG==1 then
uart.close(UART_ID1)--此代码注释掉也能实现波特率更改
result1 = uart.setup(
UART_ID1,--串口id
115200,--波特率
8,--数据位
1--停止位
)
print("已改变Air700 UART1串口波特率")
uart.write(UART_ID1,"$PCAS02,1000*2E\r\n")--设置定位更新率1Hz
sys.publish("115200")
BSP_FLAG=0
end
end)
local function isempty(s)--判断字符串是否为空
return s == nil or s == ''
end
local count = 0--闪烁LED计数器
sys.subscribe("115200",function()
uart.on(UART_ID1, "receive", function(uid, length)
local s
while true do--保证读完不能丢包
s = uart.read(uid, length)
if #s == 0 then break end
table.insert(UART1sendQueue, s)
LED(count % 3 == 0 and 1 or 0)
count = count + 1
if count==5000 then
count=0
end
end
sys.timerStart(sys.publish, uartimeout, UART1recvReady)
end)
end)
-- 向串口发送收到的字符串
sys.subscribe(UART1recvReady, function()
local link_stat,recv_len
--拼接所有收到的数据
local str = table.concat(UART1sendQueue)
-- 串口的数据读完后清空缓冲区
UART1sendQueue = {}
print(str)
end)
-- 用户代码已结束---------------------------------------------
-- 结尾总是这一句
sys.run()
-- sys.run()之后后面不要加任何语句!!!!!