目录
ROS常用命令
常用命令
ROS多机通信步骤
虚拟机中添加镜像源
TX2中添加镜像源
ROS常用命令
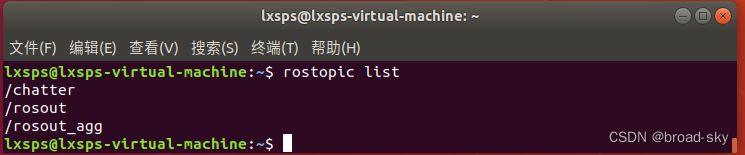
rostopic list 命令查看当前系统中有哪些 topic。
rostopic info 命令查看该 topic 的信息,包括它的数据类型、发布者数量等。
rostopic hz 命令查看该 topic 的发布频率。
rosnode list 命令查看当前系统中有哪些节点。
rosnode info 命令查看该节点的信息,包括它的 PID、运行状态等。
rqt_graph 命令查看当前系统中节点之间的连接关系。
rostopic+echo+/chatter:查看话题chatter消息。
rosrun+功能包名+节点名:运行ROS节点。
创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
编译工作空间
cd ~/catkin_ws
catkin_make
source devel/setup.bash 设置环境变量
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_topic std_msgs rospy roscpp geometry_msgs
编译功能包
cd ~/catkin_ws
catkin_make
source devel/setup.bash或 采用
echo "source /home/sps/sps/catkin_sps_ws/devel/setup.bash">>~/.bashrc
检查环境变量
echo $ROS_PACKAGE_PATH
Ubuntu常用命令
hostname:查看本机名称。
ifconfig:查看网络ip。
ssh远程登陆:
ssh 用户名@IP地址。文件权限:sudo chmod 777 file。
df -h:查看磁盘空间。
ROS多机通信步骤
需求:TX2 发布话题,虚拟机订阅话题,采用ROS分布式方式。设备:TX2 ubuntu18.04.6、虚拟机ubuntu18.04.6。
1、配置网络
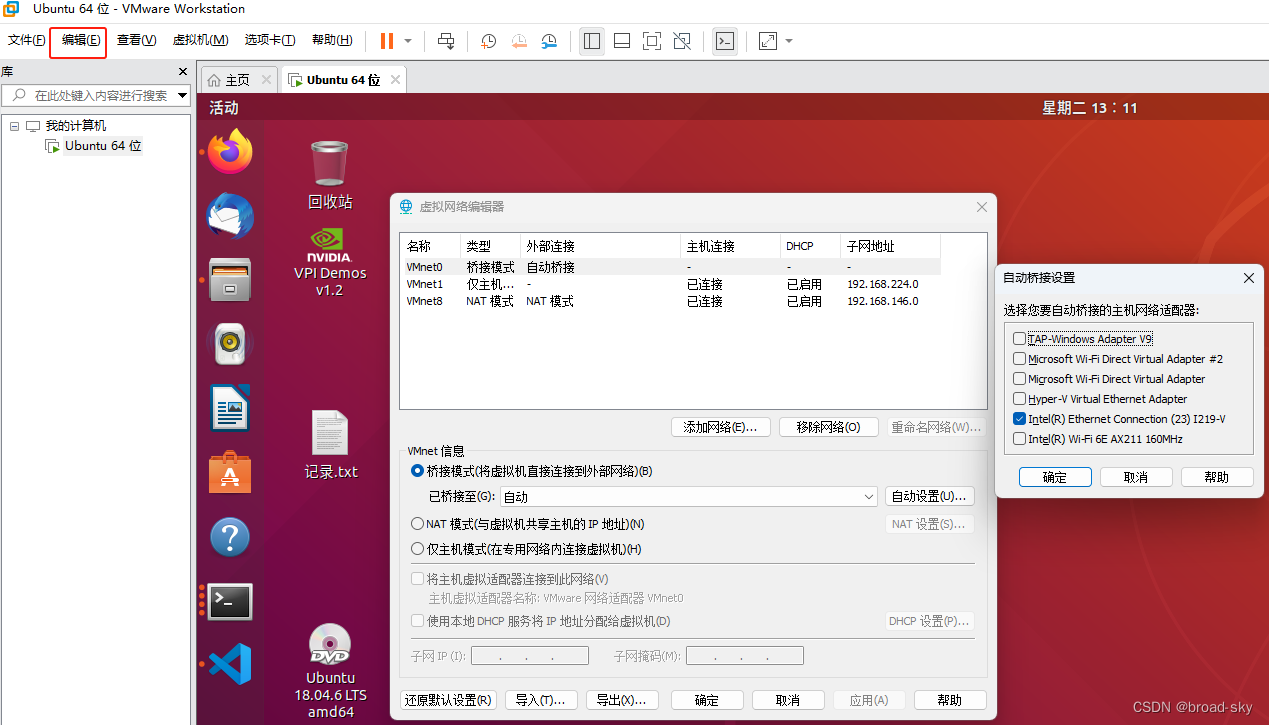
a、将虚拟机网络设置为桥接模式,其他模式均不可。
虚拟机设置-->网络适配器-->桥接模式 虚拟机菜单栏:编辑-->虚拟网络编辑器-->添加网络-->选择桥接模式-->选择对应的网卡(例如Inter(R) Ethernet Connection(23) I219-V)即可。
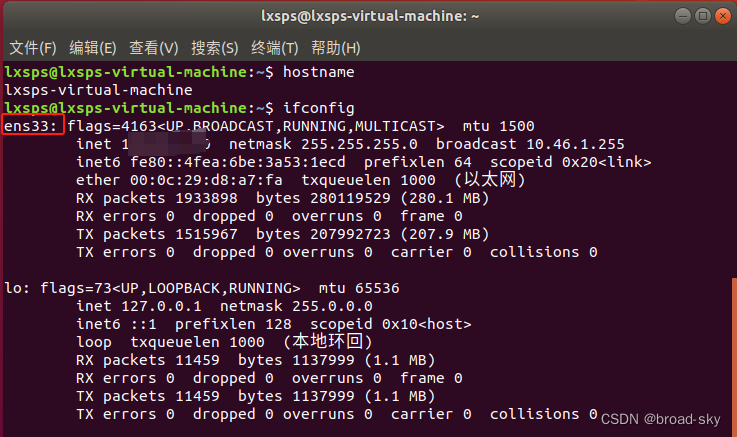
b、设置网络名称
查看本机与从机的hostname与ip,其命令分别为:hostname、ifconfig。
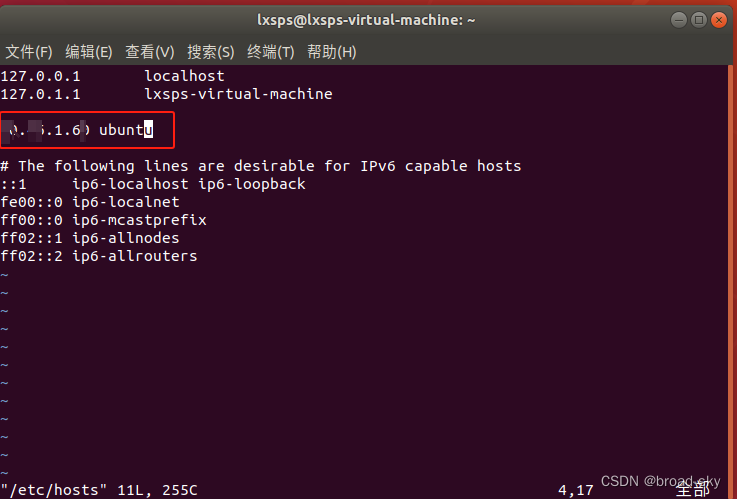
修改虚拟机hosts文件:sudo vim /etc/hosts,虚拟机中添加TX2的ip和hostname,如ip+ hostname,10.46.10.60 ubuntu,TX2中添加虚拟机的hostname和ip,如ip + hostname,10.46.10.61 virtual-machine。
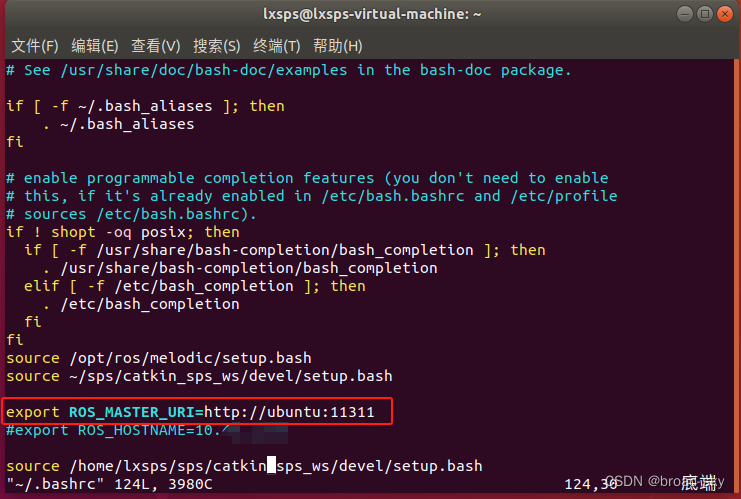
c、修改bash
修改bash命令:sudo vim ~/.bashrc,添加:export ROS_MASTER_URI=http://tx2:11311,source生效:source ~/.bashrc。
d、互ping虚拟机与tx2
在虚拟机中: ping tx2 ;在TX2中:ping virtual-machine,如果能ping通,则表明网络正常。
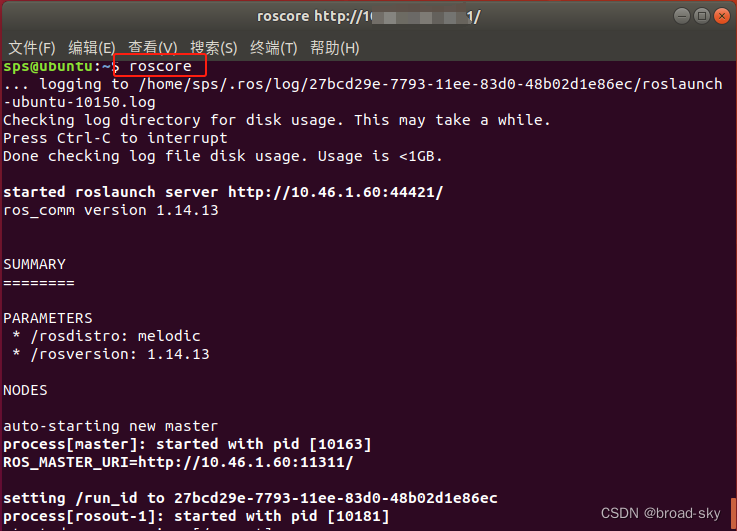
e、tx2中启动master
在tx2中启动master:roscore,在虚拟机中查看话题:rostopic list,若能看到话题列表说明配置成功。
