一、前提准备
1.下载kdl库和kdl所依赖的eigen库, (在kdl库中找到FindEigen3可以查看里面所需要的Eigen3库所需要的最低版本)下载完成后重命名压缩包为kdl和eigen3之后解压缩文件
2.安装好cmake工具
二、建立build目录
..\kdl\orocos_kinematics_dynamics-master\orocos_kdl在这个目录下建立一个build目录,之后打开cmake工具
1.加入源代码路径和build目录路径

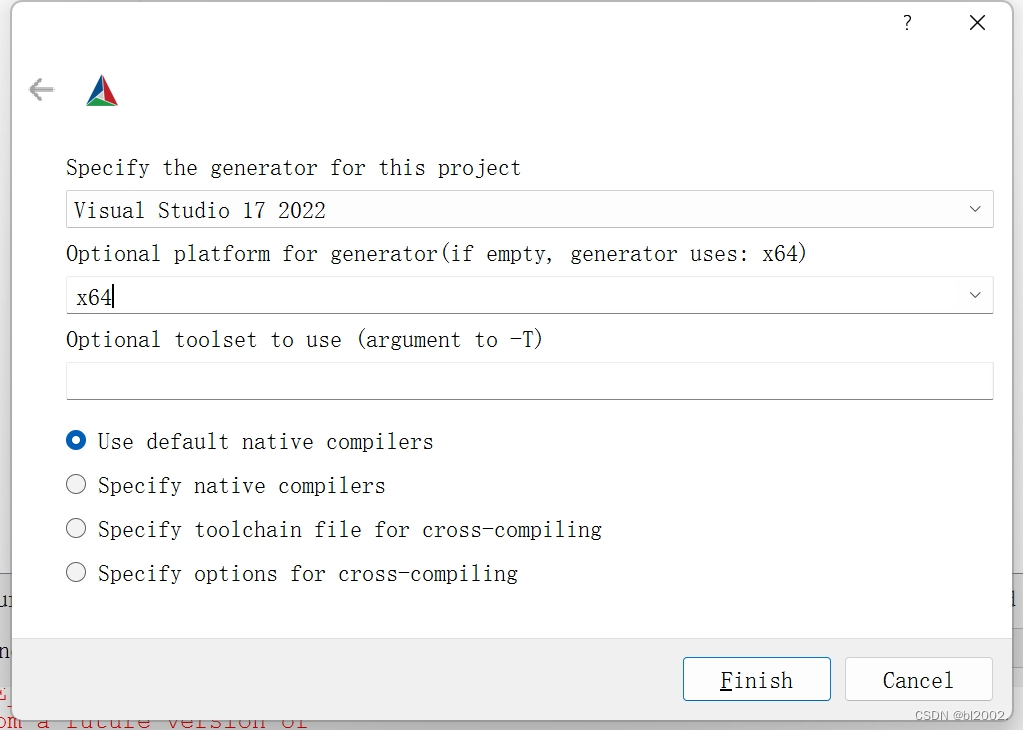
2.选择vs2022和x64
3.更改eigen路径和生成的lib文件路径


4.点击generate按钮生成
eigen库利用同样操作生成
