倾斜摄影三维模型的根节点合并注意事项浅析

倾斜摄影三维模型的根节点合并是构建高精度、真实感和稳定性的三维模型的关键步骤之一。在进行根节点合并时,需要注意以下几个重要的事项,以确保合并的准确性和可靠性。
首先,准确的相机标定是进行根节点合并的基础。相机标定是确定相机内外参数的过程,包括焦距、畸变参数、相机姿态等。正确的相机标定能够提供准确的相机投影模型,从而使照片能够准确地投影到三维空间中。因此,在进行根节点合并之前,必须对所有使用的相机进行充分的标定,并将标定参数应用于图像处理过程中。
其次,照片的质量和覆盖范围也是需要注意的关键因素。高质量的照片能够提供更多的细节信息和准确的特征点,有助于更好地进行图像匹配和根节点合并。此外,照片的覆盖范围应该足够广泛,涵盖目标物体的各个角度和部分,以便能够获取完整的三维信息。因此,在进行倾斜摄影时,应该选择适当的航线和拍摄视角,确保照片能够提供足够的信息。
另外,选取适当的参考坐标系也是进行根节点合并时需要考虑的因素之一。倾斜摄影数据通常需要参考一个已知的地理坐标系统,以便将照片的位置和方向信息转换为统一的坐标系。在选择参考坐标系时,应该考虑场景的特点和实际需求,如地理坐标系、局部坐标系等。此外,还需要确保参考坐标系与地面控制点或其他辅助测量方法的坐标系统保持一致,以避免误差和不一致性。
此外,图像匹配算法的选择和优化也是进行根节点合并时需要关注的重要问题。图像匹配算法决定了照片之间的对应关系的确定性和准确性。常用的图像匹配算法包括SIFT、SURF、ORB等。选择合适的算法需要考虑到图像质量、数量、复杂度以及计算资源等因素,并根据实际情况进行调整和优化。
最后,合理的数据存储和管理也是进行根节点合并时需要考虑的重要方面。倾斜摄影数据通常具有大规模的特点,包含大量的图像和点云数据。在进行根节点合并时,需要使用高效的数据存储和管理方式,以确保数据的安全性和访问性能。同时,还需要合理规划数据的组织结构和索引方式,便于快速检索和查询所需的数据。
总结起来,进行倾斜摄影三维模型的根节点合并时,需要注意相机标定、照片质量和覆盖范围、参考坐标系的选择、图像匹配算法的优化以及数据存储和管理等方面。这些注意事项可以帮助提高根节点合并的准确性和可靠性,并得到高质量的三维模型。未来随着技术的进一步发展,相信会有更多新的方法和工具被引入,进一步提升倾斜摄影三维模型根节点合并的效果和效率。
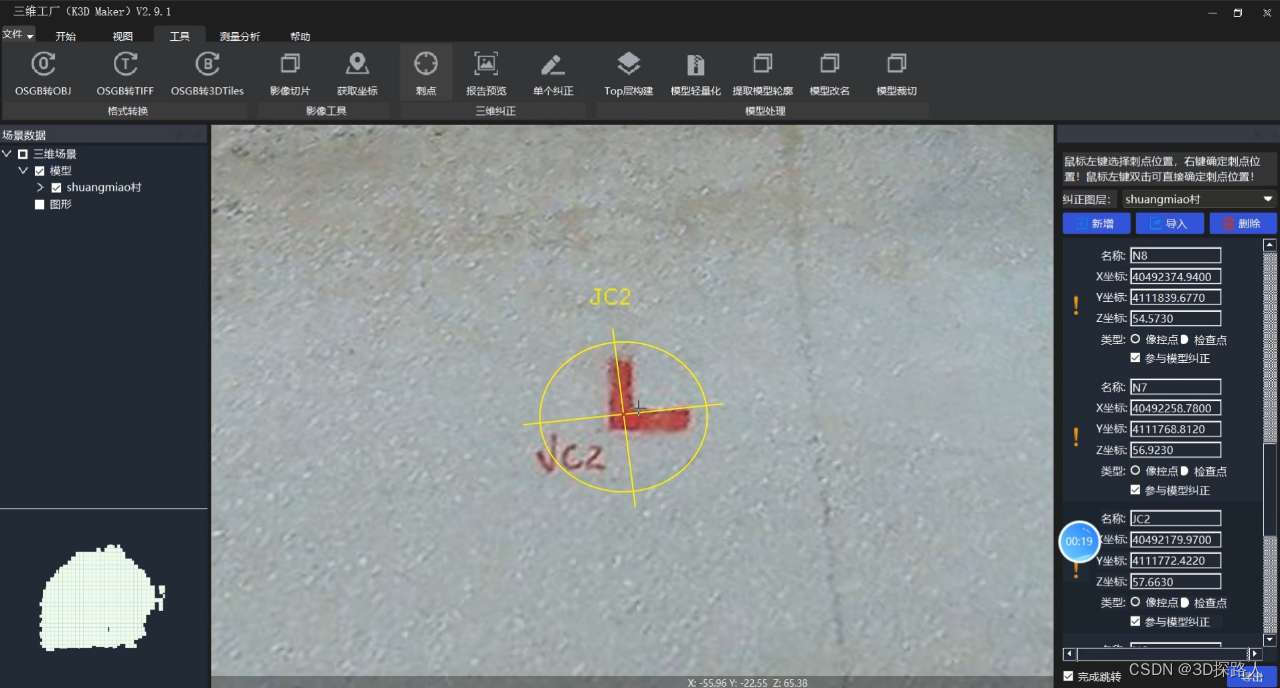
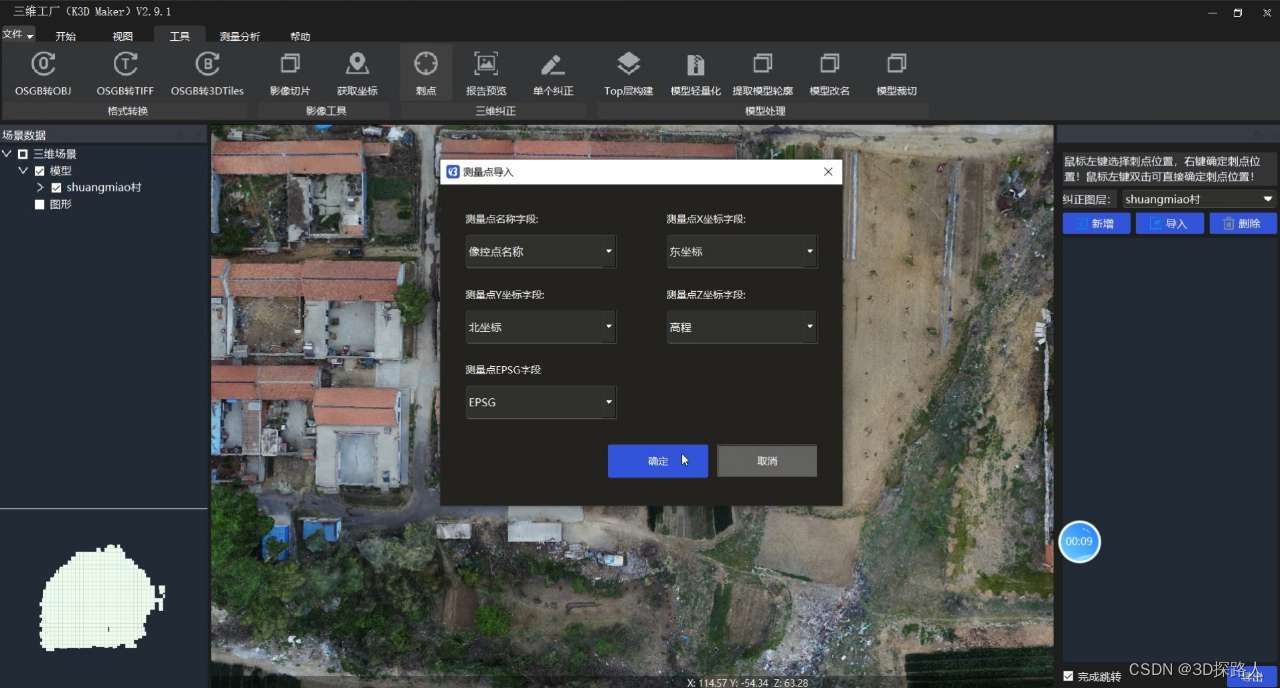
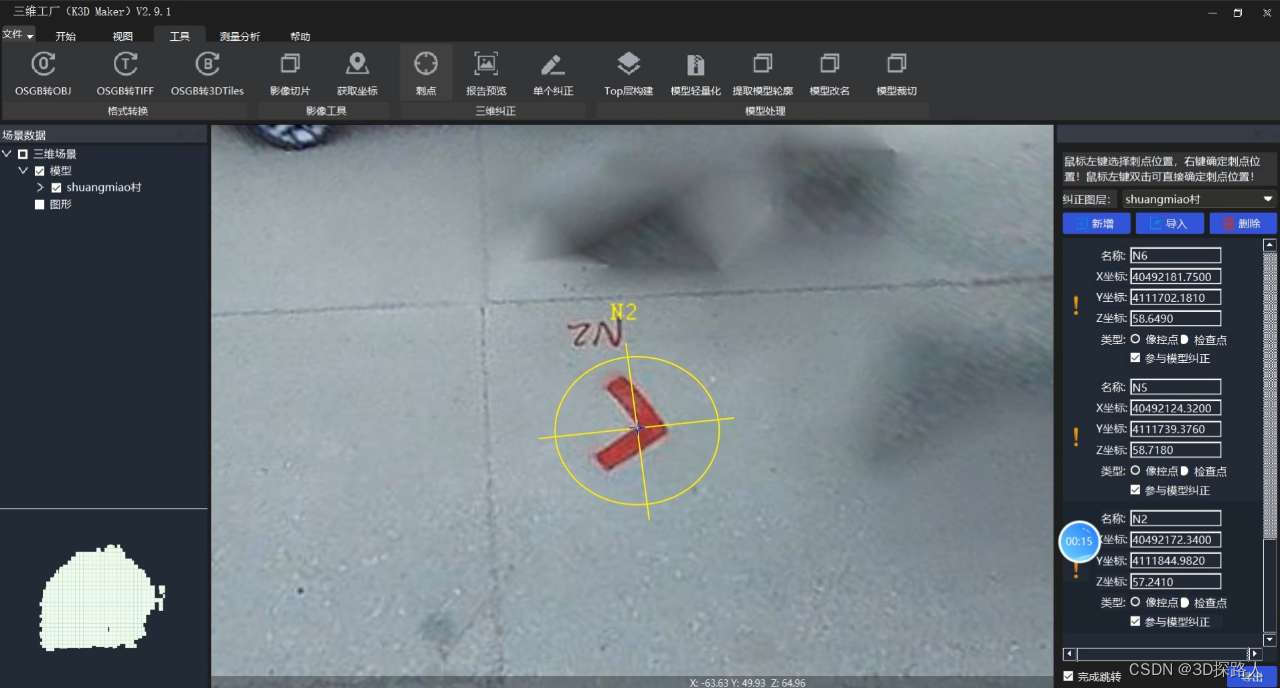
三维工厂软件介绍:

三维工厂K3DMaker是一款国内团队开发的三维模型浏览、分析、轻量化、顶层合并构建、根节点合并、几何校正(纠正)、格式转换、调色裁切、坐标转换等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。轻量化压缩比大,模型轻量化效率高,自动化处理能力高;采用多种算法对三维模型进行几何精纠正处理,精度高,处理速度快,超大模型支持;优秀数据处理和转换工具,支持将OSGB格式三维模型转换为3DTiles等格式,可快速进行转换。优点在于免费、功能强大、支持多种文件格式,适用于多种领域。与常用三维重建软件配合,对三维模型进行优化处理,提高模型质量,丰富数据成果。来体验一下这个软件吧!