虚拟机中添加镜像源
运行命令:sudo vim /etc/apt/sources.list
# deb cdrom:[Ubuntu 18.04.6 LTS _Bionic Beaver_ - Release amd64 (20210915)]/ bionic main restricted
# See http://help.ubuntu.com/community/UpgradeNotes for how to upgrade to
# newer versions of the distribution.
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted
# deb-src http://cn.archive.ubuntu.com/ubuntu/ bionic main restricted
## Major bug fix updates produced after the final release of the
## distribution.
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted
# deb-src http://cn.archive.ubuntu.com/ubuntu/ bionic-updates main restricted
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team. Also, please note that software in universe WILL NOT receive any
## review or updates from the Ubuntu security team.
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic universe
# deb-src http://cn.archive.ubuntu.com/ubuntu/ bionic universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates universe
# deb-src http://cn.archive.ubuntu.com/ubuntu/ bionic-updates universe
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team, and may not be under a free licence. Please satisfy yourself as to
## your rights to use the software. Also, please note that software in
## multiverse WILL NOT receive any review or updates from the Ubuntu
## security team.
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic multiverse
# deb-src http://cn.archive.ubuntu.com/ubuntu/ bionic multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates multiverse
# deb-src http://cn.archive.ubuntu.com/ubuntu/ bionic-updates multiverse
## N.B. software from this repository may not have been tested as
## extensively as that contained in the main release, although it includes
## newer versions of some applications which may provide useful features.