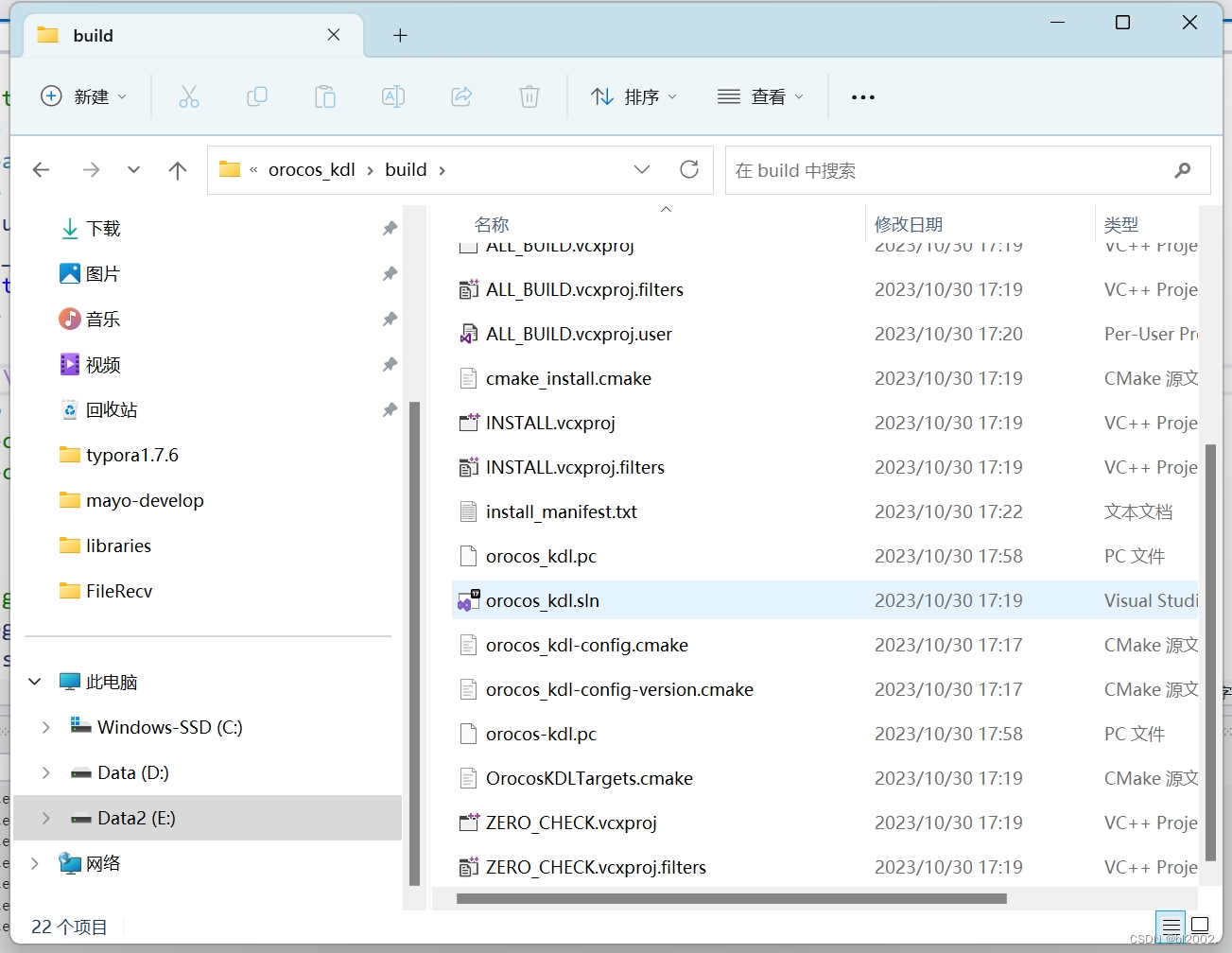
5. 在生成的build目录里打开sln文件
三、vs生成lib目录
1.点击vs上方功能栏的“生成”按钮->点击“批生成”
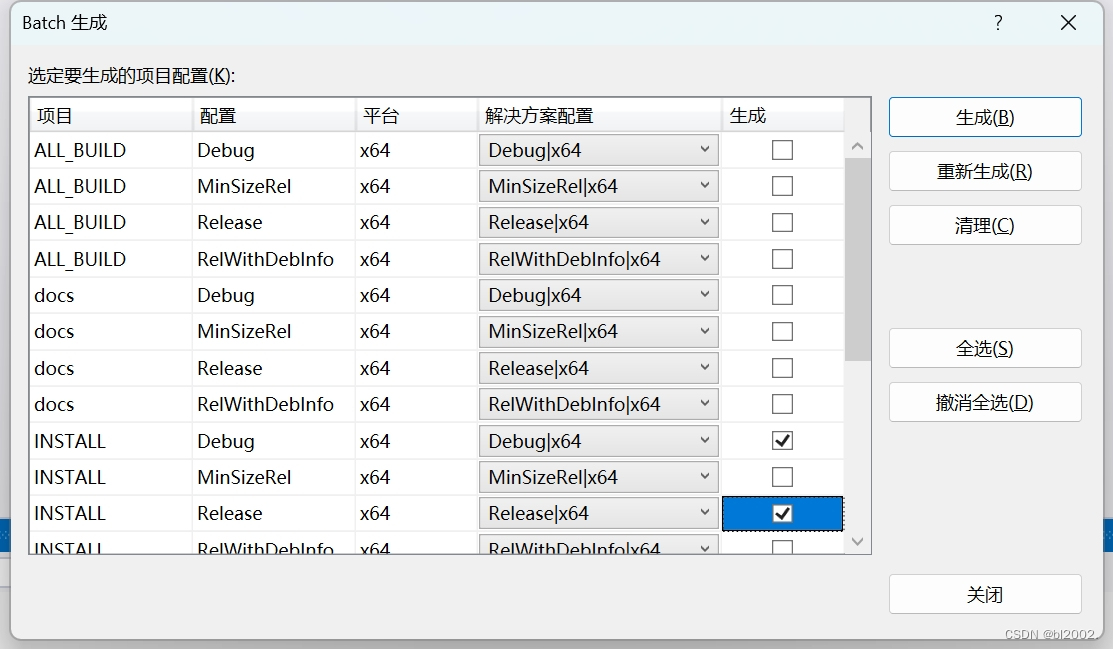
选择INSTALL项目中的debug和release之后点击生成

出现这种代表成功
四、项目引入库的使用
1.包含头文件
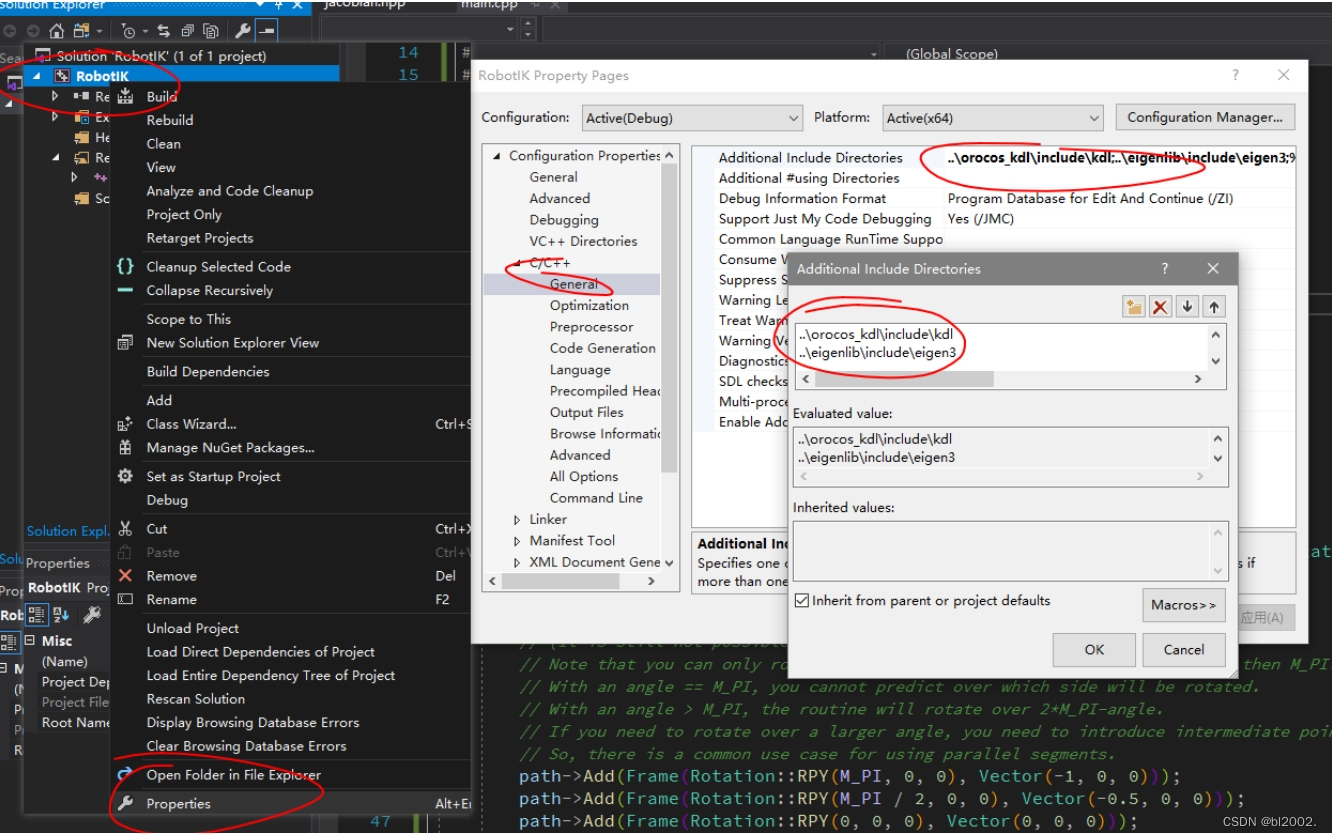
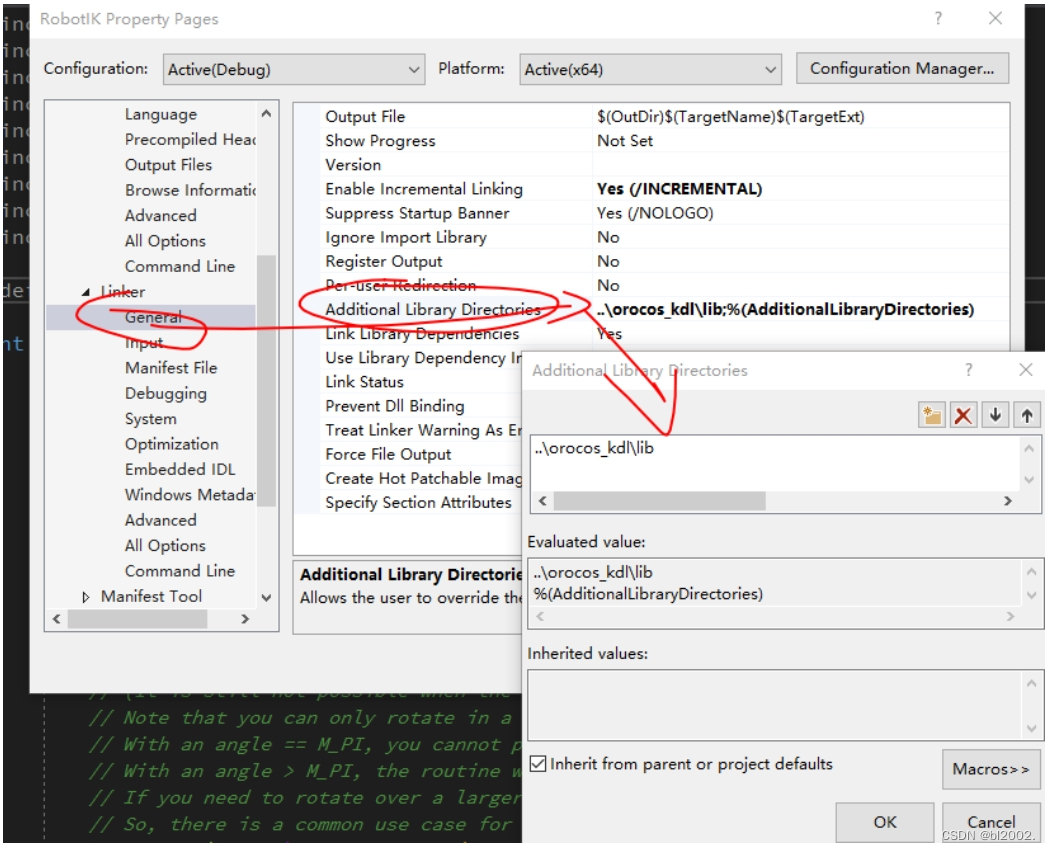
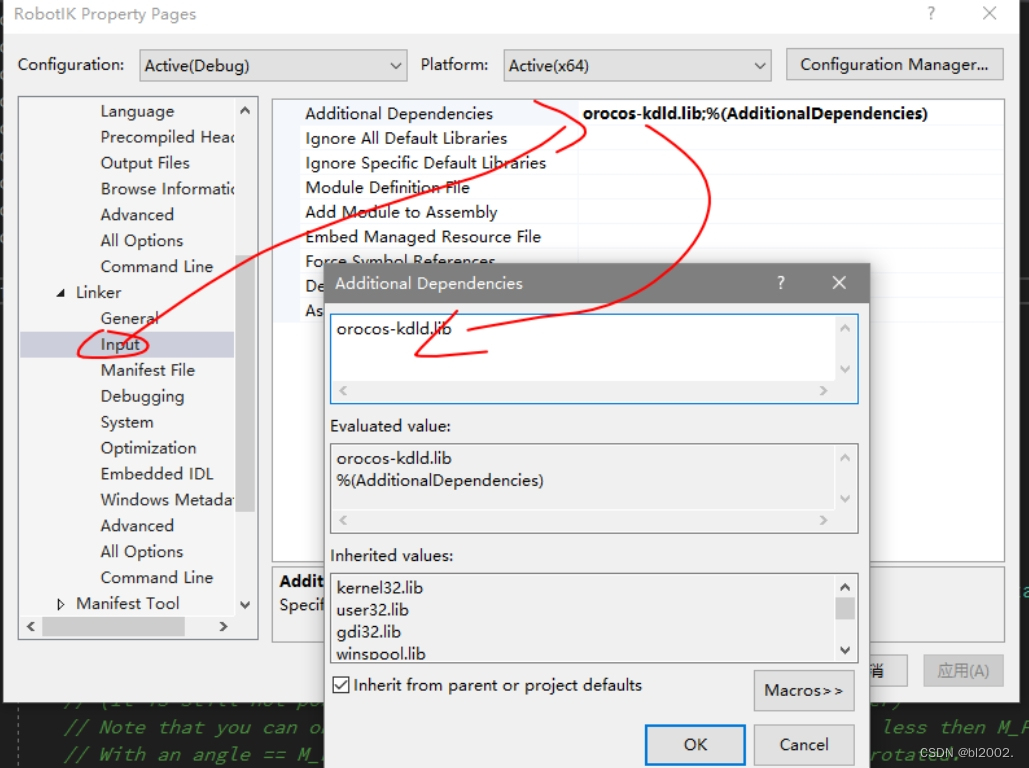
2.添加库目录