## Also, please note that software in backports WILL NOT receive any review
## or updates from the Ubuntu security team.
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
# deb-src http://cn.archive.ubuntu.com/ubuntu/ bionic-backports main restricted universe multiverse
## Uncomment the following two lines to add software from Canonical's
## 'partner' repository.
TX2中添加镜像源
运行命令:sudo vim /etc/apt/sources.list
## newer versions of some applications which may provide useful features.
## Also, please note that software in backports WILL NOT receive any review
## or updates from the Ubuntu security team.
#deb http://ports.ubuntu.com/ubuntu-ports/ bionic-backports main restricted universe multiverse
# deb-src http://ports.ubuntu.com/ubuntu-ports/ bionic-backports main restricted universe multiverse
## Uncomment the following two lines to add software from Canonical's
## 'partner' repository.
## This software is not part of Ubuntu, but is offered by Canonical and the
## respective vendors as a service to Ubuntu users.
# deb http://archive.canonical.com/ubuntu bionic partner
# deb-src http://archive.canonical.com/ubuntu bionic partner
#deb http://ports.ubuntu.com/ubuntu-ports/ bionic-security main restricted
# deb-src http://ports.ubuntu.com/ubuntu-ports/ bionic-security main restricted
#deb http://ports.ubuntu.com/ubuntu-ports/ bionic-security universe
# deb-src http://ports.ubuntu.com/ubuntu-ports/ bionic-security universe
#deb http://ports.ubuntu.com/ubuntu-ports/ bionic-security multiverse
# deb-src http://ports.ubuntu.com/ubuntu-ports/ bionic-security multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe